Ce robot s'appelle Cassie et a déjà établi un record du monde au 100 mètres. Récemment, des chercheurs de l'Université de Californie à Berkeley ont développé un nouvel algorithme d'apprentissage par renforcement profond, lui permettant de maîtriser des compétences telles que les virages serrés et de résister à diverses interférences.
 Des recherches sur la locomotion des robots bipèdes n'ont pas été menées depuis des décennies, mais elles continuent a été capable d'exécuter diverses compétences locomotrices. Un cadre général pour un contrôle robuste. Le défi vient de la complexité de la dynamique sous-actionnée des robots bipèdes et des différentes planifications associées à chaque compétence locomotrice.
Des recherches sur la locomotion des robots bipèdes n'ont pas été menées depuis des décennies, mais elles continuent a été capable d'exécuter diverses compétences locomotrices. Un cadre général pour un contrôle robuste. Le défi vient de la complexité de la dynamique sous-actionnée des robots bipèdes et des différentes planifications associées à chaque compétence locomotrice.
La question clé que les chercheurs espèrent résoudre est la suivante : comment développer une solution pour les robots bipèdes de grande dimension à taille humaine ? Comment contrôler des habiletés de mouvement des jambes diverses, agiles et robustes telles que la marche, la course et le saut ?
Une étude récente pourrait apporter une bonne solution.
Dans ce travail, des chercheurs de Berkeley et d'autres institutions utilisent l'apprentissage par renforcement (RL) pour créer des contrôleurs pour des robots bipèdes non linéaires de grande dimension dans le monde réel afin de relever les défis ci-dessus. Ces contrôleurs peuvent exploiter les informations proprioceptives du robot pour s'adapter à des dynamiques incertaines qui changent avec le temps, tout en étant capables de s'adapter à de nouveaux environnements et paramètres, en tirant parti de l'agilité du robot bipède pour présenter un comportement robuste dans des situations inattendues. De plus, notre cadre fournit une recette générale pour reproduire diverses compétences locomotrices bipèdes. Titre de l'article : Apprentissage par renforcement pour un contrôle de locomotion bipède polyvalent, dynamique et robusteLien de l'article : https://arxiv.org/pdf/2401.16889.pdf
