

CoRL은 2017년 처음 개최된 이래 로봇공학과 머신러닝의 교차점에서 세계 최고의 학술회의로 자리매김했습니다. CoRL은 이론과 응용을 포함해 로봇공학, 기계학습, 제어 등 다양한 주제를 다루는 로봇학습 연구를 위한 단일 주제 컨퍼런스입니다
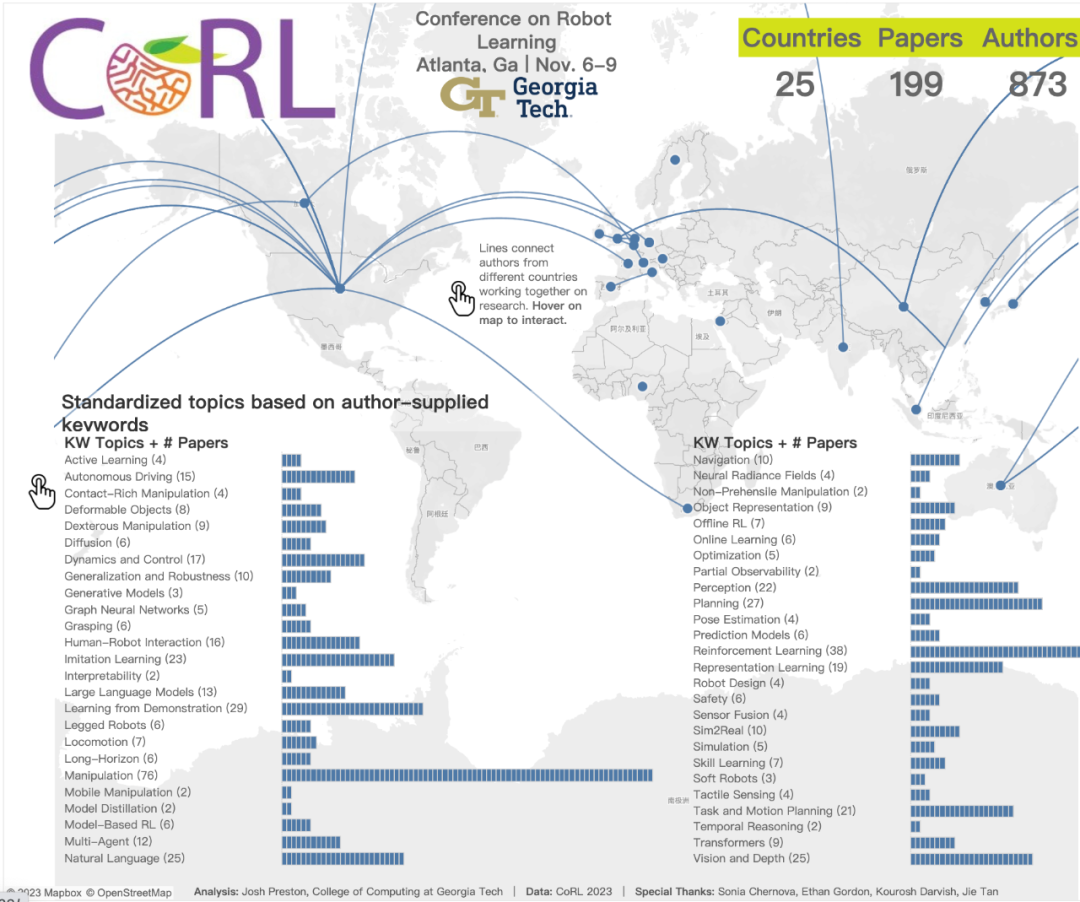
2023년 CoRL 컨퍼런스는 11월 6일부터 9일까지 미국 애틀랜타에서 개최됩니다. 공식 자료에 따르면 올해 CoRL에는 25개국 199편의 논문이 선정됐다. 인기 있는 주제로는 운영, 강화 학습 등이 있습니다. CoRL은 AAAI, CVPR 등 대규모 AI 학술대회에 비해 규모는 작지만, 올해 대형 모델, 체화지능, 휴머노이드 로봇 등 개념의 인기가 높아지면서 주목할만한 관련 연구도 이번 CoRL 컨퍼런스에서 발표될 예정이다.
