


Je suis très heureux d'être invité à participer à l'événement Heart of Autonomous Driving Nous partagerons la méthode anti-perturbation ADMap pour la reconstruction en ligne de cartes vectorisées de haute précision. Vous pouvez trouver notre code sur https://github.com/hht1996ok/ADMap. Merci à tous pour votre attention et votre soutien.
Dans le domaine de la conduite autonome, la reconstruction de cartes haute définition en ligne revêt une grande importance pour les tâches de planification et de prévision. Des travaux récents ont permis de créer de nombreux modèles de reconstruction de cartes haute définition hautes performances pour répondre à ce besoin. Cependant, l'ordre des points au sein de l'instance vectorisée peut être instable ou irrégulier en raison d'écarts de prédiction, affectant ainsi les tâches ultérieures. Par conséquent, nous proposons le cadre de reconstruction de carte anti-perturbation (ADMap). Cet article espère prendre en compte la vitesse du modèle et la précision globale, et ne pas déranger les ingénieurs lors du déploiement. Par conséquent, trois modules efficients et efficaces sont proposés : Multi-Scale Perception Neck (MPN), Instance Interactive Attention (IIA) et Vector Direction Difference Loss (VDDL). En explorant en cascade les relations entre les ordres de points et au sein des instances, notre modèle supervise mieux le processus de prédiction de l'ordre des points.
Nous avons vérifié l'efficacité d'ADMap dans les ensembles de données nuScenes et Argoverse2. Les résultats expérimentaux montrent qu'ADMap présente les meilleures performances dans divers tests de référence. Dans le benchmark nuScenes, ADMap améliore mAP de 4,2 % et 5,5 % par rapport à la référence en utilisant uniquement les données de la caméra et les données multimodales, respectivement. ADMapv2 réduit non seulement la latence d'inférence, mais améliore également considérablement les performances de base, le mAP le plus élevé atteignant 82,8 %. Dans l'ensemble de données Argoverse, le mAP d'ADMapv2 a augmenté à 62,9 % tandis que la fréquence d'images est restée à 14,8 FPS.
En résumé, l'ADMap que nous avons proposé a les principales contributions suivantes :
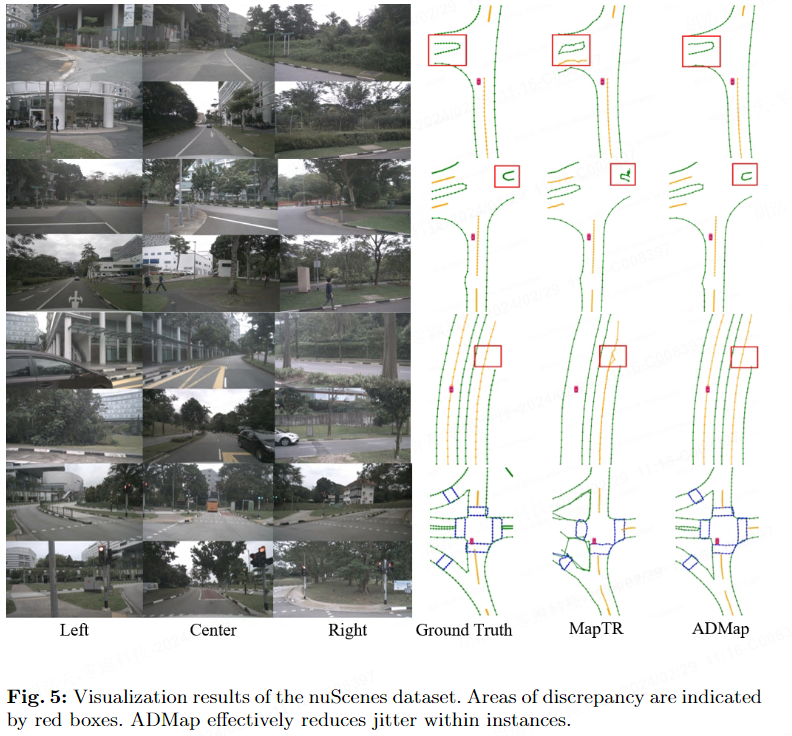
Comme le montre la figure 1, les points de prédiction dans l'instance tremblent ou se décalent souvent inévitablement. Cette gigue rendra le vecteur d'instance reconstruit inégal ou irrégulier, affectant sérieusement la qualité et l'aspect pratique de. cartes en ligne de haute précision. Nous pensons que la raison est que les modèles existants ne prennent pas pleinement en compte l'interaction entre les instances et au sein des instances. Une interaction incomplète entre les points d'instance et les informations topologiques de la carte entraînera des positions prédites inexactes. De plus, seule une supervision telle que la perte L1 et la perte d'intégration du cosinus ne peut pas utiliser efficacement les relations géométriques pour contraindre le processus de prédiction des points d'instance. Le réseau doit utiliser des segments de lignes vectorielles entre les points pour capturer avec plus de précision les informations de direction de la séquence de points. contraindre chaque point du processus de prédiction.