Détails du papier
La haute dimensionnalité et la non-linéarité des robots bipèdes à taille humaine et à contrôle de couple peuvent à première vue apparaître comme des obstacles pour le contrôleur, mais ces caractéristiques ont l'avantage de permettre des implémentations complexes grâce aux dimensions élevées du robot. dynamique.
Les compétences que ce contrôleur confère au robot sont illustrées dans la figure 1, notamment se tenir debout de manière stable, marcher, courir et sauter. Ces compétences peuvent également être utilisées pour effectuer diverses tâches, notamment marcher à différentes vitesses et hauteurs, courir à différentes vitesses et dans différentes directions et sauter vers diverses cibles, tout en conservant leur robustesse pendant le déploiement réel. À cette fin, les chercheurs utilisent le RL sans modèle pour permettre aux robots d’apprendre par essais et erreurs la dynamique d’ordre complet du système. En plus des expériences réelles, les avantages de l'utilisation de RL pour le contrôle des mouvements des jambes sont analysés en profondeur et la manière de structurer efficacement le processus d'apprentissage pour exploiter ces avantages, tels que l'adaptabilité et la robustesse, est examinée en détail. 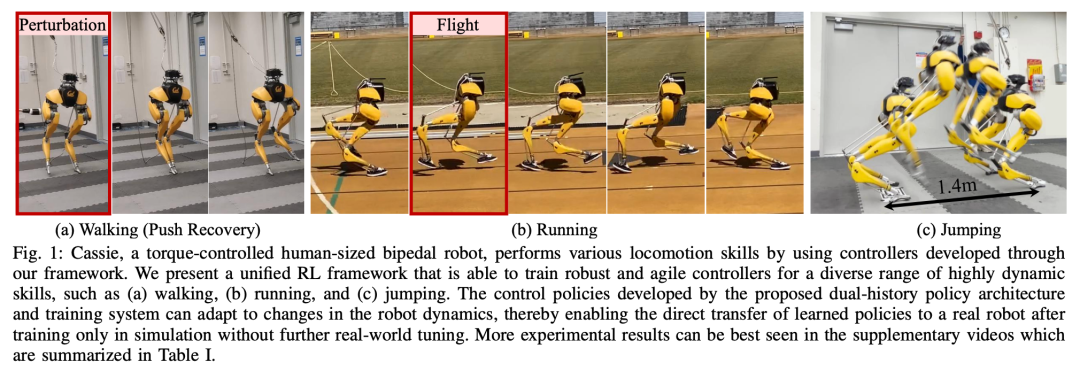 Le système RL pour le contrôle universel des mouvements bipèdes est illustré dans la figure 2 :
Le système RL pour le contrôle universel des mouvements bipèdes est illustré dans la figure 2 : 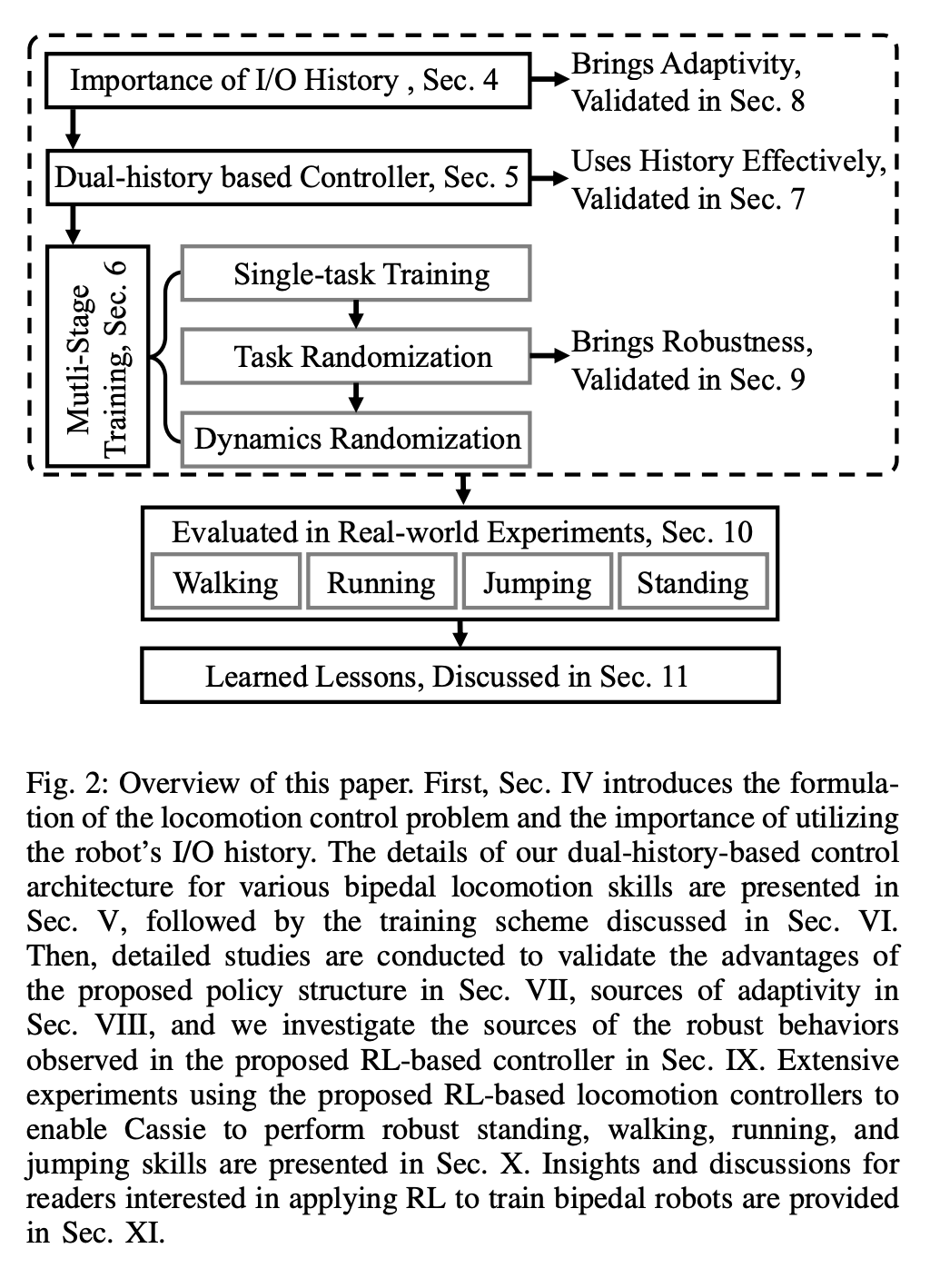 La section 4 présente d'abord l'importance de l'utilisation de l'historique des E/S du robot dans le contrôle des mouvements. Cette section du point de vue du contrôle et du RL. , il est démontré que l'historique des E/S à long terme du robot peut permettre l'identification du système et l'estimation de l'état dans le processus de contrôle en temps réel.