현재 CoRL 2023에서는 최우수 논문상, 최우수 학생 논문상, 최우수 시스템 논문상 등을 공식 발표했습니다. 다음으로 수상논문을 소개해드리겠습니다.
연구 개요: 현재 이미지 모델의 자기 감독 학습 언어 지도 학습에는 풍부한 글로벌 지식이 통합되어 있으며 이는 모델의 일반화 능력에 매우 중요합니다. 그러나 이미지 특징에는 2차원 정보만 포함됩니다. 우리는 로봇공학 작업에서 실제 3차원 물체의 기하학을 이해하는 것이 매우 중요하다는 것을 배웠습니다
이 연구는 DFF(Distilled Feature Field)를 사용하여 정밀한 3차원 기하학과 결합됩니다. 로봇이 2D 기본 모델의 풍부한 시각적 및 언어 사전을 활용하여 언어 안내 작업을 완료할 수 있도록 2D 기본 모델의 풍부한 의미론
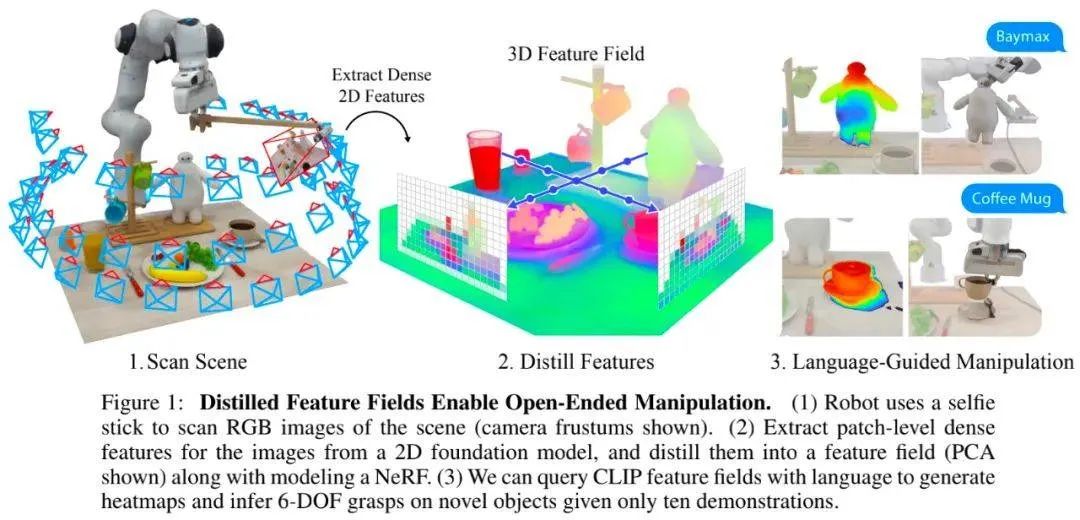
구체적으로, 이 연구에서는 6- DOF 파악 및 배치가 제안되며, 강력한 공간적 및 의미론적 사전 지식을 사용하여 보이지 않는 객체로 일반화됩니다. 시각적 언어 모델 CLIP에서 추출한 기능을 사용하여 이 연구는 새로운 객체에 대해 작동하기 위한 개방형 자연어 명령을 제안하고 이 방법이 보이지 않는 표현과 새로운 객체로 일반화하는 능력을 보여줍니다.
이 논문의 두 공동 저자는 CSAIL "Embodied Intelligence" 팀의 멤버인 William Shen과 Yang Ge입니다. Yang Ge는 2023 CSAIL Embodied Intelligence Symposium의 공동 주최자입니다.
"Heart of the Machine"에서 이 연구를 자세히 소개했다는 것을 알게 되었습니다. "로봇은 대형 모델에서 얼마나 강력하게 지원됩니까? MIT CSAIL&IAIFI는 자연어를 사용하여 로봇이 물체를 잡도록 안내합니다"
대형 언어 모델(LLM)은 특히 로봇공학 분야에서 폭넓은 활용 가능성을 지닌 기술입니다. 그러나 LLM은 단계별 계획 및 상식 추론에 큰 잠재력을 보여 주지만 일부 착각 문제도 겪고 있습니다
이를 기반으로 본 연구에서는 불확실성을 기반으로 한 측정 및 정렬을 위한 새로운 프레임워크인 KnowNo를 제안합니다. LLM 플래너에서. 이를 통해 LLM은 어떤 정보가 알려지지 않았는지 파악하고 필요할 때 도움을 요청할 수 있습니다.
