


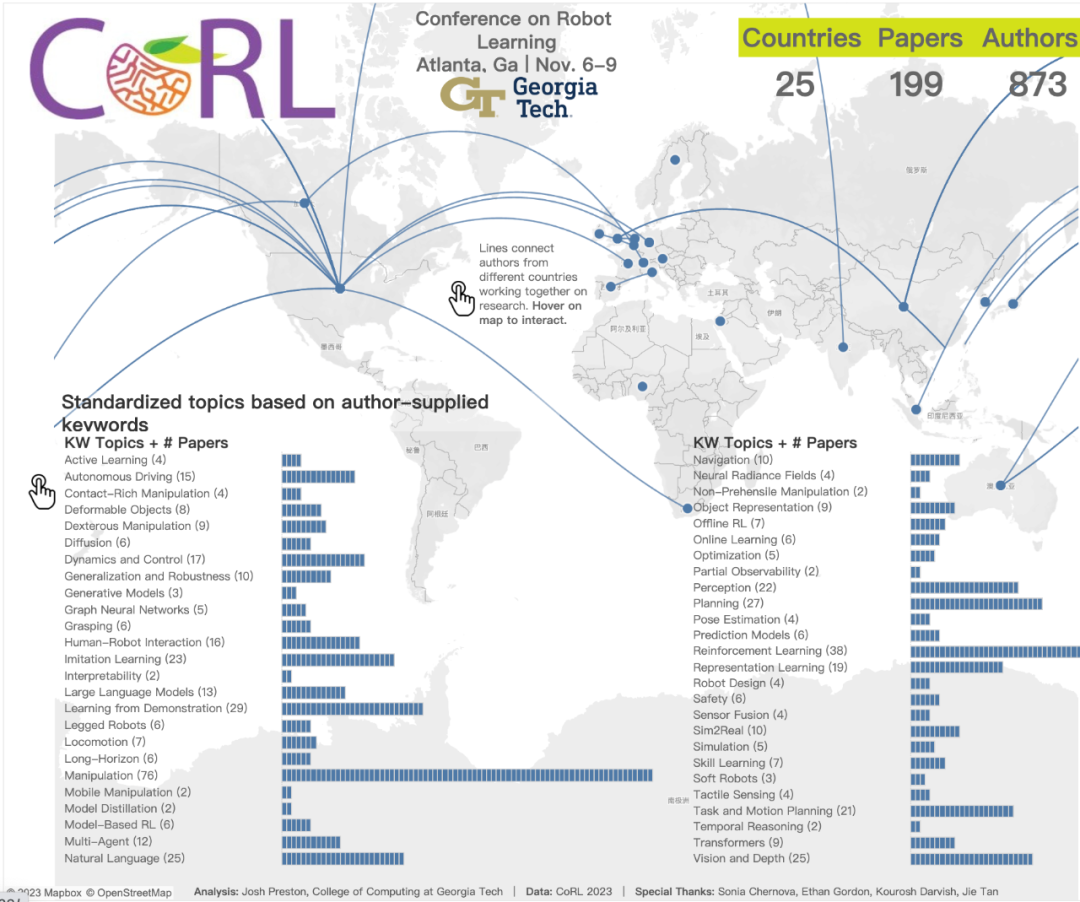
2017 年に初めて開催されて以来、CoRL はロボット工学と機械学習の交差点における世界トップクラスの学術会議の 1 つになりました。 CoRL は、ロボット学習研究のための単一テーマのカンファレンスであり、理論と応用を含むロボット工学、機械学習、制御などの複数のトピックをカバーします
2023 年の CoRL カンファレンスは 11 月に開催されます。は6日から9日まで米国アトランタで開催される。公式データによると、今年は25か国から199本の論文がCoRLに選ばれた。人気のあるトピックには、演算、強化学習などが含まれます。 CoRLはAAAIやCVPRなどの大規模なAI学会に比べて規模は小さいですが、今年は大型モデル、身体化知能、ヒューマノイドロボットなどの概念の人気が高まる中、CoRLカンファレンスでも関連する注目すべき研究が発表されます。 .