La section 4 présente d'abord l'importance de l'utilisation de l'historique des E/S du robot dans le contrôle des mouvements. Cette section du point de vue du contrôle et du RL. , il est démontré que l'historique des E/S à long terme du robot peut permettre l'identification du système et l'estimation de l'état dans le processus de contrôle en temps réel.
La section 5 présente le cœur de la recherche : une nouvelle architecture de contrôle qui utilise les doubles historiques d'E/S à long terme et à court terme des robots bipèdes. Plus précisément, cette architecture de contrôle exploite non seulement l’historique à long terme du robot, mais également son historique à court terme.
Le cadre de contrôle est le suivant : 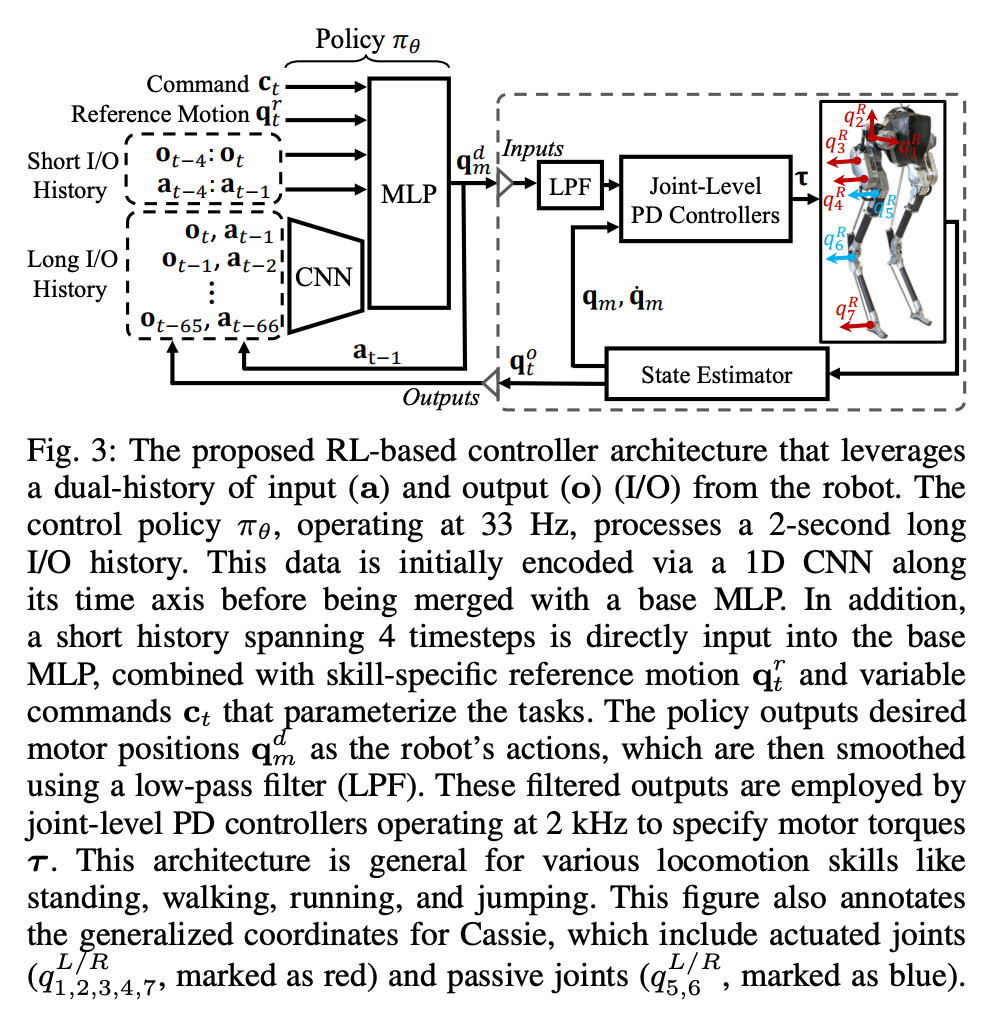 Dans cette structure à double historique, l'historique à long terme apporte de l'adaptabilité (vérifié dans la section 8), et l'historique à court terme est mieux mis en œuvre par l'utilisation L’historique à long terme est complété par un contrôle en temps réel (validé dans la section 7).
Dans cette structure à double historique, l'historique à long terme apporte de l'adaptabilité (vérifié dans la section 8), et l'historique à court terme est mieux mis en œuvre par l'utilisation L’historique à long terme est complété par un contrôle en temps réel (validé dans la section 7).
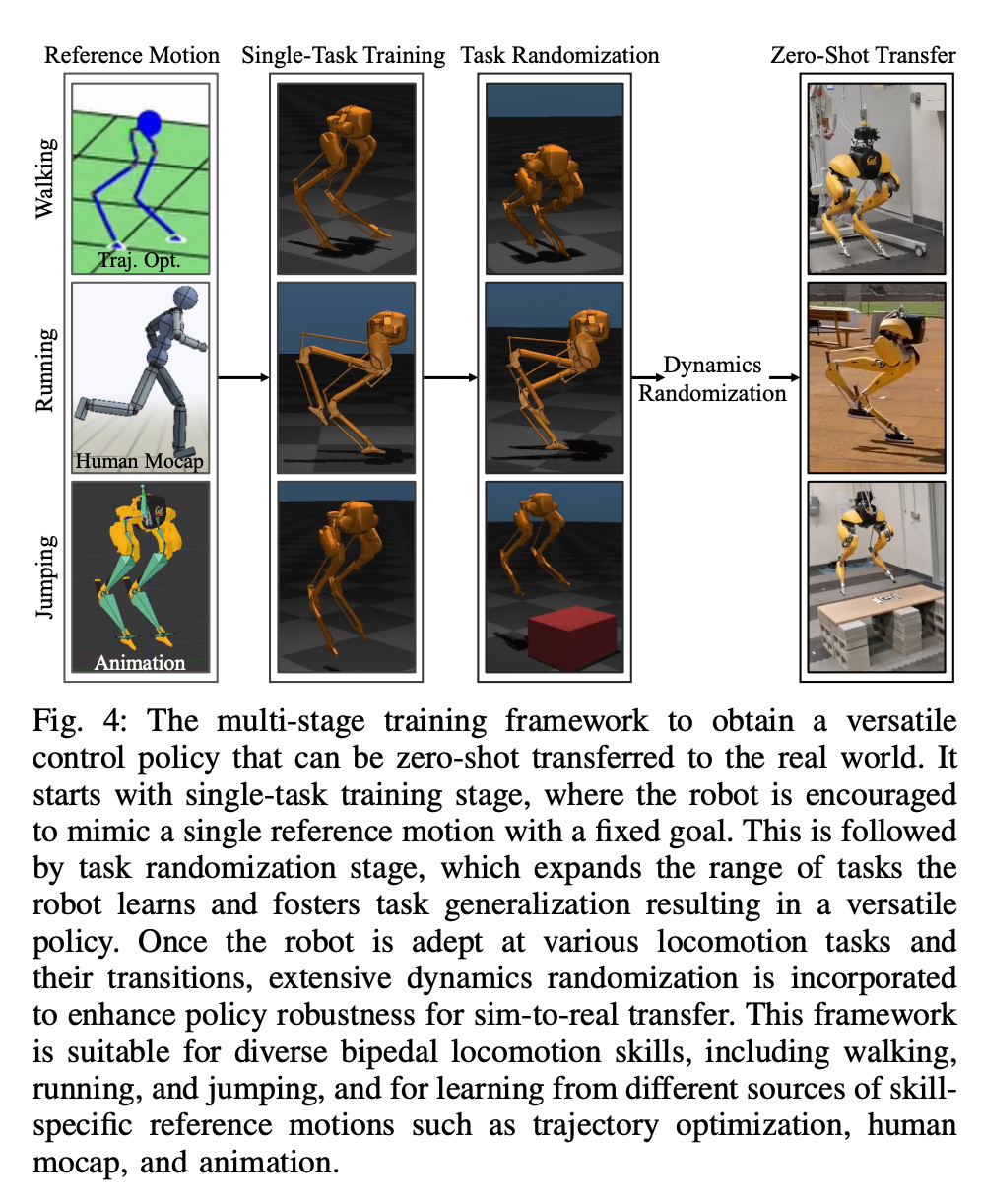
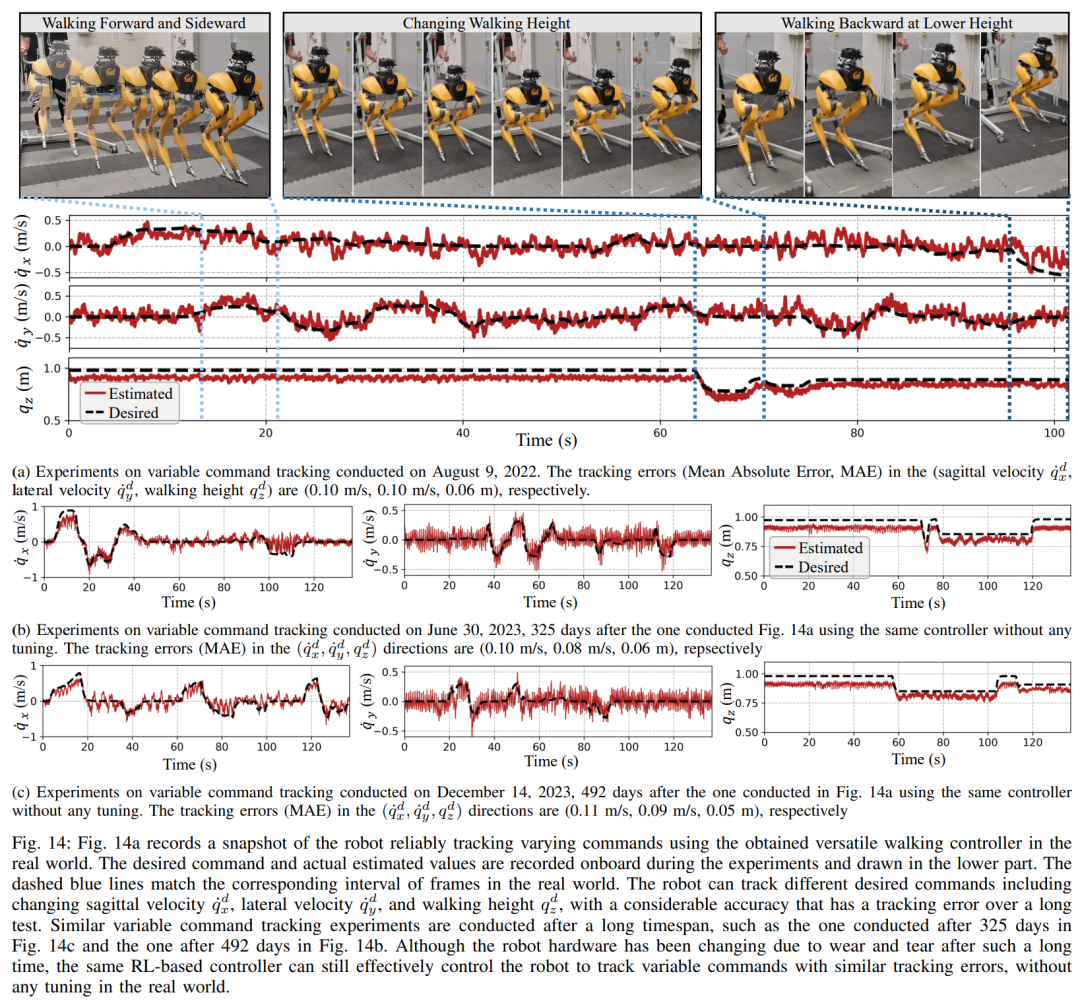
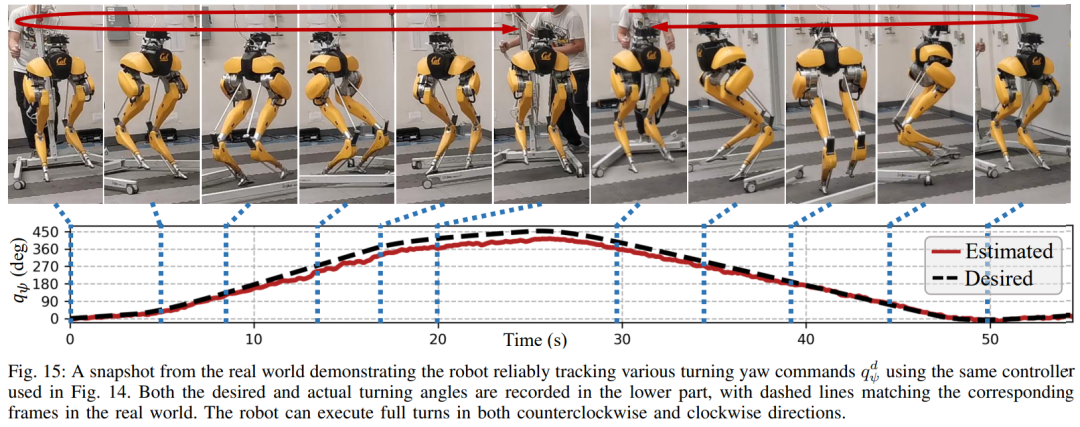
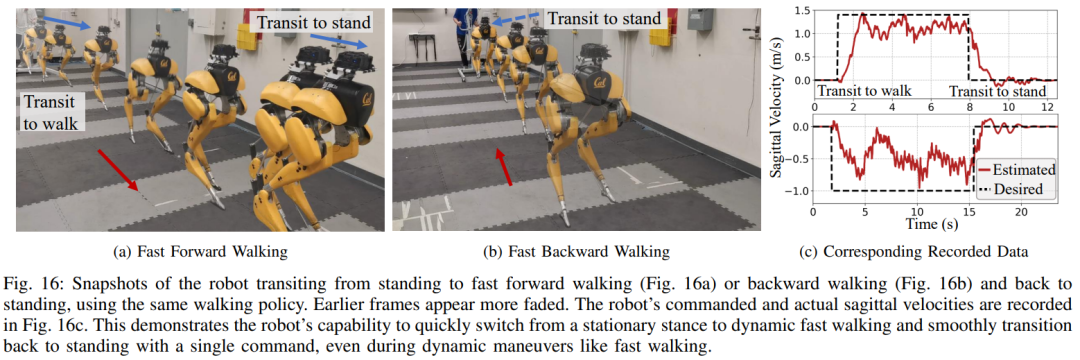
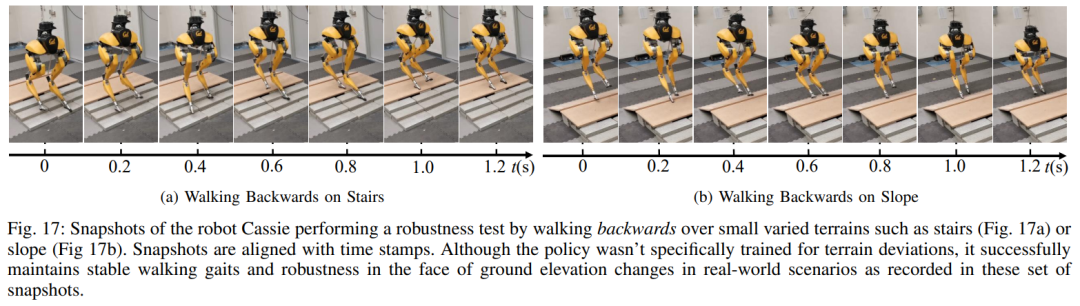
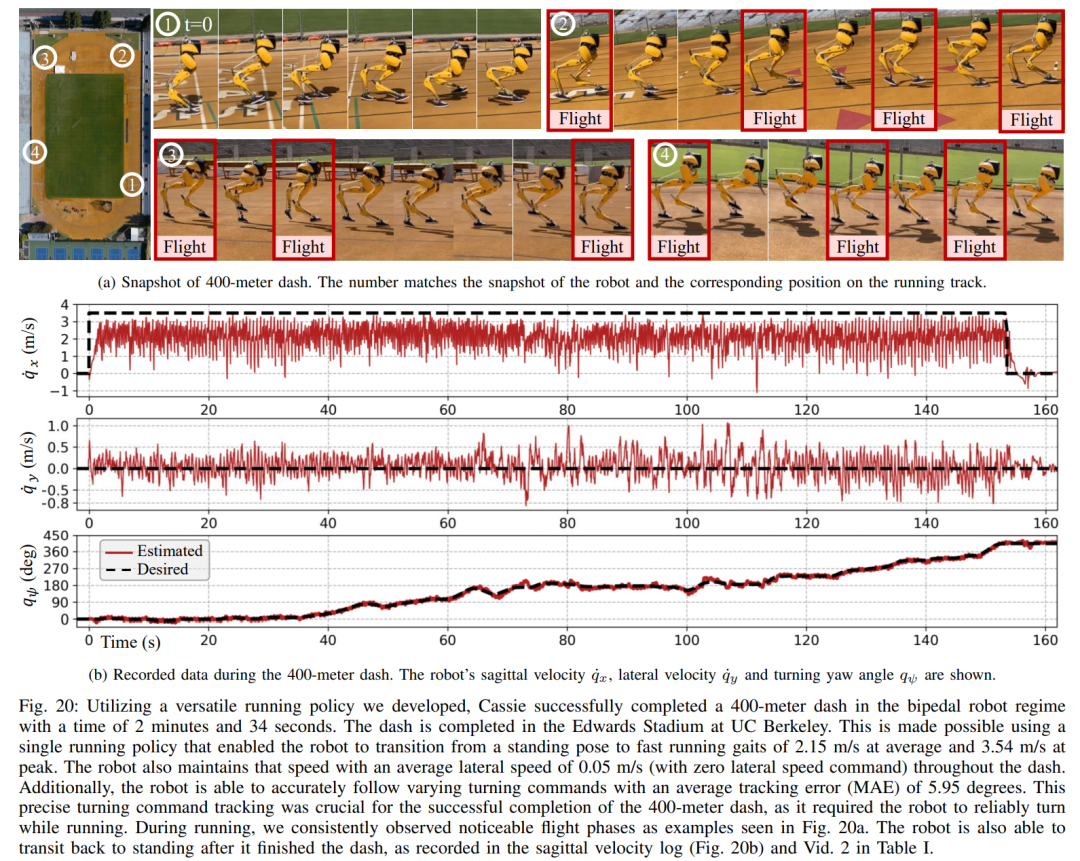
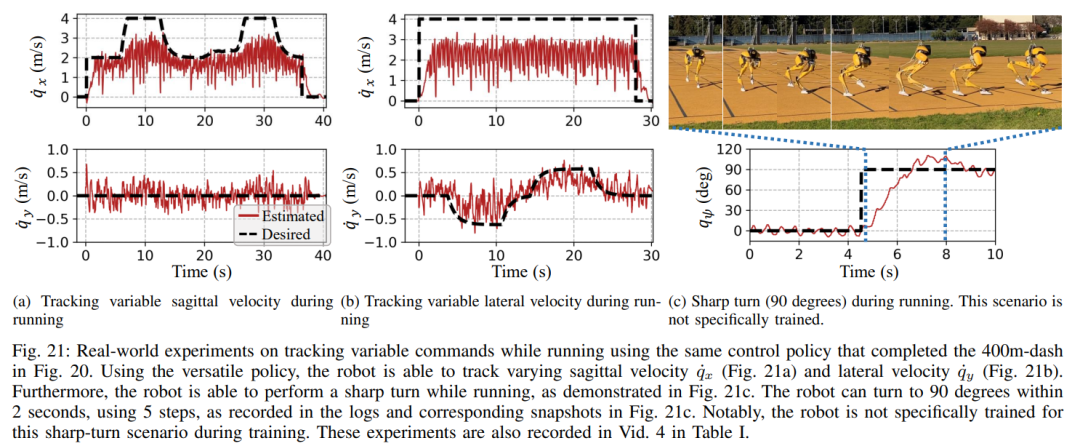
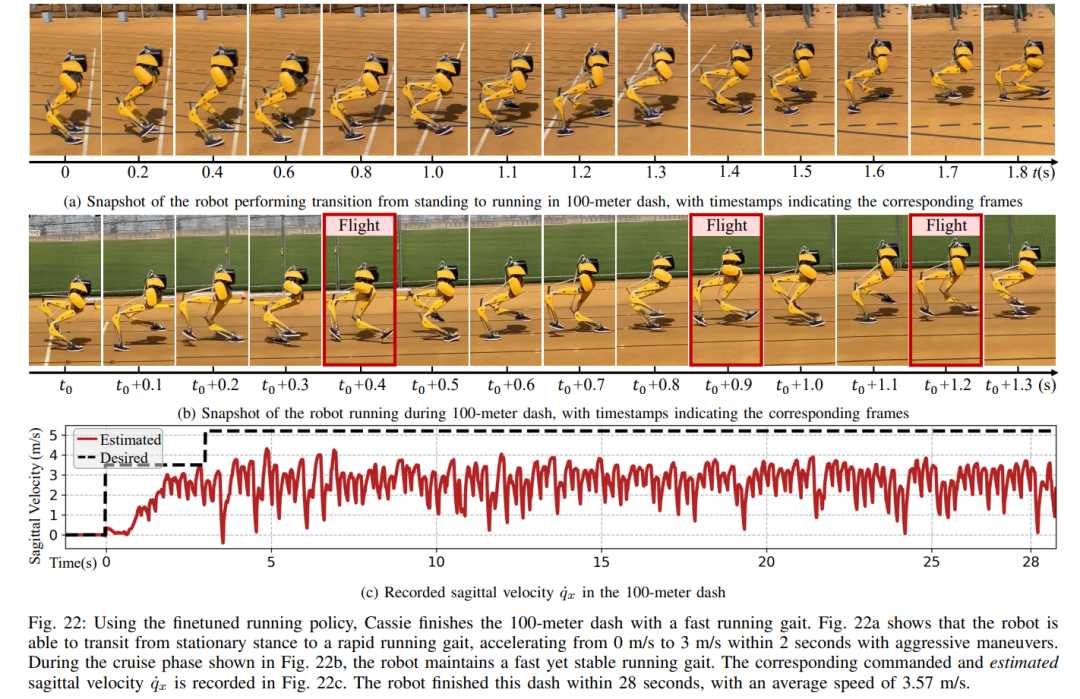
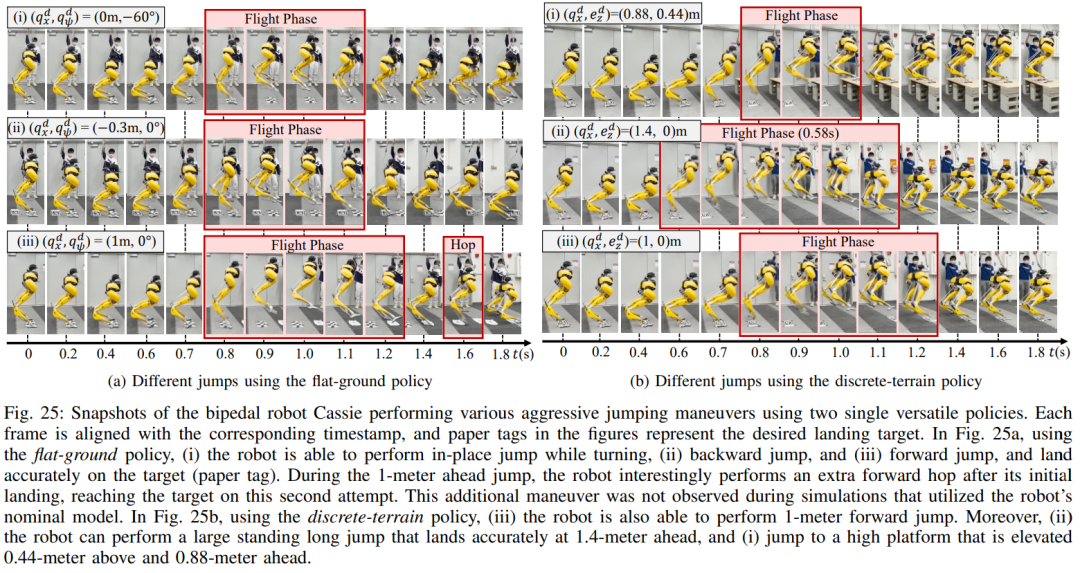
La section 6 présente comment les stratégies de contrôle représentées par des réseaux de neurones profonds peuvent être optimisées grâce au RL sans modèle. Étant donné que les chercheurs visaient à développer un contrôleur capable d’utiliser des capacités motrices hautement dynamiques pour accomplir diverses tâches, la formation de cette section est caractérisée par une formation par simulation en plusieurs étapes. Cette stratégie de formation propose un cours structuré, commençant par une formation à tâche unique, où le robot se concentre sur une