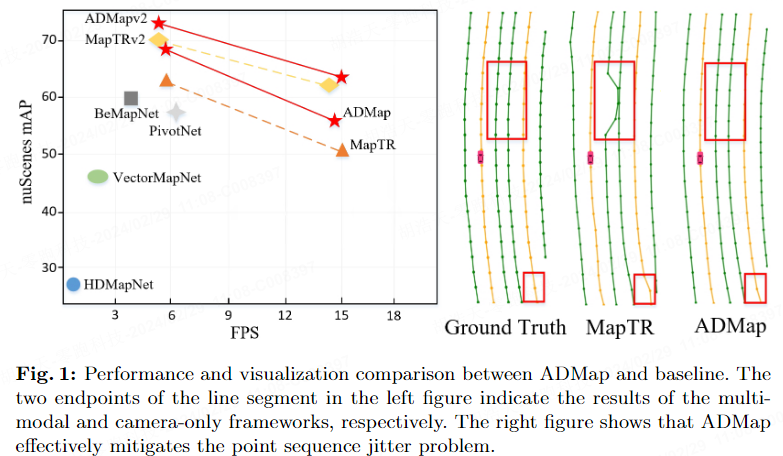
Afin d'atténuer les problèmes ci-dessus, nous avons proposé de manière innovante le cadre de reconstruction de carte anti-perturbation (ADMap) pour réaliser une reconstruction stable et en temps réel de cartes vectorisées de haute précision.
Comme le montre la figure 2, ADMap utilise le cou de perception à plusieurs échelles (MPN), l'attention interactive d'instance (IIA) et la perte de différence de direction vectorielle (perte de différence de direction vectorielle, VDDL) pour prédire l'ordre des points. topologie plus précisément. MPN, IIA et VDDL seront présentés respectivement ci-dessous.
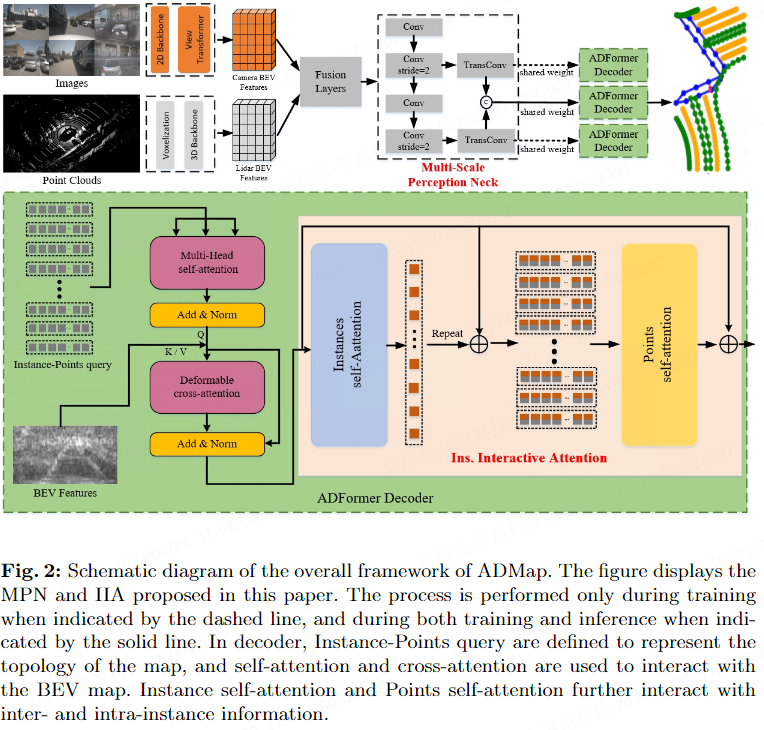
Pour obtenir des fonctionnalités BEV plus détaillées, nous introduisons le Multi-Scale Perception Neck (MPN). MPN reçoit les fonctionnalités BEV fusionnées en entrée. Grâce au sous-échantillonnage, les caractéristiques BEV de chaque niveau sont connectées à une couche de suréchantillonnage pour restaurer la carte des caractéristiques de taille d'origine. Enfin, les cartes de fonctionnalités à chaque niveau seront fusionnées en fonctionnalités BEV multi-échelles.
