


Exécutez avec une maîtrise de niveau expert de CARLA v2.
Titre : Think2Drive : Apprentissage par renforcement efficace en pensant dans un modèle mondial latent pour une conduite autonome quasi-réaliste (dans CARLA-v2)
Affiliation de l'auteur : Université Jiao Tong de Shanghai
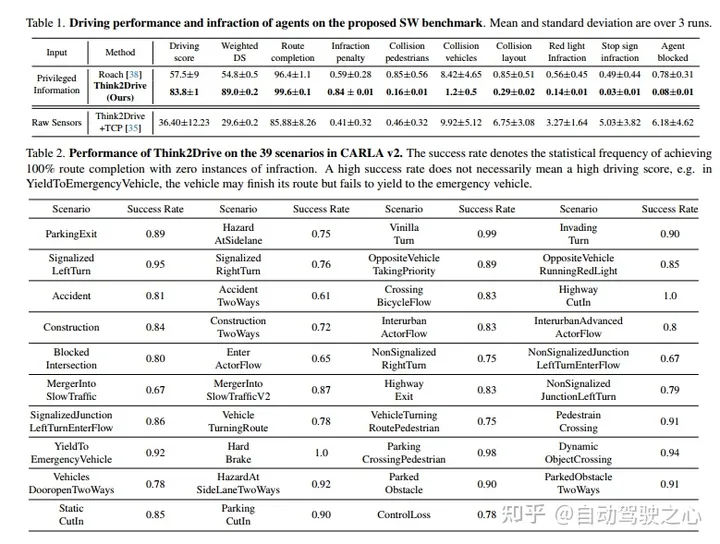
Conduite autonome (AD) dans le monde réel, en particulier dans villes La conduite automobile implique de nombreux cas de figure. Le simulateur AD CARLA v2 récemment publié ajoute 39 événements courants aux scénarios de conduite et fournit une plate-forme de test plus proche de la réalité que CARLA v1. Cela pose de nouveaux défis à la communauté. Jusqu'à présent, aucune littérature n'a fait état d'un quelconque succès avec les nouveaux scénarios de CARLA v2, car la plupart des travaux existants doivent s'appuyer sur des règles de planification spécifiques, mais ils ne peuvent pas couvrir CARLA v2 dans des situations plus complexes. . Ce travail forme activement et directement un planificateur, dans l'espoir d'être capable de gérer les cas d'angle de manière flexible et efficace, et estime que c'est aussi l'orientation future d'AD. Au meilleur de nos connaissances, nous développons la première méthode d'apprentissage par renforcement basée sur un modèle, nommée Think2Drive, pour AD, avec un modèle mondial pour apprendre les transitions de l'environnement, qui agit ensuite comme un simulateur neuronal pour former le planificateur. Ce paradigme améliore considérablement l'efficacité de la formation grâce à l'espace d'états de faible dimension et au calcul parallèle des tenseurs dans le modèle mondial.
En conséquence, Think2Drive a pu fonctionner à un niveau expert avec CARLA v2 après 3 jours de formation sur un seul GPU A6000. À notre connaissance, aucun succès (achèvement de l'itinéraire à 100 %) n'a été signalé pour CARLA v2. à ce jour. ). CornerCase-Repository est également proposé, un benchmark qui prend en charge l'évaluation des modèles de conduite à travers des scénarios. De plus, une nouvelle mesure équilibrée est proposée pour évaluer les performances, y compris l'itinéraire parcouru, le nombre d'infractions et la densité des scènes, afin que les scores de conduite puissent fournir plus d'informations sur les performances de conduite réelles.
Bienvenue dans notre entrepôt ! Il couvre de nombreux domaines techniques, parmi lesquels le BEV, la fusion multimodale, la détection d'occupation de véhicules, la perception visuelle radar à ondes millimétriques, la détection de lignes de voie et la perception 3D, etc. Nous partageons également des critiques et des articles sur les cartes en ligne, l'étalonnage multi-capteurs, Nerf, les modèles à grande échelle, le contrôle de la planification et la prédiction de trajectoire. J'espère que vous aimez notre contenu, et n'oubliez pas de suivre et de suivre notre entrepôt pour des informations plus intéressantes ! Merci pour votre soutien!
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