tâche fixe, puis une randomisation des tâches, qui diversifie les tâches de formation que le robot reçoit, et enfin une randomisation dynamique, qui modifie les paramètres dynamiques du robot.La stratégie est présentée dans la figure ci-dessous : Cette stratégie de formation peut fournir une stratégie de contrôle polyvalente qui peut effectuer une variété de tâches et réaliser une migration sans échantillon du matériel du robot. De plus, la randomisation des tâches améliore également la robustesse de la politique résultante en se généralisant à différentes tâches d'apprentissage. La recherche montre que cette robustesse peut permettre aux robots de se comporter de manière conforme aux perturbations, ce qui est « orthogonal » aux perturbations provoquées par la randomisation dynamique. Ceci sera vérifié dans la section 9. À l'aide de ce cadre, les chercheurs ont obtenu une stratégie multifonctionnelle pour les compétences de marche, de course et de saut du robot bipède Cassie. Le chapitre 10 évalue l'efficacité de ces stratégies de contrôle dans le monde réel. Les chercheurs ont mené des expériences approfondies sur le robot, notamment en testant plusieurs capacités telles que marcher, courir et sauter dans le monde réel. Les stratégies utilisées sont toutes capables de contrôler efficacement des robots du monde réel après une formation par simulation sans autres ajustements. Comme le montre la figure 14a, la stratégie de marche démontre un contrôle efficace du robot en suivant différentes instructions. Pendant tout le processus de test, l'erreur de suivi est assez faible (l'erreur de suivi est. déterminé par la valeur du MAE à évaluer). De plus, la stratégie du robot fonctionne systématiquement bien sur de longues périodes de temps, avec la capacité de maintenir le suivi des commandes variables même après 325 et 492 jours, comme le montrent respectivement les figures 14c et 14b. Malgré des changements cumulatifs importants dans la dynamique du robot au cours de cette période, le même contrôleur de la figure 14a continue de gérer efficacement différentes tâches de marche avec une dégradation minimale de l'erreur de suivi. Comme