Comme le montre la figure 2, la ligne pointillée représente que cette étape n'est mise en œuvre que pendant la formation, et la ligne continue représente que cette étape est mise en œuvre pendant les processus de formation et d'inférence. Au cours du processus de formation, des cartes de fonctionnalités BEV multi-échelles et des cartes de fonctionnalités BEV à chaque niveau sont envoyées au Transformer Decoder, ce qui permet au réseau de prédire les informations d'instance de la scène à différentes échelles pour capturer des fonctionnalités multi-échelles plus raffinées. Pendant le processus d'inférence, MPN conserve uniquement les caractéristiques BEV multi-échelles et ne génère pas de cartes de caractéristiques à chaque niveau. Cela garantit que l'utilisation des ressources du cou pendant l'inférence reste inchangée.
Transformer Decoder définit un ensemble de requêtes au niveau de l'instance et un ensemble de requêtes au niveau du point. Les requêtes au niveau du point sont ensuite partagées avec toutes les instances. Ces requêtes hiérarchiques sont définies comme :
Le décodeur se compose de plusieurs couches de décodage en cascade qui mettent à jour de manière itérative la requête hiérarchique. Dans chaque couche de décodage, des requêtes hiérarchiques sont entrées dans le mécanisme d'auto-attention, ce qui permet d'échanger des informations entre les requêtes hiérarchiques. L'attention déformable est utilisée pour interagir avec les requêtes hiérarchiques et les fonctionnalités BEV multi-échelles.
Afin de mieux obtenir les caractéristiques de chaque instance dans l'étape de décodage, nous avons proposé l'Instance Interactive Attention (IIA), qui comprend l'auto-attention des instances et l'auto-attention des points. Contrairement à MapTRv2 qui extrait en parallèle les intégrations au niveau de l'instance et au niveau du point, IIA extrait les intégrations de requêtes en cascade. Les interactions de fonctionnalités entre les intégrations d'instances aident en outre le réseau à apprendre les relations entre les intégrations au niveau du point.
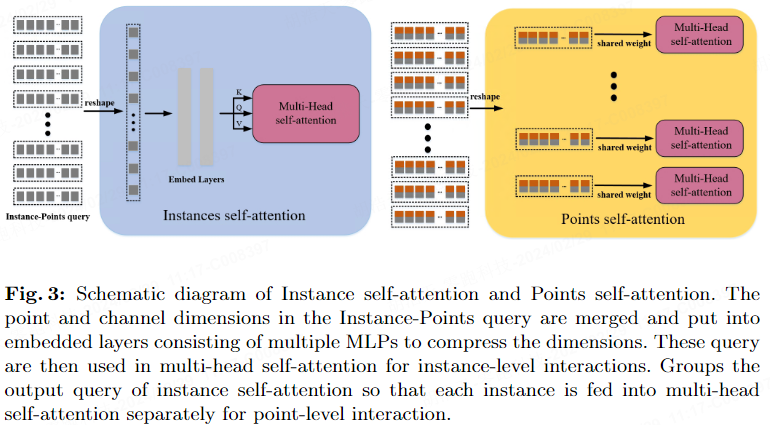
Comme le montre la figure 3, les intégrations hiérarchiques produites par l'attention croisée déformable sont entrées dans l'auto-attention des instances. Après avoir fusionné la dimension de point et la dimension de canal, la transformation de dimension est effectuée. Par la suite, l'intégration hiérarchique est connectée à la couche d'intégration composée de plusieurs MLP pour obtenir la requête d'instance. La requête est placée dans l'auto-attention multi-têtes pour capturer la relation topologique entre les instances et obtenir l'intégration d'instance. Pour incorporer des informations au niveau de l'instance dans des intégrations au niveau du point, nous additionnons les intégrations d'instance et les intégrations hiérarchiques. Les fonctionnalités ajoutées sont entrées dans Point self-attention, qui interagit avec les fonctionnalités ponctuelles de chaque instance pour corréler plus finement les relations topologiques entre les séquences de points.
