


移動式ホーム ロボットの自動化の複雑さを調査し、ユーザーがスムーズに開始できるように制限を克服するためのセットアップ中の特有の課題に焦点を当てます。

前の記事この記事では、April Tag テクノロジーを使用して家庭用ロボットを自動化する方法を説明しました。家庭用ロボットやその他のロボットを自動化する場合の大きな課題は、デバイスのセットアップです。デバイス、電話、モバイル アプリの世界では、通常、デバイスは USB 経由でホスト デバイスに接続され、デバイスは常に電源に接続されています。しかし、ロボットのテストでは、ロボットを動かしながらどのようにテストを行うかという特有の課題が生じます。物理的な有線接続を介してホストデバイスに接続できないためです。では、開封体験をどのように検証すればよいのでしょうか?心配しないでください。これについては、この記事で説明します。
ロボット自動化テストのセットアップ段階のさまざまな課題について簡単に紹介した後、さらに詳しく説明します。さらなる課題の研究
ロボットは移動しているため、ホスト デバイスに物理的に有線接続できません。一部のコンポーネント レベルのテストでは可能ですが、エンドツーエンド (E2E) テストでは不可能です。
すぐに使えるエクスペリエンスは、デバイスが WiFi に接続されていない場合です。新品の場合、ホスト デバイスはデバイスとどのようにやり取りしますか?これは日常のロボット テストで非常に一般的な状況です。
ロボットでエラーや例外が発生した場合、回復操作が必要になります。自動テストの主な目的は、ロボットの潜在的なソフトウェアおよびハードウェアの問題を発見することです。問題が発生した場合、どのように報告してデバイスを回復すればよいですか?
ロボットのバッテリーがもうすぐ切れるので、ロボットを充電するための信頼できる電源が必要です。
同じセットアップを複数の研究室や家庭の環境に拡張することが非常に重要です。これは、1 つの環境でボットの署名やテストだけを行うことはできないためです。これらの問題に時系列で対処してみましょう。これは次のように書き換えることができます: これらの問題を時系列で解決しましょう
Raspberry Pi Default Robot の使用
Raspberry Pi プリセット ロボットの使用
 すぐに使えるエクスペリエンスのユースケースを解決する
すぐに使えるエクスペリエンスのユースケースを解決する
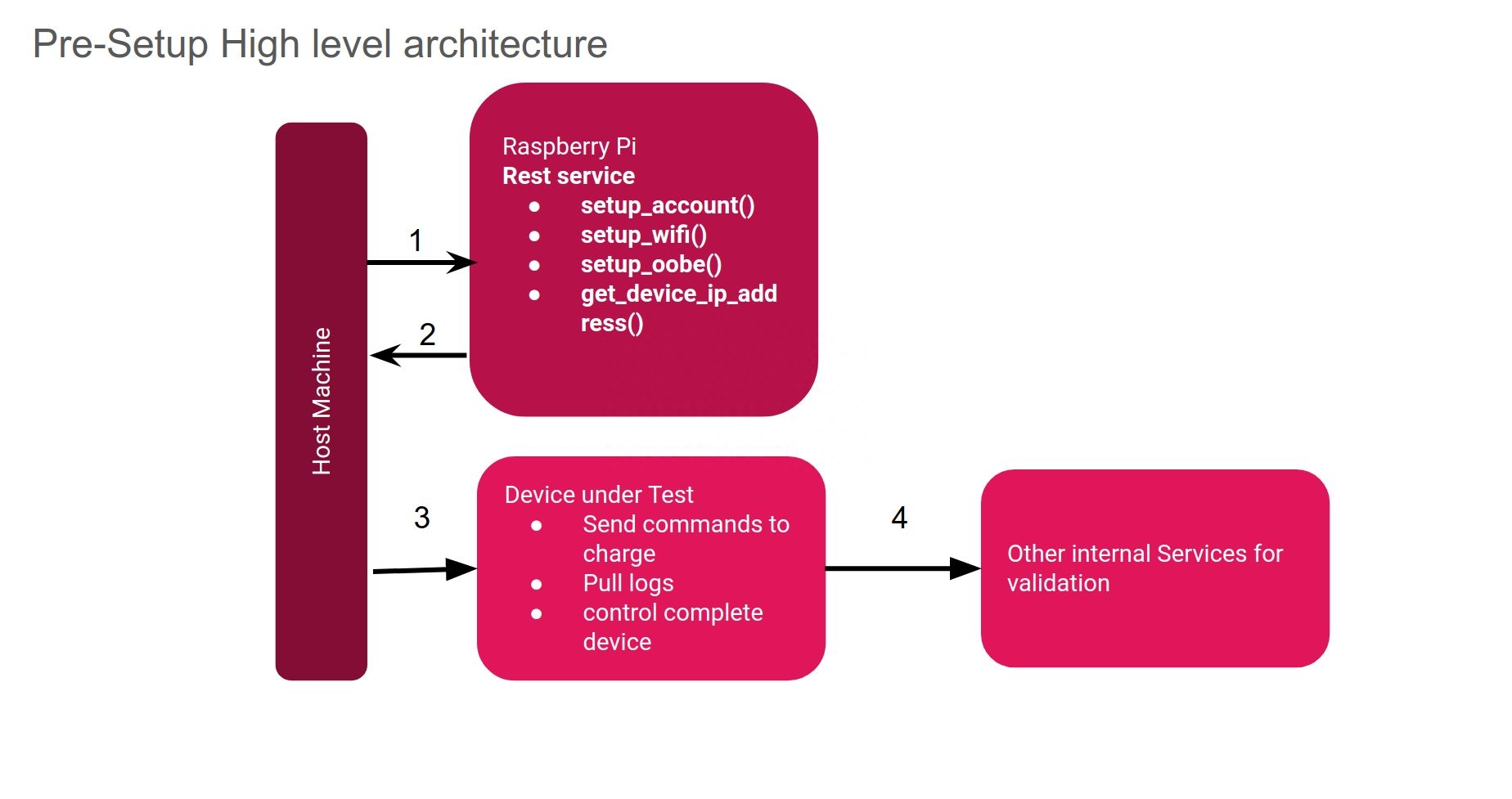
Raspberry Pi 上の RESTful サービスの役割は何ですか? RESTful サービスにはどのようなエンドポイントを含める必要がありますか?
フラッシュ デバイスエラーや例外が発生した場合にロボットを回復します
複数のテスト環境に拡張する
複数のテスト環境向けのセットアップの詳細ヒント:
セットアップをシンプルにしてください。ソリューションを過度に複雑にしたり、過度に設計したりしないでください。私たちが直面している問題の性質と複雑さを考えると、代替案はあるのかという疑問がよくあります。要するに、答えは「はい」です。エミュレータ/エミュレータを使用すると、ここで説明するユースケースのほとんどを効果的にテストできますが、実際のデバイスのテストに代わるものはありません
以上がモバイル ロボット ソフトウェア自動化テストの課題への対処の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



