


Terlalu banyak muslihat untuk anjing robot——
Tetapi hari iniSaya masih kagum.
Keputusan terkini daripada CMU membolehkan anjing belajar terus:
lompat tinggi dua kali panjang badan, lompat jauh, dirian tangan dan juga diri tangan menuruni tangga
Tak banyak nak cakap, cuma tunjukkan gambar sahaja. alaminya Gelombang:

△ Ini lompat jauh

△ Ini lompat tinggi
△ Handstand
🜎 yang perlu △Berdiri ke bawah tangga
yang perlu △Berdiri ke bawah tangga
Saya perlu katakan, terutamanya "perjuangan" di bahagian lompat tinggi membuatkan anjing itu sangat bersemangat.
Selain daripada operasi ini, CMU juga mengeluarkan beberapa video parkour,
yang sepenuhnya autonomi. Memang menyegarkan perasaan untuk memijak permatang, melepasi celah, dan menyeberangi cerun
 Walaupun terdapat beberapa "kesilapan" di tengah, ia tidak akan menjejaskan kemajuan segeranya
Walaupun terdapat beberapa "kesilapan" di tengah, ia tidak akan menjejaskan kemajuan segeranya
 ketawa Tikus pun mengatur
ketawa Tikus pun mengatur
ujian tekanan, dan hasilnya sudah tentu "lulus"~
 Perkara yang paling menakjubkan ialah, menurut CMU, semua operasi ekstrem di atas diselesaikan oleh satu rangkaian saraf
Perkara yang paling menakjubkan ialah, menurut CMU, semua operasi ekstrem di atas diselesaikan oleh satu rangkaian saraf
Abang LeCun terpaksa memberikan ibu jari selepas mendengarnya.
Bagaimana untuk memperhalusi jiwa sedemikian? 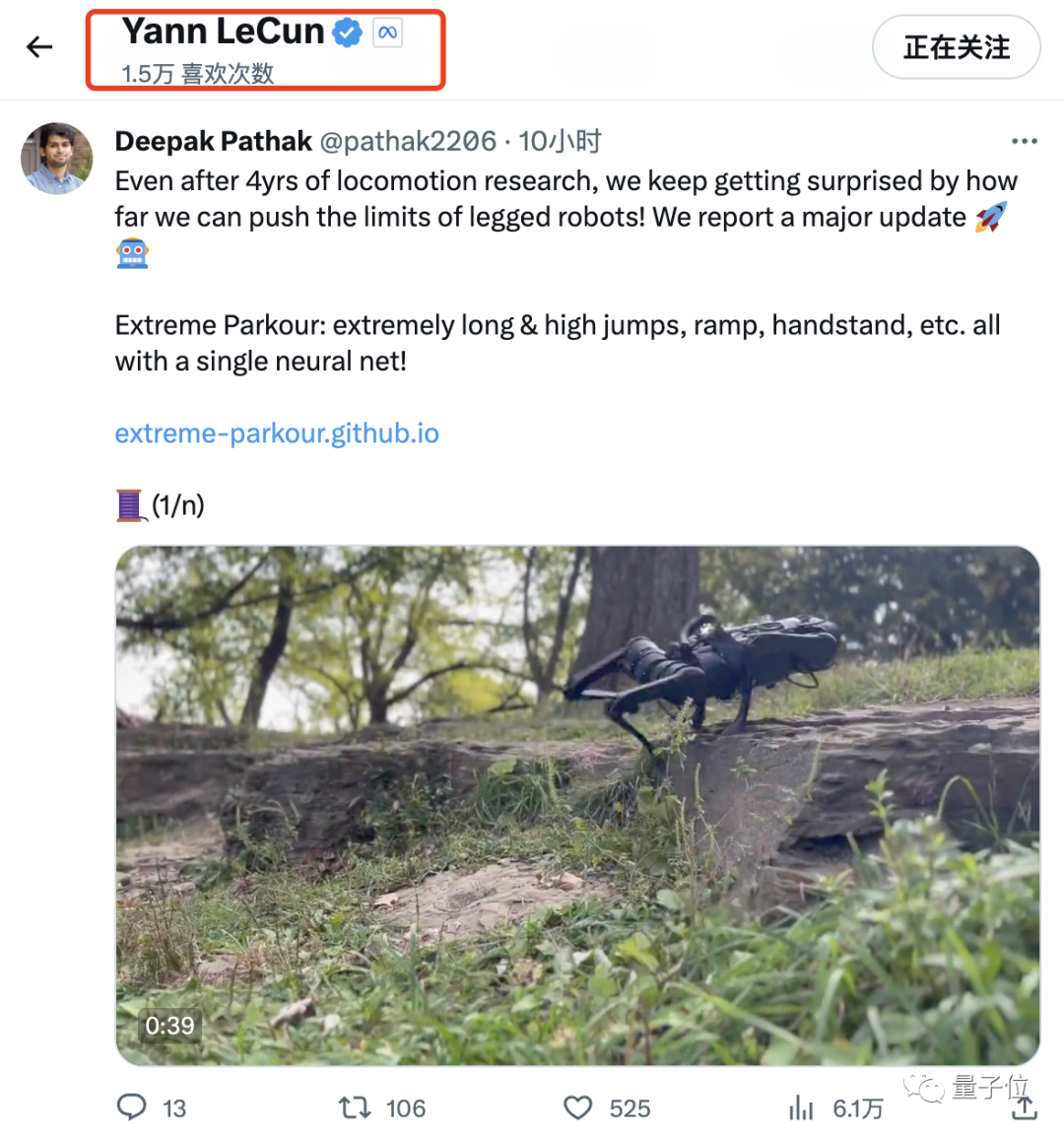
untuk mencapai kawalan kaki yang tepat dan cabaran untuk memaksimumkan kelebihan mekanikal. Antaranya, Gym digunakan untuk simulator
Tambahan pula dirian tangan. Jelas sekali, berjalan dengan dua kaki adalah lebih sukar daripada berjalan dengan empat Walau bagaimanapun, anjing robot Universiti Carnegie Mellon menggunakan pendekatan asas yang sama untuk menyelesaikan kedua-dua tugas pada masa yang sama, malah mampu berjalan menuruni tangga sambil mengekalkan keadaan TerbalikKetiga, untuk operasi parkour
(fokus kajian ini)
, anjing robot mesti menentukan hala tujunya sendiri melalui koordinasi "otot mata" yang tepat, dan bukannya mematuhi perintah manusia. Sebagai contoh, apabila melepasi dua tanjakan berturut-turut, ia perlu melompat ke atas tanjakan pada sudut yang sangat spesifik dan kemudian segera menukar arah
Untuk mempelajari arah yang betul ini, CMU menggunakan
MTS
(( Murid Guru Campuran) sistem untuk mengajar anjing robot. Sistem hanya akan mengguna pakainya jika arah yang diramalkan menghampiri nilai sebenarSecara khusus, sistem terbahagi kepada
dua peringkat:Pada peringkat pertama, RL mula-mula digunakan untuk mempelajari strategi pergerakan . Proses ini boleh mengakses beberapa maklumat istimewa Sebagai tambahan kepada parameter persekitaran dan titik imbasan (scandots) , CMU juga menyediakan beberapa
titik tanda (titik jalan) sesuai untuk anjing robot, dengan tujuan untuk membimbing anjing. arah umum. Kemudian, Regularized Online Adaptation (Regularized Online Adaptation, ROA) digunakan untuk melatih penilai untuk memulihkan maklumat alam sekitar daripada sejarah pemerhatian. Pada peringkat kedua, strategi diekstrak daripada titik imbasan (scandots) , dan sistem akan secara autonomi memutuskan cara untuk bergerak ke hadapan berdasarkan strategi dan maklumat mendalam, sekali gus mengeluarkan arahan motor dengan tangkas. Keseluruhan proses adalah seperti "guru mengajar, pelajar belajar dengan analogi" Selain sistem ini, memandangkan parkour memerlukan pelbagai tindakan yang berbeza untuk merentas halangan, ia juga penting untuk mereka bentuk fungsi ganjaran untuk setiap halangan. Di sini, penulis memilih untuk merumuskan fungsi ganjaran produk dalaman yang bersatu dan ringkas untuk semua tugasan. Ia boleh menjana pelbagai ganjaran secara automatik dan boleh menyesuaikan diri sepenuhnya dengan pelbagai bentuk rupa bumi Tanpanya, prestasi anjing itu akan menjadi seperti ini: Akhir sekali, CMU juga dicadangkan kaedah penyulingan dwi-penyulingan baharu arahan gerakan tangkas dan arah hadapan yang turun naik dengan pantas daripada imej kedalaman. Begitu juga, tanpanya, anjing itu berkelakuan seperti pemabuk: Bukankah ia menarik? Jangan risau: Semua keputusan di atas, CMU (Tengok tarikh ini, masih panas). Pengenalan kepada pengarang di penghujung : Seseorang bernama Xuxin Cheng Kerja ini telah disiapkan semasa dia seorang pelajar siswazah di CMU Dia kini seorang pelajar kedoktoran di University of California, San Diego , dan penyelianya ialah Wang Xiaolong Yang lain bernama Shi Kexin, sarjana Pelawat di Institut Robotik CMU. Dia lulus dari Universiti Xi'an Jiaotong dengan ijazah sarjana muda. 