La carte de haute précision contient des éléments de carte statiques vectorisés, notamment des lignes de voies, des bordures et des passages pour piétons. ADMap propose une perte de différence de direction vectorielle pour ces formes ouvertes (lignes de voie, bordures) et fermées (passages pour piétons). Nous modélisons la direction du vecteur de séquence de points à l'intérieur de l'instance, et la direction du point peut être surveillée plus en détail par la différence entre la direction du vecteur prédite et la direction du vecteur réel. De plus, les points présentant de grandes différences dans les directions vectorielles réelles sont considérés comme représentant des changements drastiques dans la topologie de certaines scènes (plus difficiles à prédire) et nécessitent plus d'attention de la part du modèle. Par conséquent, les points présentant des différences de direction vectorielles réelles plus importantes reçoivent un poids plus important afin de garantir que le réseau puisse prédire avec précision ce point de changement radical.
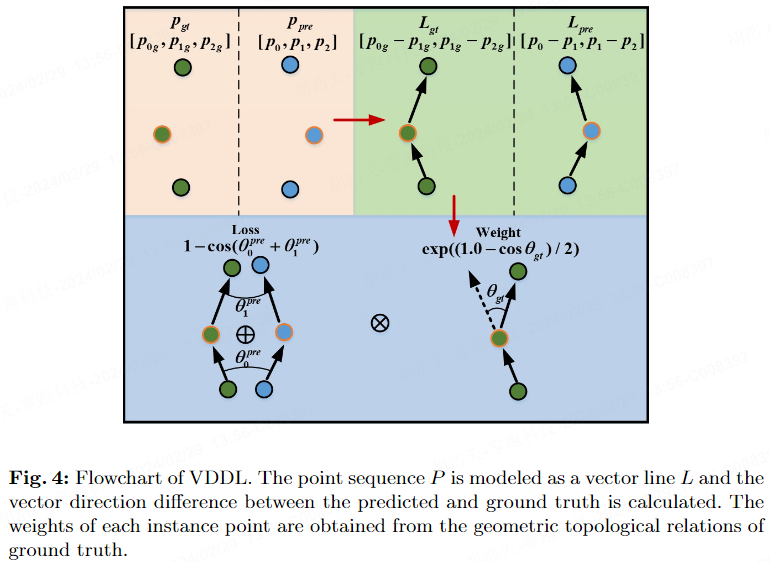
La figure 4 montre la modélisation initiale de la ligne vectorielle prédite { et de la vraie ligne vectorielle { dans la séquence de points prédite { et la séquence de points vraie { ). Afin de garantir que les angles opposés n'obtiennent pas la même perte, nous calculons le cosinus de la différence d'angle de la ligne vectorielle θ' :
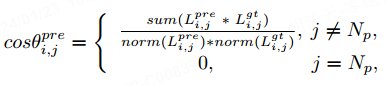
où la fonction accumule la position des coordonnées de la ligne vectorielle, représentant l'opération de normalisation. . Nous utilisons la différence d'angle vectorielle de chaque point dans l'instance réelle pour leur attribuer des poids de différentes tailles. Le poids est défini comme suit :
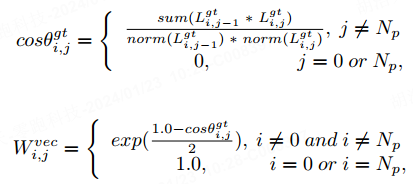
, qui représente le nombre de points dans l'instance, et la fonction représente la fonction exponentielle de base e. Étant donné que la différence d'angle vectoriel ne peut pas être calculée entre le premier et le dernier point, nous définissons le poids du premier et du dernier point sur 1. Lorsque la différence d'angle vectoriel dans la vérité terrain devient plus grande, nous accordons à ce point un poids plus important, ce qui incite le réseau à accorder plus d'attention aux changements significatifs de la topologie de la carte. La perte de différence d'angle de chaque point de la séquence de points est définie comme :
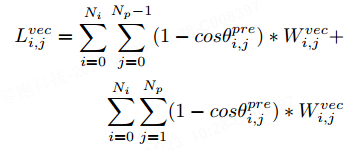
Nous utilisons θ pour ajuster l'intervalle de la valeur de perte à [0,0, 2,0]. En ajoutant les cosinus des différences d'angle entre les lignes vectorielles adjacentes en chaque point, cette perte couvre de manière plus complète les informations de topologie géométrique de chaque point. Étant donné que les deux premier et dernier points n’ont qu’une seule ligne vectorielle adjacente, la perte du premier et des deux derniers points est le cosinus de la différence d’angle vectorielle unique.
