


翻訳者 | Li Rui
レビュアー | Sun Shujuan
ロボットを開発する場合、システム統合がプロジェクト リソースのほとんどを占めることが多く、これは最終アプリケーションの開発よりも重要です。ローエンドの産業用協働ロボットの出現により、既存のハードウェア上で動作するソフトウェアの開発のみに注力するソフトウェア開発者も出てきました。ただし、ロボットのハードウェア機能とソフトウェア機能の間には重要な関係があります。より専門的でエネルギー効率が高く、安全で高性能なロボットを作成するには、コンピューティング ハードウェアの設計制御を維持する必要があります。

このハードウェアの課題は、ロボット工学などの分野の開発者の作業を複雑にしています。開発者のスキルはソフトウェア開発に偏っていることが多いためです。これは、新しい産業用ロボットの市場需要に応えるためには、アダプティブ コンピューティング ハードウェアを設計するという見通しに直面しなければならないことを意味します。生産ラインや倉庫などの分野でロボットを使用して生産性を向上させる企業は、さらなる柔軟性、より微細な位置制御、優れたビジョンベースの機能、改善されたデータキャプチャ、低消費電力を提供するデバイスを求めています。
ロボティクス ハードウェア アクセラレーションの主な原理は、従来の制御主導のアプローチとは異なり、ソフトウェア開発に対するハイブリッド制御とデータ主導のアプローチにより、チームが最適な量のハードウェアを割り当てるカスタム コンピューティング アーキテクチャを設計できるということです。アプリケーションリソース。
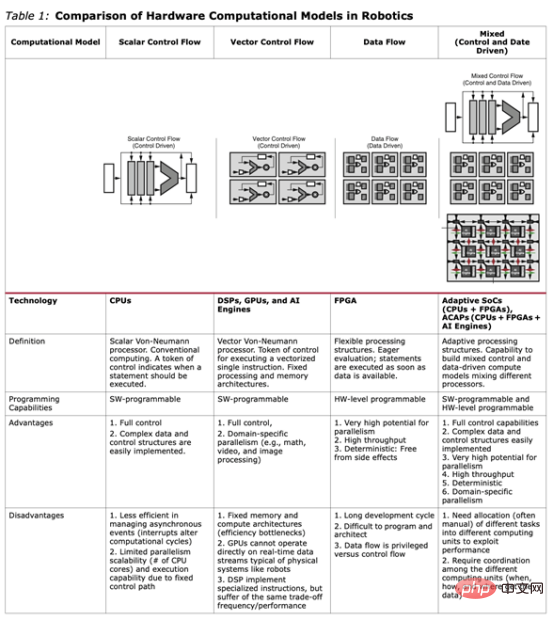
実装に関しては、ヘテロジニアス コンピューティング モデルが必要です。これは、制御フロー計算に優れた CPU と GPU を活用し、データ フロー計算を処理する FPGA の強みを活用します。このアプローチは、柔軟性と CPU/GPU の完全な制御の両方を提供し、低消費電力、高性能、低遅延、ハードウェア アクセラレーションの決定性を備えた複雑な計算を実装します。現在、さまざまなベンダーが、このハイブリッド コンピューティング モデルの利点を提供する、AMD-Xilinx Kria™ SOM とそれに関連する Kria ロボット スタックなどの適応型システム オン チップ (SoC) およびシステム オン モジュール (SOM) デバイスを提供しています。この表は、これらの異なるモデルを比較しています。
 適応型システム オン チップ (SoC) とシステム オン モジュール (SOM) を使用すると、ロボット工学の専門家は、正しいデータ パスと制御を作成するアーキテクチャをプログラミングすることでマシンの動作を構築できます。メカニズム。ただし、確立されたツールや技術を使用してこのようなアーキテクチャをプログラムするには、高度なエンジニアリング スキルが必要です。
適応型システム オン チップ (SoC) とシステム オン モジュール (SOM) を使用すると、ロボット工学の専門家は、正しいデータ パスと制御を作成するアーキテクチャをプログラミングすることでマシンの動作を構築できます。メカニズム。ただし、確立されたツールや技術を使用してこのようなアーキテクチャをプログラムするには、高度なエンジニアリング スキルが必要です。
ロボット工学者は適切なハードウェアと組み込み設計の専門知識を欠いており、現在のロボットのタスクを解決するために計算グラフの形式で動作を構築することに慣れています。彼らは多くの場合、C を使用して、高度なソフトウェア エンジニアリングの実践を通じて複雑なリアルタイムの決定論的システムを作成します。
ロボット オペレーティング システム (ROS) 上に構築
ROS はロボット アプリケーション開発の事実上の業界標準であり、2020 年の ROS2 の登場以降、その傾向はさらに強くなっています。これは業界全体のロボティクス アプリケーションのデフォルトのソフトウェア開発キット (SDK) となり、現在多くのグループが ROS と Gazebo を使用しています。
アダプティブ コンピューティングを ROS に統合するこれまでの取り組みでは、ハードウェア エンジニアの観点からこの課題に対処してきました。ユーザーが組み込みフローやハードウェア フローの経験があり、RTL、HDL、HLS などの概念やそれらの操作に使用される設計ツールに精通していることを前提としています。同様に、埋め込みターゲットにデプロイするには、Yocto、OpenEmbedded、および関連ツールについてある程度の理解が必要です。
ほとんどのロボット工学専門家がこのようなバックグラウンドを持っていないことを理解して、ROS2 ハードウェア アクセラレーション ワーキング グループ (HAWG) は、組み込みプロセスを ROS エコシステムに直接統合するために ROS 中心のアプローチを採用しています。ロボット工学者がデスクトップ ワークステーションに ROS ワークスペースを構築するときに楽しんでいるのと同様のエクスペリエンスを提供することを目的としています。
HAWG の研究は、アダプティブ コンピューティングを活用するための ROS 計算グラフの最適化に関する公開された研究と、プログラマブル ロジックのグラフの一部を高速化するためのツールと方法に関する推奨事項に基づいています。これに加えて、HAWG は現在、C や OpenCL などの使い慣れた言語に焦点を当てたアーキテクチャ (下の図) を提案しています。 ##################################
ROS 2 と HAWG のスタックによりハードウェアの高速化が促進されます
提案されたアーキテクチャはプラットフォームに依存しないため、エッジ施設、ワークステーション、データセンター、またはクラウド コンピューティング プラットフォームに適しており、テクノロジーに依存しないため、FPGA をターゲットにすることができます。 CPU と GPU を備えており、さまざまなモジュールやマザーボードに簡単に移植できます。
最終的には、この取り組みにより、ほとんどのロボット工学専門家がハードウェア アクセラレーションの機会を利用して、次世代の高度で複雑なロボットを実装できるようになります。
元のタイトル: ROS 2 を使用したロボットのハードウェア アクセラレーションの簡素化 、著者: Ben Dickson
以上がROS 2 を使用してロボットのハードウェア アクセラレーションを簡素化する方法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



