


「エレベーターに入るために列をなす大勢の人々」のシナリオを考えてみましょう。 先に乗る人が「わがまま」であれば、エレベーターに乗った後その場で立ち止まり、後ろの人がエレベーターに入ることができなくなります。前の人が「無欲」であれば、後ろの人もスムーズにエレベーターに乗れるよう、率先して乗り込みます。
このシナリオに触発されて、研究者らは 無私無欲の探査戦略を開発しました。 このシンプルな戦略により、 ロボット クラスター システムの協力効率が大幅に向上します 結果は 2023 年に発表される予定です6月のネイチャーコミュニケーションズ。

▍「無私の」探索の紹介: ロボットの協力をより効率的にする
数あるロボットクラスタシステムの中でも、クラスタ形成制御は重要かつ特有の課題です。他のクラスター コラボレーションの問題と比較して、フォーメーション制御には独特の技術的課題があります。つまり、グローバル フォーメーションは実際にはグローバルな制約になります。この制約により、元々は 協力的であったロボット間に 競争関係が生まれます。本質的に、この競争関係がフォーメーション制御に多くの困難をもたらします。
従来の方法では、通常、目標割り当てを使用してロボット間の競争問題を解決します。 しかし、割り当てベースの方法には耐障害性と弱い適応性の問題があります。設定された目標に無理があった場合や一部のロボットが故障した場合には、常に目標を設定し直す必要があり、効率の低下につながります。
最近、英国の西湖大学、北杭大学、清華大学、シェフィールド大学の研究者らは、「無私」探査戦略に基づいた新しいロボット協調制御手法を提案しました。コアは平均値に基づいています。ロボット間の競合を解決するための Shift のアルゴリズム: つまり、ロボットは、周囲のロボットと競合すると予測すると、積極的に現在の位置を放棄し、より開けた領域に移動します。 これは、対立を「積極的に」解決できるため、「無私の」戦略と呼ばれます。
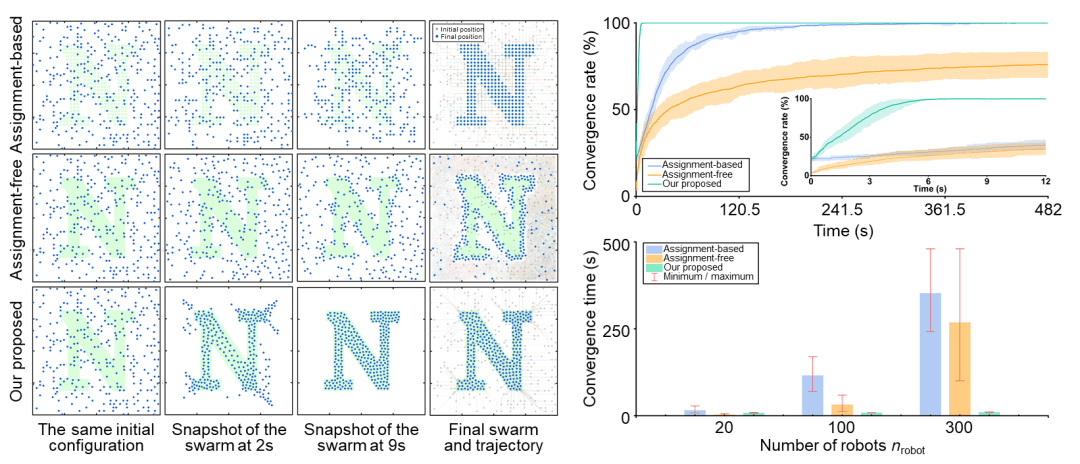
最新の研究成果と比較して、クラスター サイズが大きい場合、提案された「無私の」探査戦略の効率は数十倍向上する可能性があります。そして、この改善はクラスター サイズが大きくなるにつれてさらに増加します。 。さらに、ターゲットの割り当てに依存しないため、この戦略は本質的に耐障害性と適応性があり、複雑な宇宙探査や共同処理などのタスクに拡張できます。
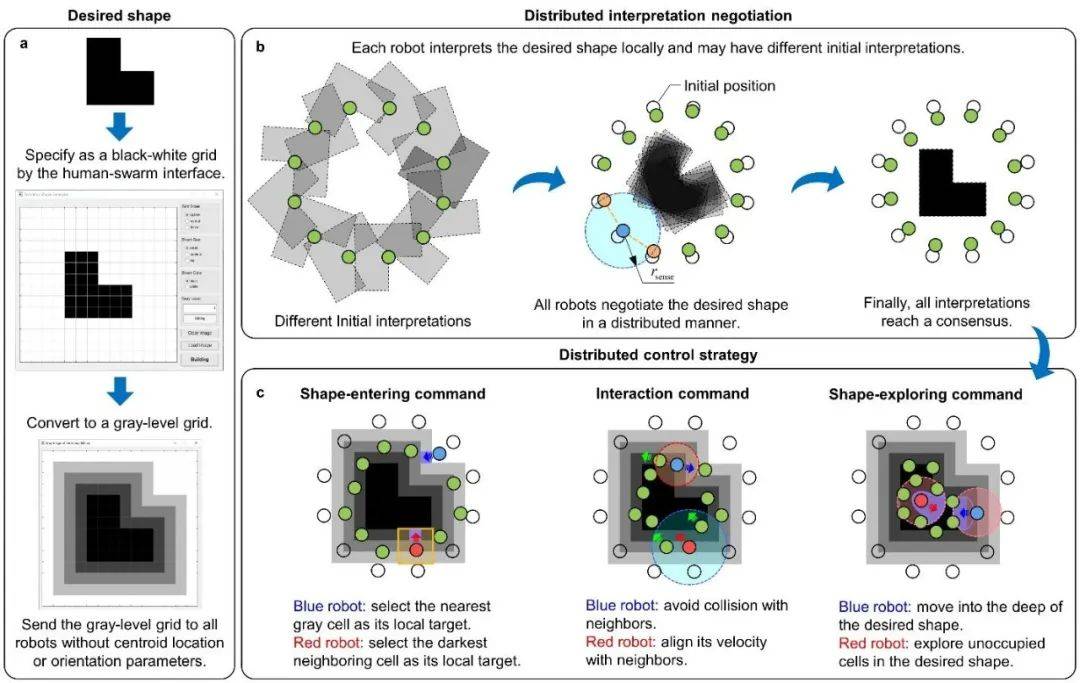