Pour une évaluation équitable, nous divisons les éléments de la carte en trois types : les lignes de voie, les limites de route et les passages pour piétons. La précision moyenne (AP) est utilisée pour évaluer la qualité de la construction de la carte, et la somme des distances de chanfrein entre l'ordre des points prédit et l'ordre réel des points est utilisée pour déterminer si les deux correspondent. Le seuil de distance du chanfrein est fixé à [0,5, 1,0, 1,5], nous calculons AP sous ces trois seuils respectivement et utilisons la moyenne comme indicateur final.
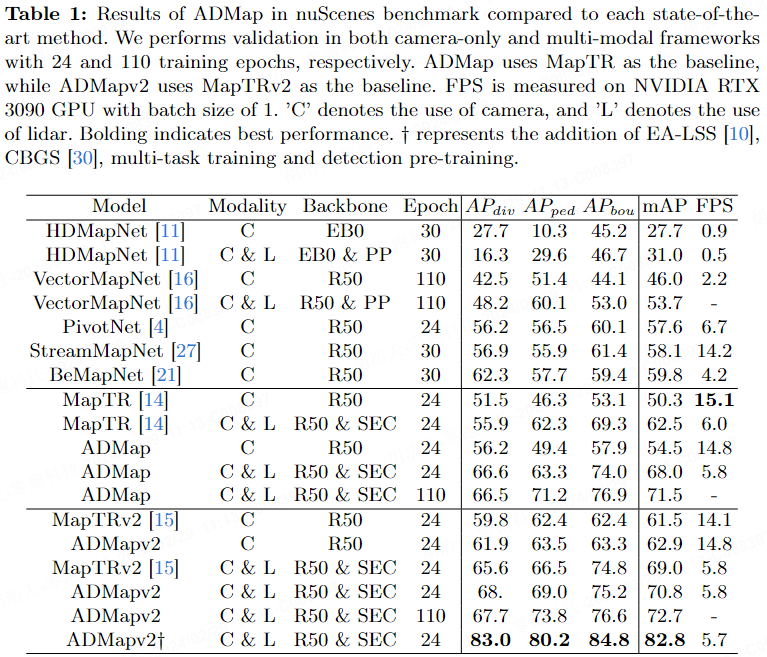
Le Tableau 1 présente les métriques d'ADMap et les méthodes de pointe sur l'ensemble de données nuScenes. Dans le cadre de la caméra uniquement, le mAP d'ADMap a augmenté de 5,5 % par rapport à la référence (MapTR) et ADMapv2 a augmenté de 1,4 % par rapport à la référence (MapTRv2). ADMapv2 a un mAP maximum de 82,8 %, atteignant les meilleures performances parmi les benchmarks actuels. Certains détails seront annoncés dans les versions ultérieures d'arxiv. En termes de vitesse, ADMap améliore considérablement les performances du modèle par rapport à sa référence avec un FPS légèrement inférieur. Il convient de mentionner qu'ADMapv2 améliore non seulement les performances, mais améliore également la vitesse d'inférence du modèle.
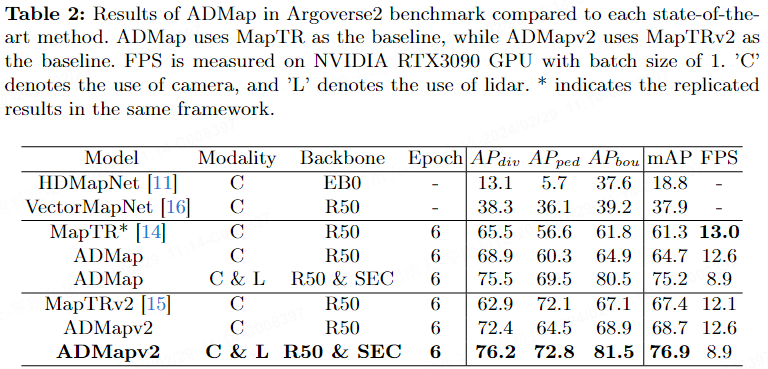
Le tableau 2 rapporte les métriques d'ADMap et les méthodes de pointe dans Argoverse2. Dans le cadre de la caméra uniquement, ADMap et ADMapv2 se sont améliorés respectivement de 3,4 % et 1,3 % par rapport à la référence. Dans le cadre multimodal, ADMap et ADMapv2 ont obtenu les meilleures performances, avec mAP de 75,2 % et 76,9 % respectivement. En termes de vitesse. ADMapv2 amélioré de 11,4 ms par rapport à MapTRv2.
