


科学技術日報がこのニュースを報じました
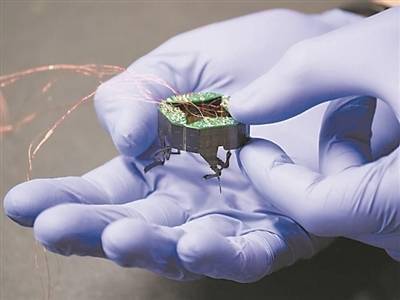
CLARI は卓球ボールよりも軽く、手のひらに数個収まるほどです。
画像出典: コロラド大学ボルダー校
30日の「アドバンスト・インテリジェント・システム」誌の報道によると、コロラド大学ボルダー校の技術者チームは、形状を変えて狭い隙間を通り抜けることができる小型の変形可能なロボット、CLARIを実証した。そのデザインは昆虫の世界からインスピレーションを得ており、将来的には新たな方法で大規模災害後の救助活動に役立つ可能性があります。
CLARI の重さは卓球ボールよりも軽く、いくつかのロボットは手のひらに簡単に収まります。 CLARIは周囲が狭くなると四角形から細長い形に変形します。 CLARI には 4 本の足がありますが、エンジニアはその付属物を組み合わせて、巣の上を歩くことができる 8 本足のクモのようなロボットなど、「野生の」うごめくロボットを作成することができます。
CLARI の最も基本的な形状は、4 つの側面と 4 本の脚を持つ正方形のような形です。しかし、CLARIを変えることで、カニのように大きく広がったり、ムカデのように長く伸びたりすることができます。全体として、ロボットは幅約 34 mm の正方形から幅約 21 mm の細長い形状に変形できます。
CLARI の各脚は、独自の回路基板と人間の股関節と同様に脚を前後左右に動かすことができるデュアル アクチュエータを備え、ほぼ独立したロボットとして機能します。理論的には、このモジュール設計により、CLARI ロボットはさまざまな形状を取ることができます。今のところ、CLARI はまだ初期段階にありますが、近い将来、これらの小型ロボットはジェット エンジンの内部や倒壊した建物の瓦礫の中に独立して潜り込むことができるようになるでしょう。
将来の反復では、研究者は CLARI にセンサーを統合し、障害物を検出して応答できるようにする予定です。これにより、複雑な自然環境で木や草の葉などの障害物を「蹴り飛ばす」ことや、岩の間を進み続けることができるようになります。亀裂を通して。
以上が微細なロボットは変形能力を持ち、狭い場所にも柔軟に入り込むことができますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