「無私の」探査戦略は 3 つの部分で構成されます。最初の部分は人間とクラスターの相互作用システムで、人間が必要とする幾何学的構成を定式化するために使用されます。 2 番目の部分は分散ネゴシエーション アルゴリズムであり、すべてのロボットは、位置や方向を含むターゲット層のユークリッド パラメータを周囲のロボットと分散方式でネゴシエートします。 3 番目の最も重要な部分は、分散フォーメーション制御アルゴリズムです。 制御アルゴリズムは 3 つの制御命令で構成されます。 最初は、ロボットをターゲットのフォーメーションに導入するために使用されるフォーメーション入力コマンドです。 2 つ目は地層探索コマンドです。これは、Mean-Shift メカニズムを通じて地層内の実行可能エリアを探索するために使用されます。 3 つ目は対話型コマンドで、ロボット間の衝突回避と速度調整を実現するために使用されます。
 この戦略に基づいて、研究チームは
この戦略に基づいて、研究チームは
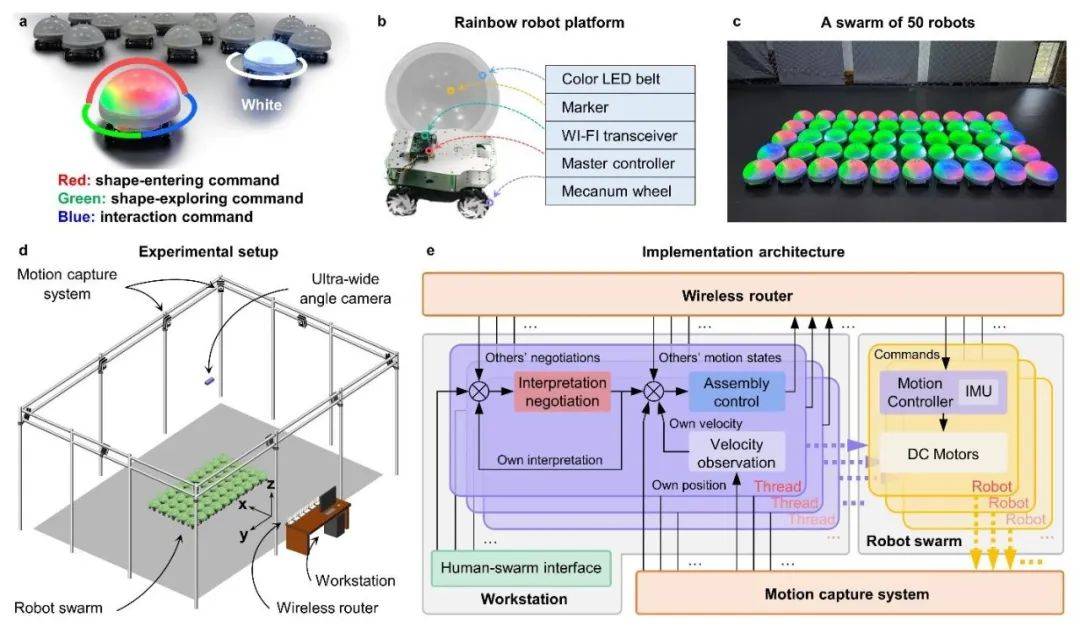
を開発しました。関連する実験は、屋内モーション キャプチャ システムのサポートを利用して実施され、マルチスレッド分散並列方式で実装されました。
「無私の」探索戦略は、
ロボットの自己組織化を制御して、複雑な非凸形状を形成することができます。たとえば、豊富な枝を持つ「スノーフレーク」フォーメーションこの戦略の下では、ロボット クラスターは局所最適に陥ることなくフォーメーションを正確に実現できます。さらに、ロボットの群れはこのようにしてさまざまな非凸形のフォーメーションを形成し、ある形状から別の形状にスムーズに切り替えることができます。
「無私の」探査戦略は、最新の研究作業と比較して効率が数十倍向上しており、この向上はクラスターのサイズが大きくなるにつれてさらに強化されるでしょう。
「無私の」探査戦略は、ターゲットの割り当てやロボットの数の変更などの問題によって制限されないため、適応力があります。たとえば、一部のロボットがクラスターから削除された場合、システム全体は障害検出やフォールトトレラント制御を必要とせず、シームレスにフォーメーションを再形成することができ、システム全体にある程度の「再生」機能が与えられます。
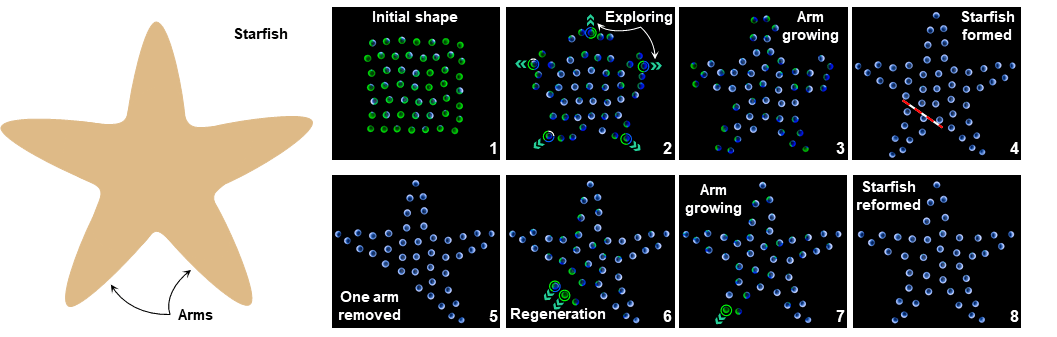