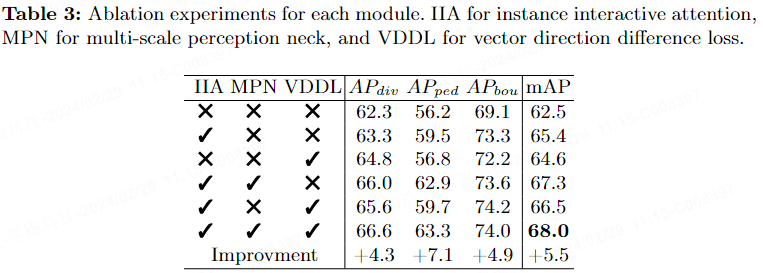
Dans le tableau 3, nous fournissons des expériences d'ablation pour chaque module d'ADMap sur le benchmark nuScenes.
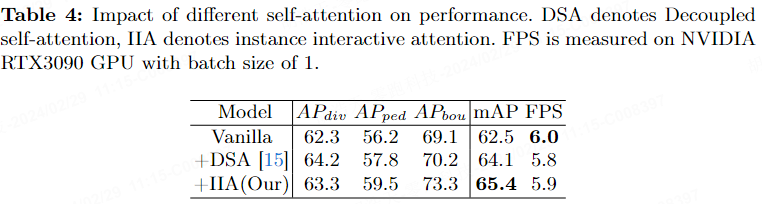
Le tableau 4 montre l'impact de l'insertion de différents mécanismes d'attention sur la performance finale. DSA signifie attention personnelle découplée, et IIA signifie attention interactive. Les résultats montrent que l'IIA améliore le mAP de 1,3 % par rapport au DSA.
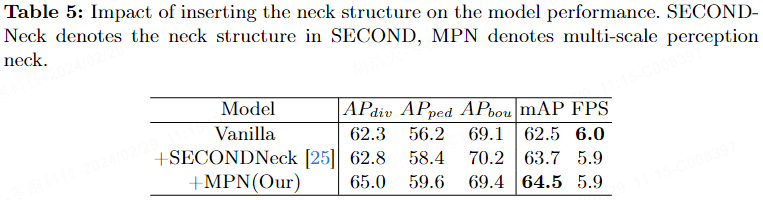
Le tableau 5 rapporte l'impact de l'ajout de couches de colonne vertébrale et de cou sur mAP après la fusion des fonctionnalités. Après avoir ajouté les couches de colonne vertébrale et de cou basées sur SECOND, mAP a augmenté de 1,2 %. Après avoir ajouté MPN, le mAP du modèle a augmenté de 2,0 % sans augmenter le temps d'inférence.
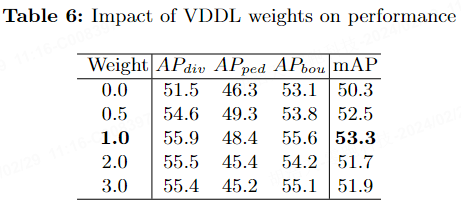
Le tableau 6 indique l'impact sur les performances de l'ajout de VDDL dans le benchmark nuScenes. On peut voir que lorsque le poids est fixé à 1,0, mAP est le plus élevé, atteignant 53,3 %.
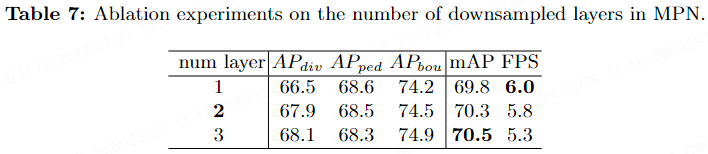
Le tableau 7 rapporte l'impact du nombre de couches de sous-échantillonnage MPN sur les performances finales dans le benchmark nuScenes. Plus il y a de couches de sous-échantillonnage, plus la vitesse d'inférence du modèle est lente. Par conséquent, pour équilibrer vitesse et performances, nous avons fixé le nombre de couches de sous-échantillonnage à 2.