 Selepas langkah di atas, anjing itu akhirnya mempelajari parkour autonomi baharu dan dapat menyelesaikan beberapa tindakan yang sukar
Selepas langkah di atas, anjing itu akhirnya mempelajari parkour autonomi baharu dan dapat menyelesaikan beberapa tindakan yang sukar Dalam masa yang sama, kertas kerja ini juga telah dikeluarkan. Anda boleh mendapatkan
Dalam masa yang sama, kertas kerja ini juga telah dikeluarkan. Anda boleh mendapatkan Penyelidikan ini telah disiapkan oleh Carnegie Mellon University, dan seramai empat pengarang mengambil bahagian
 Antaranya
Antaranya
Atas ialah kandungan terperinci Anjing robot CMU, berdiri terbalik dan turun ke bawah! Keluaran adalah sumber terbuka. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 aksara melarikan diri JavaScript
aksara melarikan diri JavaScript
 Bagaimana untuk membatalkan pembaharuan automatik Kad Simpanan Wang Taobao
Bagaimana untuk membatalkan pembaharuan automatik Kad Simpanan Wang Taobao
 Cara menggunakan fungsi penyahkod
Cara menggunakan fungsi penyahkod
 Kaedah pengesanan pautan mati laman web
Kaedah pengesanan pautan mati laman web
 Apakah maksud Jingdong plus?
Apakah maksud Jingdong plus?
 Bahasa Komputer
Bahasa Komputer
 Bagaimana untuk menutup port 135
Bagaimana untuk menutup port 135
 Apakah kelebihan rangka kerja Spring Boot?
Apakah kelebihan rangka kerja Spring Boot?








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