「無私の」探査戦略のもう 1 つの特徴は、時間とともに変化する地層を追跡できることです。重要な用途は、複数のロボットの協調的なハンドリングを実現することです。このプロセスでは、一方ではロボットが隊列を維持しなければならず、他方ではリーダーに従って隊列移動を達成し、それによって協調的な物品の輸送を達成しなければならない。
さらに、「無私の」探索戦略を使用して、複雑な環境を探索することができます。たとえば、入り口で立ち往生することなく、狭い入り口から部屋に大勢の人が入ってくる様子をシミュレートできます。 この例は、「無私の」探索戦略を鮮やかに説明していることを指摘しておく価値があります。 これは、エレベーターに入る人々の生活シーンとよく似ています。多くの人がエレベーターに乗りたいと思った場合、ある人が「利己的」である場合、その人はエレベーターに入った後に動きを止めるでしょう。なぜなら彼はあなたの目標を達成したからです。ただし、後続者の入場を妨げることになります。 この人が「無私」であれば、その人は率先して中に入っていき、後ろの人がスムーズに入ることができるでしょう。
もう 1 つの例は、複雑な迷路の探索に使用できることです。迷路にはコーナーなどの非凸構造が多くありますが、この戦略は探索性が高いため、局所最適に陥ることなく迷路を完全にカバーすることができます。
▍結論
この記事で提案するアルゴリズムの考え方は非常に単純ですが、非常に単純なアイデアですこれは、クラスター形成制御において長年直面してきた重要な問題を解決します。 将来的には、ロボット プラットフォームの認識機能がさらに拡張されて、システム全体がよりインテリジェントになり、高度な知能を持つ生物に真に似た群れ行動の出現が可能になる可能性があります。
▍記事ソース
G. Sun、R. Zhou、Z. Ma、Y. Li、R. Groß、Z. Chen、および S. Zhao*、「ロボット群の形状アセンブリにおける平均シフト探索」、Nature Communications、vol . 14、3476 ページ、2023. https://doi.org/10.1038/s41467-023-39251-5
以上がクラスターのコラボレーション効率を向上するにはどうすればよいですか?中国と外国のチームが協力して平均値シフトに基づくロボット編隊制御戦略を開発の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。





























![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



