


人工知能が、今度はドローンレースで人間の世界チャンピオンを再び破りました。
この主要な成果は、スイスのチューリッヒ大学のエンジニアのチームによって雑誌「Nature」と「Science Robotics」に掲載されました。 2011 年に AI ドローンと初めて対戦した後、スウィフトが登場するまで、自律型ドローンは人間のパイロットに勝つことはできませんでした。スウィフトは、2019年ドローンレーシングリーグ世界チャンピオンのアレックス・ヴァノーバー、2度のMultiGPインターナショナルオープンチャンピオンのトーマス・ビットマッタ、3度のスイスナショナルチャンピオンのマービン・シェイパーなど、世界チャンピオンの人間プレイヤーを破りました。
仮想領域では、人工知能がチェス、チェッカー、囲碁、スタークラフトなどのゲームで人間に勝利しました。そして今、初めて物理的な挑戦で人間を倒すことに成功しました
 「Swift」ドローンの成功の秘密は、ドローンのルートと速度を最適化できる強力な人工ニューラル ネットワークにあります。搭載カメラを通じて環境の詳細をリアルタイムで収集し、ドローンに正確な誘導を提供する一方、人間のパイロットはヘッドフォンに送信されるビデオ信号に依存して「一人称視点」を体験します。
「Swift」ドローンの成功の秘密は、ドローンのルートと速度を最適化できる強力な人工ニューラル ネットワークにあります。搭載カメラを通じて環境の詳細をリアルタイムで収集し、ドローンに正確な誘導を提供する一方、人間のパイロットはヘッドフォンに送信されるビデオ信号に依存して「一人称視点」を体験します。
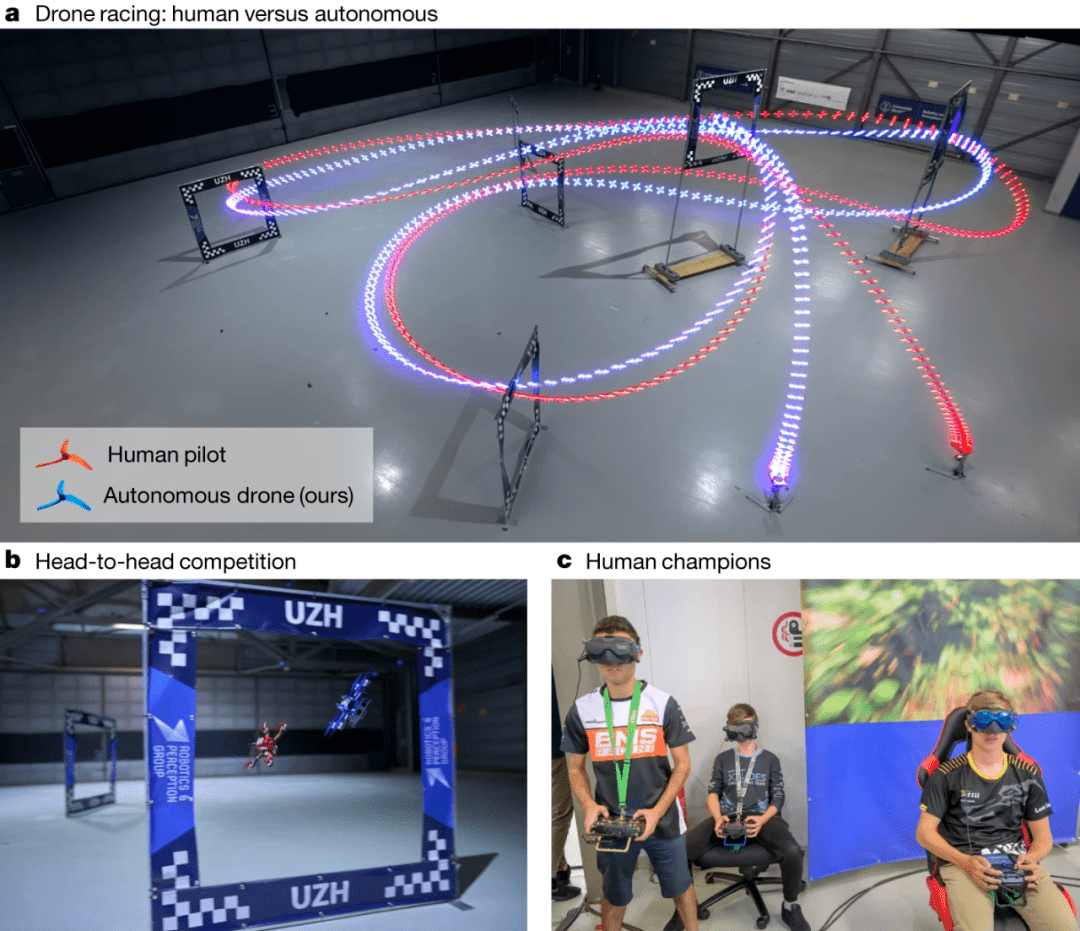
このドローン レースでは、人間のオペレーターがオンボード カメラを介して 3D トラックでドローンを制御します。 Swift システムの革新的な点は、ドローンのステータスをコマンドにマッピングして、推力と回転速度を調整できることです。この成果は、モバイルロボット工学とマシンインテリジェンスの分野における画期的な成果です。

Swift は、搭載センサーとコンピューティングのみを使用して自律制御されるクアッドコプターです。航空機は 2 つの主要なモジュールで構成されています:
知覚システムは、高次元の視覚情報と慣性情報を低次元の表現に変換します;
研究結果は、これらの経験的ノイズ モデルが、制御戦略をシミュレーションから現実にうまく移す上で積極的な役割を果たすことを示しています
具体的には、Swift は航空機のセンサー読み取り値を制御コマンドに変換します。この変換プロセスには 2 つの部分が含まれます:
(1) 高次元の視覚情報と慣性情報をタスク固有の低次元エンコードに洗練するための観察戦略;
(2) 制御戦略、エンコーディングをドローン コマンドに変換します。
スウィフトが記録した 10 件の損失のうち、40% は対戦相手との衝突によるもの、40% は競技ゲートとの衝突によるもの、20% は人間が制御するドローンよりも遅いことが原因でした。全体として、スウィフトは人間が制御するドローンとのレースで最も多くの勝利を収め、また人間が制御するドローンのベストタイム(A. Vanover)を 6 秒上回り、最速のレース記録も樹立しました。
Swift は全体的に人間が制御するすべてのドローンよりも速かったものの、トラックのすべてのセグメントで速かったわけではありません。
研究チームによる慎重な分析により、スウィフトは離陸時の反応時間が短く、人間のパイロットよりも平均して 120 ミリ秒早く離陸し、またスウィフトはより速く加速し、より高い速度で最初の競技ゲートに入ることが判明しました。タイトなターンでは、スイフトの動きがよりタイトになります。
研究チームはまた、Swift は人間のオペレーターよりも長い時間スケールで軌道を最適化するという仮説を提案しました。モデルフリーの強化学習は、長期的な報酬を最適化することで実現できることが知られています。対照的に、人間のオペレーターは動きを計画するための時間スケールが短く、将来の競争ゲートはせいぜい 1 つしか予測できません。
以上がSwift ドローンは AI テクノロジーを使用して FPV イベントで人間のトッププレイヤーを破りましたの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。





























![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