le montre la figure 15, la stratégie utilisée dans cette étude a montré un contrôle fiable du robot, permettant au robot de suivre avec précision différentes commandes de rotation, dans le sens des aiguilles d'une montre ou dans le sens inverse. Expérience de marche rapide. En plus des vitesses de marche modérées, les expériences démontrent également la capacité de la stratégie utilisée à contrôler le robot pour qu'il effectue des actions de marche rapide en avant et en arrière, comme le montre la figure 16. Le robot peut passer d'un état statique pour atteindre rapidement une vitesse de marche vers l'avant, avec une vitesse moyenne de 1,14 m/s (1,4 m/s requis dans la commande de suivi). Le robot peut également revenir rapidement à une position debout selon la commande. , comme le montre la figure 16a, enregistrement de données sur la figure 16c. Sur un terrain accidenté (sans entraînement), le robot peut également marcher efficacement à reculons dans les escaliers ou en descente, comme le montre l'image ci-dessous. Anti-perturbation. Dans le cas de perturbations du pouls, par exemple, les chercheurs introduisent dans le robot des perturbations externes à court terme provenant de toutes les directions pendant que le robot marche. Comme indiqué sur la figure 18a, une force de perturbation latérale considérable est appliquée au robot lors de sa marche sur place, avec une vitesse latérale maximale de 0,5 m/s. Malgré la perturbation, le robot s'est rapidement remis des déviations latérales. Comme le montre la figure 18a, le robot se déplace habilement dans la direction latérale opposée, compensant efficacement la perturbation et rétablissant sa démarche stable de marche sur place. 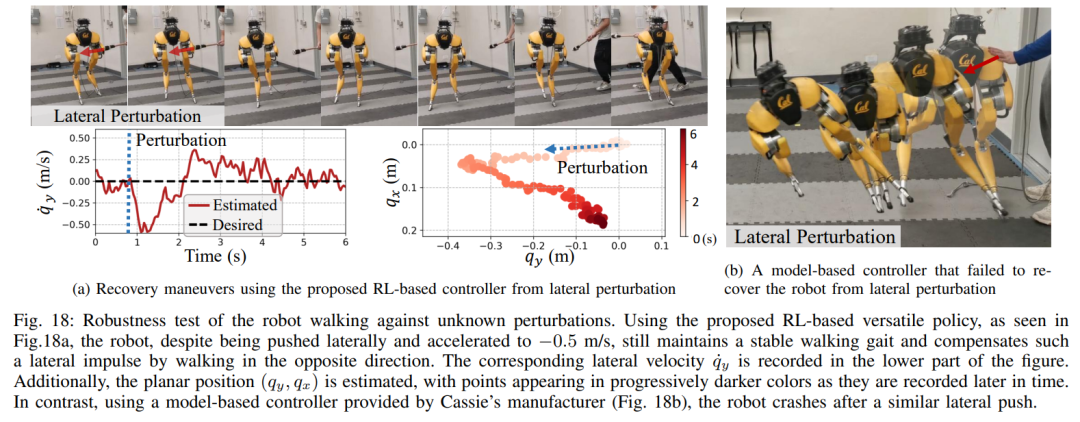 Pendant le test de perturbation continue, les humains ont appliqué une force de perturbation à la base du robot et ont traîné le robot dans des directions aléatoires tout en ordonnant au robot de marcher sur place. Comme le montre la figure 19a, lorsque le robot marche normalement, une force de traînée latérale continue est exercée sur la base de Cassie. Les résultats montrent que le robot se conforme à