現在、CoRL 2023 関係者は、Best Paper Award、Best Student Paper Award、Best System Paper Award およびその他の賞を発表しています。次に、受賞論文を紹介します。
# 研究概要: 現在、画像モデルの自己教師あり学習と言語教師あり学習には、モデルの一般化能力にとって非常に重要な、豊富なグローバル知識が組み込まれています。ただし、画像の特徴には 2 次元の情報しか含まれません。ロボット工学のタスクでは、現実世界の 3 次元オブジェクトの幾何学形状を理解することが非常に重要であることがわかりました。
蒸留特徴フィールド (DFF) を使用することで、この研究では次のことが行われます。 2D ベース モデルからの豊富なセマンティクスを備えた正確な 3D ジオメトリにより、ロボットが 2D ベース モデル内の豊富なビジュアルおよび言語事前情報を活用して言語ガイド付き操作を完了できるようになります
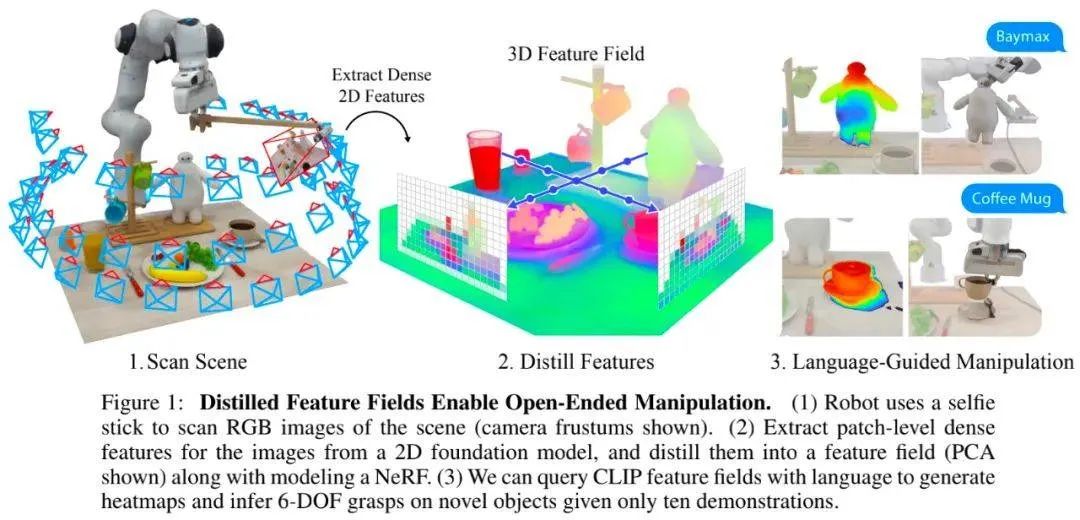
具体的には、この研究は、6-DOF のグラブと配置のための数ショット学習方法を提案し、強力な空間的および意味論的な事前分布を活用して、目に見えないオブジェクトに一般化します。この研究では、視覚言語モデル CLIP から抽出された特徴を使用して、新しいオブジェクトを操作するためのオープンエンドの自然言語命令を提案し、この方法が目に見えない表現や新しいオブジェクトに一般化できる能力を実証しています。
この論文の 2 人の共著者は、CSAIL "Embodied Intelligence" チームのメンバーである William Shen と Yang Ge です。Yang Ge は、2023 CSAIL Embodied Intelligence の共著者です。シンポジウム主催者。
この研究については「Heart of the Machine」で詳しく紹介されていると知りましたので、「ロボットは大きなモデルでどのくらい強力にサポートされているのか? MIT CSAIL&IAIFI は自然言語を使用してロボットに把握を誘導する」をご覧ください。オブジェクト 》
大規模言語モデル (LLM) は、特にロボット工学の分野で幅広い応用が期待できるテクノロジです。ただし、LLM は段階的な計画と常識的な推論において大きな可能性を示しますが、いくつかの錯覚の問題にも悩まされます