Afin de vérifier qu'ADMap atténue efficacement le problème de perturbation de l'ordre des points, nous avons proposé la distance moyenne de chanfrein (ACE). Nous avons sélectionné les instances prédites dont la somme des distances de chanfrein est inférieure à 1,5 et calculé leur distance de chanfrein moyenne (ACE). Plus l'ACE est petit, plus la prédiction de l'ordre des points d'instance est précise. Le tableau 8 prouve qu'ADMap peut atténuer efficacement le problème de perturbation des nuages de points.

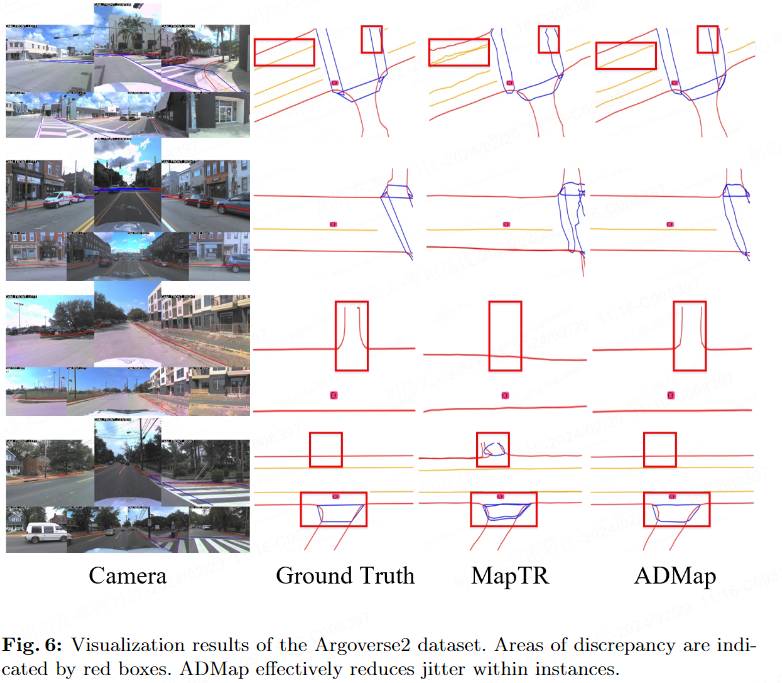
Les deux images suivantes montrent les résultats de visualisation de l'ensemble de données nuScenes et de l'ensemble de données Argoverse2.
ADMap est un cadre de reconstruction de carte vectorisée de haute précision efficace et efficient, qui atténue efficacement le phénomène de gigue ou d'irrégularité qui peut se produire dans l'ordre des vecteurs d'instance en raison d'un biais de prédiction. Des expériences approfondies montrent que la méthode proposée permet d'obtenir les meilleures performances sur les benchmarks nuScenes et Argoverse2. Nous pensons qu'ADMap contribuera à faire progresser la recherche sur les tâches de reconstruction de cartes vectorielles de haute précision, favorisant ainsi mieux le développement de la conduite autonome et d'autres domaines.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Qu'est-ce que la monnaie numérique
Qu'est-ce que la monnaie numérique
 Comment ouvrir les fichiers ESP
Comment ouvrir les fichiers ESP
 Comment désactiver la protection en temps réel dans le Centre de sécurité Windows
Comment désactiver la protection en temps réel dans le Centre de sécurité Windows
 Quelles sont les nouvelles fonctionnalités de Hongmeng OS 3.0 ?
Quelles sont les nouvelles fonctionnalités de Hongmeng OS 3.0 ?
 Comment débloquer un téléphone Oppo si j'ai oublié le mot de passe
Comment débloquer un téléphone Oppo si j'ai oublié le mot de passe
 Comment résoudre le problème que localhost ne peut pas être ouvert
Comment résoudre le problème que localhost ne peut pas être ouvert
 MySQL crée une procédure stockée
MySQL crée une procédure stockée
 Comment acheter et vendre du Bitcoin ? Tutoriel de trading Bitcoin
Comment acheter et vendre du Bitcoin ? Tutoriel de trading Bitcoin








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



