


原題: DenserRadar: A 4D millimeter-wave Radar point Cloud detecter based onense LiDAR point Cloud
論文リンク: https://arxiv.org/pdf/2405.05131
著者の所属: 清華大学

4D ミリ波 (mmWave) レーダーは、極限環境での堅牢性、広い検出範囲、および速度と高度の測定機能を備えており、エッジ状況 (コーナー) に直面する自動運転システムに役立つことが示されています。の場合)、知覚を強化する大きな可能性があります。ただし、4D ミリ波レーダー点群固有の希薄性とノイズにより、そのさらなる開発と実用化は制限されます。この論文では、高解像度の高密度レーダー点群を活用する新しい 4D ミリ波レーダー点群検出器を紹介します。私たちの手法は、ステッチされた LiDAR 点群から高密度 3D 占有空間のグラウンド トゥルースを構築し、DenserRadar という特別に設計されたネットワークを使用します。提案された方法は、点群密度と精度の点で既存の確率ベースおよび学習ベースのミリ波レーダー点群検出器を上回り、K-Radar データセットでより良い結果を達成します。
この作品は、高密度の 3D 占有データ空間グラウンド トゥルースによって監督された最初の 4D ミリ波レーダー点群検出器です。これは、マルチフレーム LiDAR 点群をステッチすることによって生成され、それによって検出されるミリ波の密度が増加します。ウェーブレーダー点群。
この論文では、革新的な高密度の雪の 3D 占有データ空間のグラウンド トゥルース生成プロセスと、K-Radar データセットの高密度の LiDAR 点群をステッチする方法を提案します。これらの点群は、包括的なシーンのグラウンド トゥルースを提供し、公開され次第利用可能になります。さらなる研究。
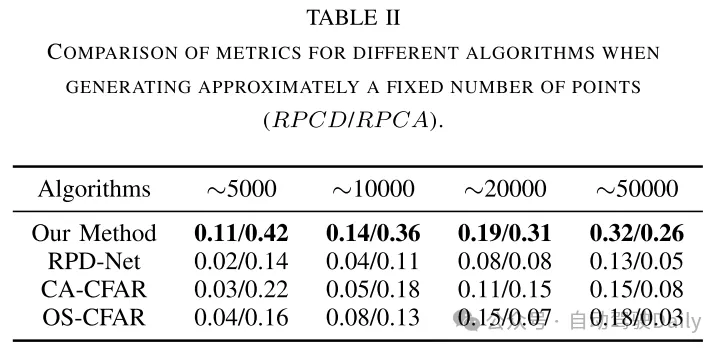
DenserRadar ネットワークの特殊な設計により、この記事のアルゴリズムは、点群の密度と精度の点で、既存の CFAR タイプおよび学習ベースのミリ波レーダー点群検出方法よりも優れています。
自動運転技術は、安全、便利、快適な移動体験の提供を目的としており、その開発スピードは目を見張るものがあります。高度な自動運転を実現するには、複雑な環境を認識し位置を把握する能力が不可欠です。そのため、自動運転車に搭載されるカメラ、ライダー(LiDAR)、ミリ波レーダーなどのセンサーやその関連アルゴリズムに対する研究の関心が高まっています。
ミリ波 (mmWave) レーダーは、コンパクトなサイズ、高い費用対効果、全天候への適応性、速度測定機能、広い検出範囲 [1] などの利点により、自動運転の分野で広く使用されています。多入力多出力 (MIMO) アンテナ技術の最近の進歩により、高さの解像度がさらに向上し、4D ミリ波レーダーの出現が可能になりました。したがって、4D ミリ波レーダーは、特に雨、雪、霧などの困難なエッジシーンにおいて、自動運転における知覚および測位機能の重要な強化であるとますます認識されています。 4Dミリ波レーダーは、その名のとおり、距離、方位、高度、ドップラー速度の4次元のターゲット情報を計測することができ、総合的なセンシングソリューションを提供します。
しかし、4Dミリ波レーダー点群の品質は、ライダー点群に比べて大幅に遅れています。まず、4D ミリ波レーダー点群には、特に角度測定において解像度が低いという問題があります。この制限は主に、ミリ波レーダーのアンテナ構成と到来方向 (DOA) 推定によるものです [2]。第 2 に、4D ミリ波レーダー点群は LIDAR 点群よりもはるかにまばらです。第三に、マルチパス効果、信号干渉、地面反射により、4D ミリ波レーダー点群には多数のクラッター ポイントが含まれることがよくあります。これらすべての欠点が、4Dミリ波レーダーの自動運転への応用を妨げています。
4D ミリ波レーダー点群の品質は、ハードウェアによって制限されるだけでなく、信号処理アルゴリズムによっても制限されます [3]。特に、生のレーダーグラムまたはテンソルから実際のターゲットを検出して点群を生成することは、品質に大きな影響を与える可能性があります。従来、誤警報率 (CFAR) 検出器とそのバリアント [4]、[5] はミリ波レーダー点群の検出に広く使用されています。ただし、確率ベースのアルゴリズムである CFAR タイプの検出器は、異なるサイズの物体を検出するときに問題に遭遇する可能性があります。これらの物体は独立しておらず、均一に分散されていないためです [6]。これは自動運転シナリオでよく発生します。
4D ミリ波レーダーに関連する点群の品質問題に対処するために、この論文では、LIDAR 点群から生成された高密度のグラウンドトゥルース情報によって監視される学習ベースの 4D ミリ波レーダー点群検出器を提案します。まず、この論文では、前処理された LiDAR 点群の複数のフレームを結合して、高密度の 3D 占有グラウンド トゥルースを生成します。次に、この記事では、元の 4D ミリ波レーダー テンソルの特徴を抽出し、より高密度で正確な 4D ミリ波レーダー点群を生成する DenserRadar ネットワークを紹介します。このネットワークは、他の新しい設計要素とともに重み付きハイブリッド損失関数を採用して、多重解像度の特徴を捕捉し、従来の技術よりも優れた解像度で点群を生成します。 K-Radar データセット [7] に対して行われた比較実験により、この方法の有効性が証明されています。
この記事のアルゴリズムを図 1 に示します。まず、本論文は、マルチフレーム LIDAR 点群データを結合することにより、監視情報として高密度 3D 占有空間のグラウンド トゥルースを取得するグラウンド トゥルース生成プロセスを設計し、次に、元の 4D ミリ波からデータを生成する役割を担う DenserRadar ネットワークを確立します。レーダー テンソル データ内のミリ波レーダー点群の検出。

図 1. アルゴリズム全体の概要。

図 2. 真理値生成のフローチャート。

図 4. この記事の DenserRadar アルゴリズムと CA-CFAR アルゴリズムの定性的な点群の比較。参考として写真と高密度 3D 占有空間の真の点群を使用します。図内の各矢印は 10 メートルの長さを表します。


このペーパーでは、新しい 4D ミリ波レーダー点群検出ネットワークである DenserRadar、および高密度のグランド トゥルースを生成する革新的なプロセスを紹介します。実験結果とアブレーション研究は、当社のネットワーク アーキテクチャとグラウンド トゥルース生成方法論の有効性を実証しています。この研究は、特に困難なエッジケースのシナリオにおいて、自動運転システムの知覚および位置特定能力を向上させる可能性を秘めています。
以上がDenserRadar: 高密度 LiDAR 点群に基づく 4D ミリ波レーダー点群検出器の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



