


CARLA v2 ではエキスパートレベルの習熟度で実行できます。
タイトル: Think2Drive: 準現実的な自動運転のための潜在世界モデルで考えることによる効率的な強化学習 (CARLA-v2 内)
著者の所属: 上海交通大学
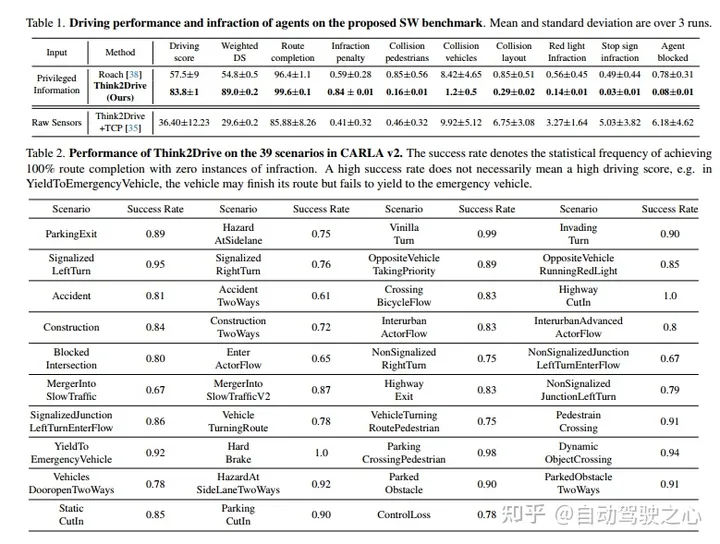
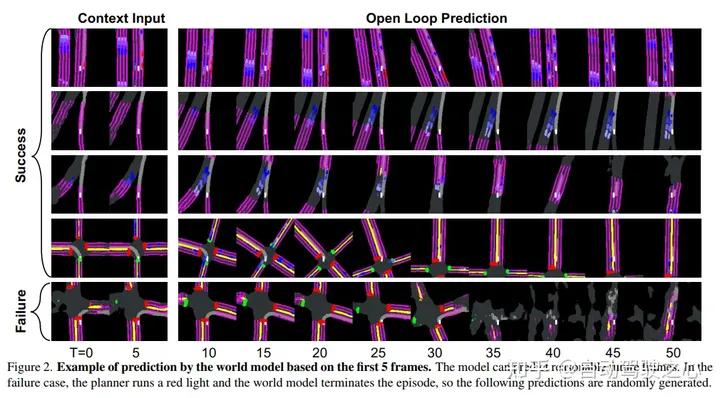
現実 世界の自動運転 (AD)、特に都市部での運転には、多くの特殊なケースが含まれます。最近リリースされた AD シミュレーター CARLA v2 は、運転シナリオに 39 の共通イベントを追加し、CARLA v1 よりも現実に近いテスト プラットフォームを提供します。これはコミュニティに新たな課題をもたらします。既存の作業のほとんどは計画のために特定のルールに依存する必要があるため、これまでのところ、CARLA v2 の新しいシナリオでの成功を報告した文献はありませんが、より複雑な状況での CARLA v2 をカバーすることはできません。 。この取り組みでは、プランナーを積極的かつ直接的に育成し、特殊なケースに柔軟かつ効果的に対応できるようにすることを目指しており、これが AD の将来の方向性でもあると考えています。私たちの知る限り、私たちは、環境の遷移を学習するための世界モデルを備えた、Think2Drive という AD 用の最初のモデルベースの強化学習手法を開発しました。この手法は、プランナーをトレーニングするためのニューラル シミュレーターとして機能します。このパラダイムは、ワールド モデルの低次元状態空間とテンソルの並列計算により、トレーニング効率を大幅に向上させます。
その結果、単一の A6000 GPU で 3 日間のトレーニングを行った後、Think2Drive は CARLA v2 でエキスパート レベルの習熟度で実行できました。私たちの知る限り、CARLA v2 での成功はこれまで報告されていません。 (ルートが 100% 完了)。シナリオを通じた運転モデルの評価をサポートするベンチマークである CornerCase-Repository も提案されています。さらに、ルートの完了、違反の数、シーンの密度などのパフォーマンスを評価するための新しいバランスの取れた指標が提案されているため、運転スコアから実際の運転パフォーマンスに関するより多くの情報が得られます。
以上がThink2Drive: 自動運転のための初のモデルベース RL 手法 (上海交通大学)の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