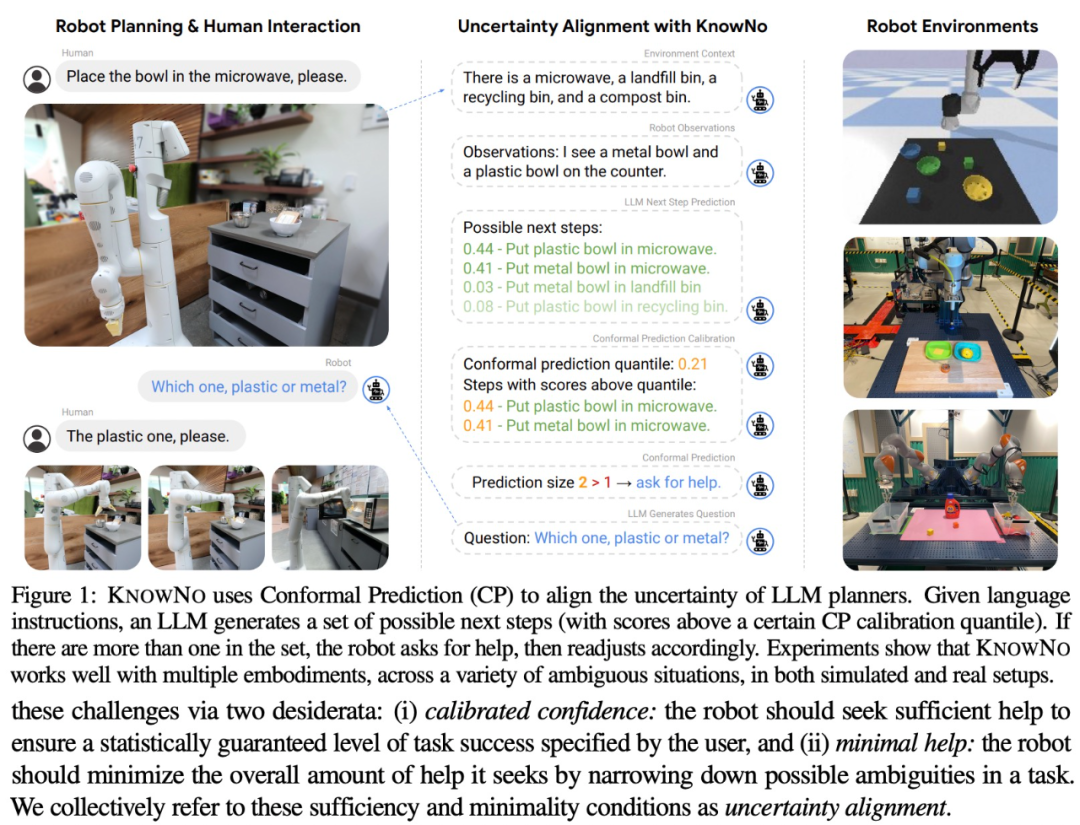
KnowNo는 작업 완료에 대한 통계적 보장을 제공하고 다단계 계획 작업에서 사람의 개입을 최소화할 수 있는 등각 예측 이론을 기반으로 합니다.
이 연구는 다양한 시뮬레이션 및 실제에 대해 수행되었습니다. 로봇 실험에서 KnowNo는 다양한 불확실성 작업 모드(공간적 불확실성, 수치적 불확실성 등 포함)로 테스트되었습니다. 실험 결과에 따르면 KnowNo는 효율성과 자율성을 향상시키는 데 탁월한 성능을 발휘하고 기준을 능가하며 안전하고 신뢰할 수 있는 것으로 나타났습니다. KnowNo는 모델 미세 조정 없이 LLM에서 직접 사용할 수 있어 모델 불확실성에 대한 효과적인 경량 솔루션을 제공하고 기본 모델의 증가하는 기능을 보완합니다.