これに基づいて、この研究は新しいフレームワークを提案します。 — KnowNo、LLM ベースのプランナーの不確実性を測定および調整します。これにより、LLM はどのような情報が不明であるかを認識し、必要なときに助けを求めることができます。
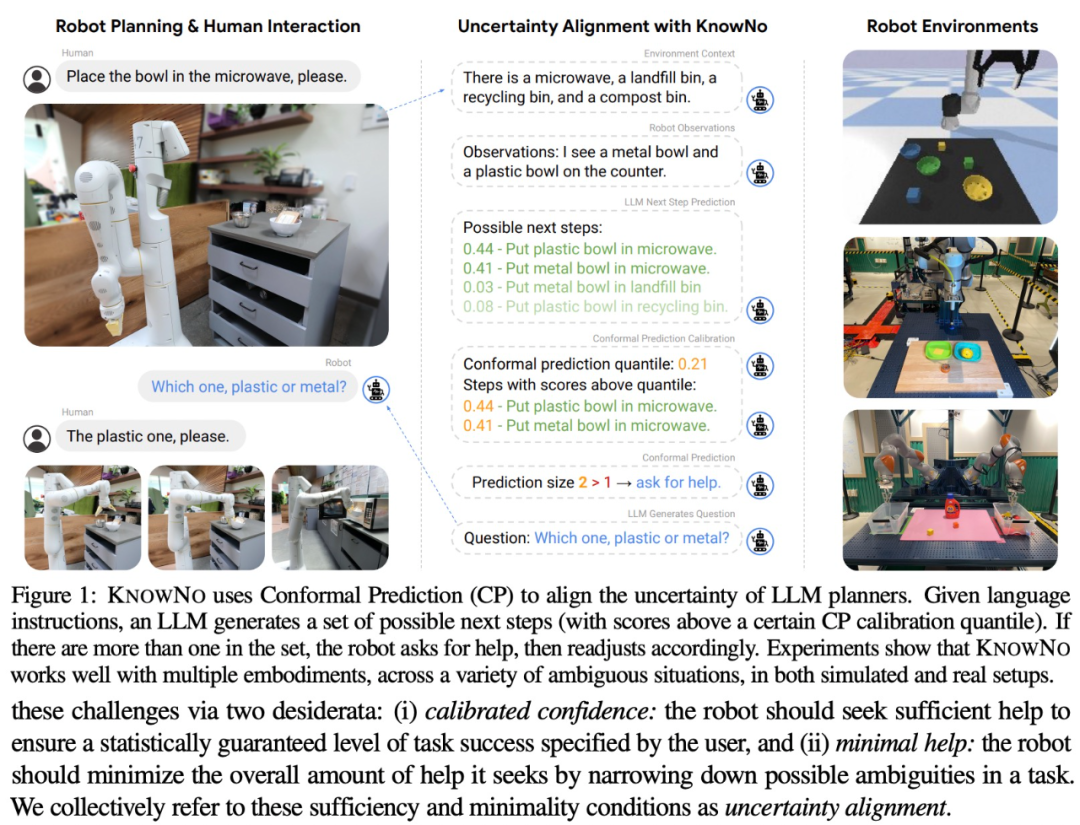
KnowNo は等角予測理論に基づいており、タスクの完了を統計的に保証し、複数ステップの計画タスクにおける人間の介入を最小限に抑えることができます。 この研究では、さまざまなシミュレーションおよび実際のロボット実験において、不確実なタスク (空間的不確実性、数値的不確実性などを含む) のさまざまなモードで KnowNo をテストしました。実験結果は、KnowNo が効率と自律性の向上に優れ、ベースラインを上回り、安全で信頼できることを示しています。 KnowNo は、モデルの微調整を行わずに LLM で直接使用でき、モデルの不確実性に対する効果的な軽量ソリューションを提供し、基礎となるモデルの向上する機能を補完します。
最優秀システム論文
 ##論文: RoboCook: Long-Horizon 弾塑性オブジェクト操作多様なツールを使用して
##論文: RoboCook: Long-Horizon 弾塑性オブジェクト操作多様なツールを使用して
RoboCook は点群シーンを使用します表現、グラフ ニューラル ネットワーク (GNN) を活用してツールとオブジェクトの相互作用をモデル化し、ツール分類と自己教師ありポリシー学習を組み合わせてアクション プランを開発します。
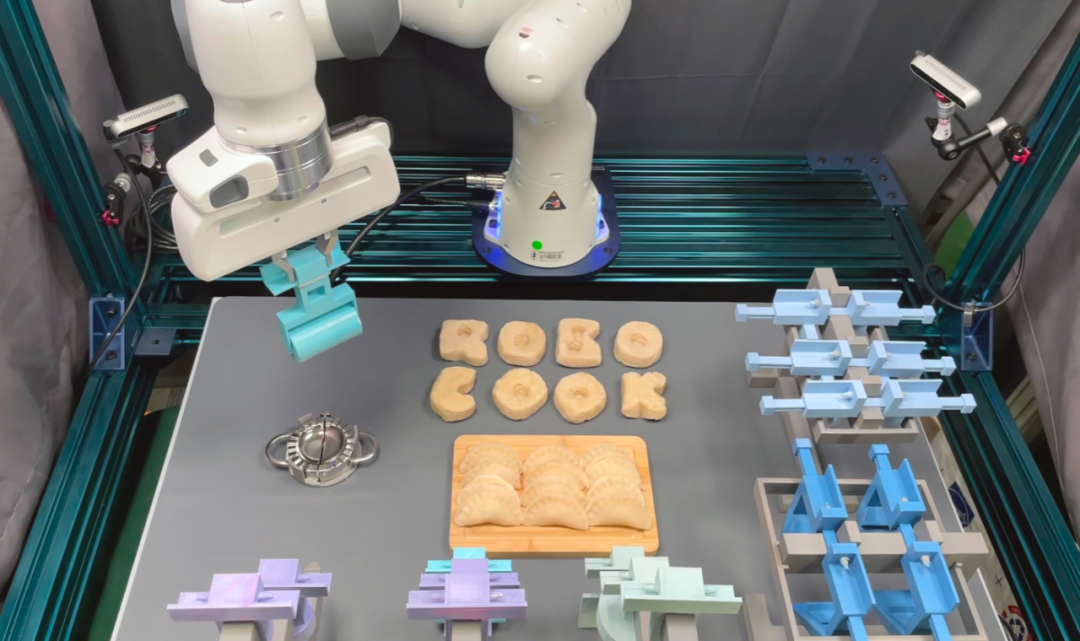
実験結果によると、RoboCook のパフォーマンスは既存の SOTA 手法よりも大幅に優れており、厳しい外部干渉に直面しても安定性を示し、さまざまな材料に適応できます。この論文の共著者は、スタンフォード大学の博士課程の学生であり、スタンフォード大学の元博士研究員であり、現在は研究員である Haochen Shi であることは言及する価値があります。清華大学の専門研究員、情報科学研究所の徐華哲助教授、そして論文の著者の一人である姚嘉軍氏はヤオクラスの卒業生でスタンフォード大学の助教授である。
受賞論文の最終リストが発表されました
以上が中国チームが最優秀論文賞と最優秀システム論文賞を受賞し、CoRLの研究成果が発表されました。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