ces forces externes en suivant leur direction sans perdre son équilibre. Cela démontre également les avantages de la stratégie basée sur l'apprentissage par renforcement proposée dans cet article dans des applications potentielles telles que le contrôle de robots bipèdes pour obtenir une interaction homme-robot sûre. Lorsque le robot a utilisé une stratégie de course bipède, il a réalisé un sprint de 400 mètres en 2 minutes et 34 secondes, et un sprint de 100 mètres en 27,06 secondes, avec une course à pied inclinaison jusqu'à 10°, etc. Course de 400 mètres : L'étude a d'abord évalué les stratégies générales de course pour effectuer une course de 400 mètres sur une piste extérieure standard, comme le montre la figure 20.Tout au long du test, le robot a reçu l'ordre de répondre simultanément à différentes commandes de virage émises par l'opérateur à une vitesse de 3,5 m/s. Le robot est capable de passer en douceur de la position debout à la marche (Fig. 20a 1). Le robot a réussi à accélérer jusqu'à une vitesse de fonctionnement moyenne estimée de 2,15 m/s, atteignant une vitesse maximale estimée de 3,54 m/s, comme le montre la figure 20b. Cette stratégie a permis au robot de maintenir avec succès la vitesse souhaitée tout au long de la course de 400 mètres tout en obéissant avec précision aux différentes commandes de virage. Sous le contrôle de la stratégie de course proposée, Cassie a réussi le sprint de 400 m en 2 minutes et 34 secondes et a ensuite pu passer en position debout. L'étude a ensuite été menée avec un test de virage serré, au cours duquel le robot a reçu un changement progressif de la commande de lacet, de 0 degré directement à 90 degrés, comme indiqué sur la figure 21c. Le robot peut répondre à une telle commande de pas et effectuer un virage serré à 90 degrés en 2 secondes et 5 pas. Course de 100 mètres : Comme le montre la figure 22, en déployant la stratégie de course proposée, le robot a complété la course de 100 mètres en environ 28 secondes, réalisant le temps de course le plus rapide de 27,06 secondes. Grâce à des expériences, les chercheurs ont trouvé difficile d'entraîner le robot à tourner en sautant