논문 소개: 인간은 다양한 도구를 만들고 사용하는 데 능숙하며, 그러나 로봇의 경우 도구를 효과적으로 사용하고 해당 개체에 대한 작업을 완료하는 방법을 이해하는 것은 여전히 큰 과제입니다. 본 연구에서는 다양한 도구를 통해 탄소성 물체를 감지, 모델링 및 조작할 수 있는 RoboCook이라는 지능형 로봇 시스템을 구축했습니다. RoboCook은 그래프 신경망(GNN) 모델 도구-객체 상호 작용을 사용하여 포인트 클라우드 장면 표현을 사용합니다. 도구 분류와 자체 감독 정책 학습을 결합하여 실행 계획을 개발합니다.
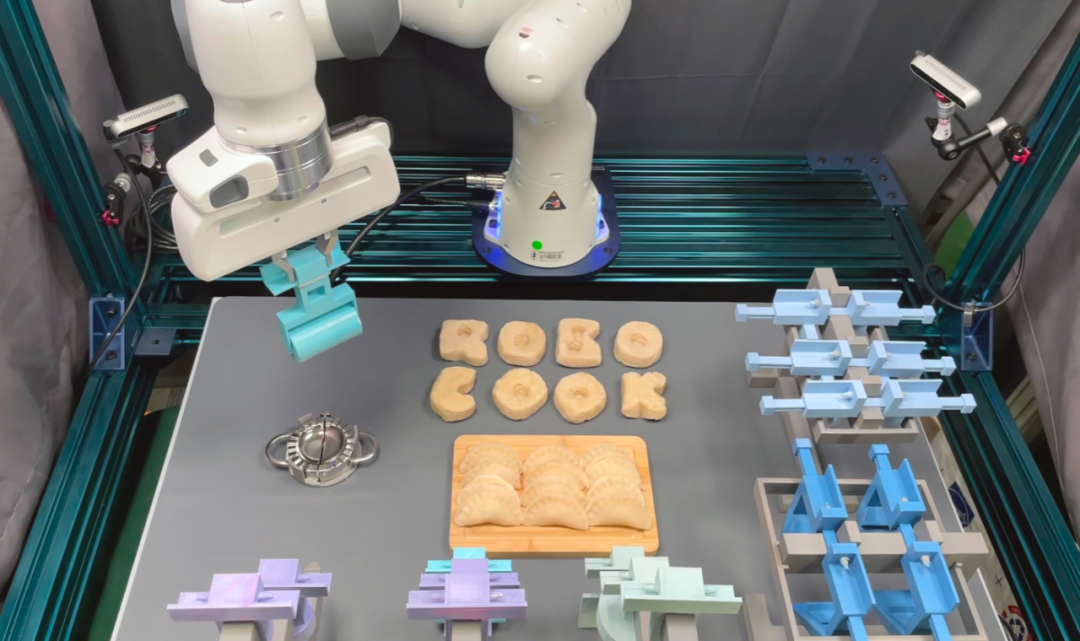 이 연구는 각 도구에 대한 단 20분의 실제 상호 작용 데이터를 사용하여 RoboCook이 로봇 팔을 학습하고 조작하여 만두 만들기, 알파벳 쿠키 등
이 연구는 각 도구에 대한 단 20분의 실제 상호 작용 데이터를 사용하여 RoboCook이 로봇 팔을 학습하고 조작하여 만두 만들기, 알파벳 쿠키 등
실험 결과에 따르면 로보쿡의 성능은 기존 SOTA 방식보다 월등히 우수하고, 심한 외부 간섭에도 안정성을 발휘할 수 있으며, 다양한 소재에 대한 적응성도 더 우수합니다
가치가 있습니다. 이 논문의 공동 저자는 스탠포드 대학교 박사 과정 학생인 Haochen Shi와 전 스탠포드 대학교 박사후 연구원이자 현재 칭화 대학교 학제 간 정보 과학 연구소의 조교수인 Huazhe Xu라고 언급했습니다. 논문의 저자는 스탠포드 대학의 조교수인 Yao Ban Alumnus Wu Jiajun입니다.
최종 수상작 목록이 발표되었습니다
위 내용은 중국팀이 최우수 논문상과 최우수 시스템 논문상을 수상하며 CoRL 연구 결과가 발표됐다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



