


海外メディア Tech Xplore によると、ドイツのシュトゥットガルトにあるマックス・プランク知能システム研究所(MPI-IS)は、モルティという名前の小型四足ロボット犬を発明し、自分で歩く方法を学びました。
この技術を説明する論文「閉ループ中央パターン ジェネレーターにおけるロボット ダイナミクスのプラスチック マッチングの学習」が、7 月 18 日付けの「閉ループ中央パターン ジェネレーターにおけるロボット ダイナミクスのプラスチック マッチングの学習」に掲載されました。 Nature Machine Intelligence 誌の論文の最初の著者は Felix Ruppert です。
ルパート氏は、「私たちが研究したロボット犬モルティは動物と同じ反射神経を持ち、失敗しても自立して歩く方法を学ぶことができます。」
▲ロボット犬のモルティ
人間や動物の脊髄にはCPG(Central Pattern Generator)と呼ばれる神経があり、動物のメタネットワークが存在します。 CPG は、生物が歩行、瞬き、消化などのリズミカルなタスクを完了するのに役立ちます。このニューロンのネットワークは、脳からの入力がなくても周期的な筋肉の収縮を引き起こすことができます。
Rupert は、CPG の効果をシミュレートするために Morti の背中に仮想脊髄を取り付け、この仮想脊髄にサンプル データベースをインストールしました。 Morti がスムーズに歩行すると、ロボットの足のセンサー データが CPG サンプル ライブラリのデータと常に比較され、適切な歩行姿勢が提供されます。
ロボットが転倒した場合、学習アルゴリズムは脚を前後に振る距離と速度を変更することで歩行方法を最適化します。機械学習プロセス中に、CPG はロボットをよりスムーズに歩行させるためにいくつかの適応モーション信号を送信します。この機械学習プロセスの核心は、CPG の出力信号を変更し、どのような状況で機械がつまずくかを監視することです。
▲Morti はフィードバック データに基づいて歩行を最適化します
Morti は小動物が歩くことを学習するプロセスを模倣し、連続して転倒した後にのみ最も効果的な方法を見つけます。 . 筋肉の使い方と歩き方の習得方法。ルパート氏によると、最初はモルティは転んでしまうが、約1時間後にはアルゴリズムがモルティの最適な歩き方を見つけるのに役立つという。ルパート氏はまた、「現在、私のチームはモーティマーの行動範囲を広げるために、モーティにさらに多くのセンサーを追加しているところです。私たちはモルティをより動物に近づけたいと考えています。」
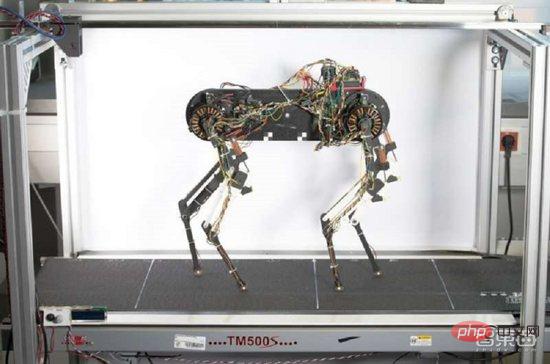
同じ距離を歩くのに、現在、ほとんどの産業用四足ロボットは数十ワットまたは数百ワットの電力を必要としますが、Morti の消費電力はわずか 5 ワットです。
これは、一方では産業用四足歩行ロボットの体積と重量が大きくなり、その動きをサポートするためにより多くの電力が必要になるためであり、他方では、Morti のアルゴリズムがよりインテリジェントであるためです。
一般的なロボットが歩行する場合、機械学習により各脚の動きの詳細を大量の計算によって事前に設計するため、多くの電力を消費します。しかし、モルティさんが歩行中に転倒した後は、新しいアルゴリズムの結果に基づいて歩行角度を再調整できる。 Morti はこのフィードバック データを使用して、多くの計算を必要とせずに歩く方法を学習します。 Morti は、歩くことを学ぶ過程でのエネルギー消費を削減します。この研究では、モルティが1時間歩いた後、最初に歩き始めたときよりもエネルギー消費が42%減少したことが判明した。
▲トレッドミルの上を歩くモルティ氏
テキサス大学サンアントニオ校のディリーシャ・クディティプディ教授は、「一般的に言えば、人工知能は次のようなことができる」と述べた。 「特定のタスクをよく学習しますが、人工知能は環境が変化したときに再調整することができません。モルティはデータのフィードバックに基づいて自らの動作パターンを自律的に調整することができ、環境を再調整することが可能です。」
ルパートのロボット犬は、人工知能アルゴリズムの自己学習を通じて生物と同じタスクを実行できます。これには機械学習テクノロジーが組み合わされるだけでなく、生物学的分野も含まれます。
このテクノロジーを大規模に使用できれば、2 つの利点があります。まず、機械学習のエネルギー効率が向上し、エネルギー消費が少なくなります。マシンは、大量のデータに基づいて強引な計算を実行する必要がなくなり、自律学習によって「より賢く」なることができます。第二に、このテクノロジーは人工知能と生物学の分野の統合を促す可能性があります。
現在、この技術によりロボット犬をより動物に近づけることができます。将来的には、この技術が発展するにつれて、ロボットはより人間に近づくかもしれません。
以上がロボット犬は1時間で歩き方を覚えることができるでしょうか?動物の本能を模倣する研究、Nature サブジャーナルに掲載の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