vers une plate-forme surélevée, mais la stratégie de saut proposée a permis d'obtenir une variété de bipèdes différents pour le robot. , notamment être capable de sauter de 1,4 mètre et de sauter sur une plate-forme surélevée de 0,44 mètre. Sauter et tourner : comme le montre la figure 25a, en utilisant une stratégie de saut unique, le robot peut effectuer divers sauts cibles donnés, comme sauter sur place lors d'une rotation de 60°, sauter en arrière et atterrir à 0,3 mètre derrière. . Sauter vers une plate-forme surélevée : comme le montre la figure 25b, le robot peut sauter avec précision vers des cibles situées à différents endroits, par exemple à 1 mètre devant ou à 1,4 mètre devant. Il peut également sauter vers des emplacements situés à différentes hauteurs, notamment. sautant à 0,44 mètre de haut (étant donné que le robot lui-même ne mesure que 1,1 mètre de haut). Pour plus d'informations, veuillez vous référer au document original.
Pendant le test de perturbation continue, les humains ont appliqué une force de perturbation à la base du robot et ont traîné le robot dans des directions aléatoires tout en ordonnant au robot de marcher sur place. Comme le montre la figure 19a, lorsque le robot marche normalement, une force de traînée latérale continue est exercée sur la base de Cassie. Les résultats montrent que le robot se conforme à ces forces externes en suivant leur direction sans perdre son équilibre. Cela démontre également les avantages de la stratégie basée sur l'apprentissage par renforcement proposée dans cet article dans des applications potentielles telles que le contrôle de robots bipèdes pour obtenir une interaction homme-robot sûre. Lorsque le robot a utilisé une stratégie de course bipède, il a réalisé un sprint de 400 mètres en 2 minutes et 34 secondes, et un sprint de 100 mètres en 27,06 secondes, avec une course à pied inclinaison jusqu'à 10°, etc. Course de 400 mètres : L'étude a d'abord évalué les stratégies générales de course pour effectuer une course de 400 mètres sur une piste extérieure standard, comme le montre la figure 20.Tout au long du test, le robot a reçu l'ordre de répondre simultanément à différentes commandes de virage émises par l'opérateur à une vitesse de 3,5 m/s. Le robot est capable de passer en douceur de la position debout à la marche (Fig. 20a 1). Le robot a réussi à accélérer jusqu'à une vitesse de fonctionnement moyenne estimée de 2,15 m/s, atteignant une vitesse maximale estimée de 3,54 m/s, comme le montre la figure 20b. Cette stratégie a permis au robot de maintenir avec succès la vitesse souhaitée tout au long de la course de 400 mètres tout en obéissant avec précision aux différentes commandes de virage. Sous le contrôle de la stratégie de course proposée, Cassie a réussi le sprint de 400 m en 2 minutes et 34 secondes et a ensuite pu passer en position debout. L'étude a ensuite été menée avec un test de virage serré, au cours duquel le robot a reçu un changement progressif de la commande de lacet, de 0 degré directement à 90 degrés, comme indiqué sur la figure 21c. Le robot peut répondre à une telle commande de pas et effectuer un virage serré à 90 degrés en 2 secondes et 5 pas. Course de 100 mètres : Comme le montre la figure 22, en déployant la stratégie de course proposée, le robot a complété la course de 100 mètres en environ 28 secondes, réalisant le temps de course le plus rapide de 27,06 secondes. Grâce à des expériences, les chercheurs ont trouvé difficile d'entraîner le robot à tourner en sautant vers une plate-forme surélevée, mais la stratégie de saut proposée a permis d'obtenir une variété de bipèdes différents pour le robot. , notamment être capable de sauter de 1,4 mètre et de sauter sur une plate-forme surélevée de 0,44 mètre. Sauter et tourner : comme le montre la figure 25a, en utilisant une stratégie de saut unique, le robot peut effectuer divers sauts cibles donnés, comme sauter sur place lors d'une rotation de 60°, sauter en arrière et atterrir à 0,3 mètre derrière. . Sauter vers une plate-forme surélevée : comme le montre la figure 25b, le robot peut sauter avec précision vers des cibles situées à différents endroits, par exemple à 1 mètre devant ou à 1,4 mètre devant. Il peut également sauter vers des emplacements situés à différentes hauteurs, notamment. sautant à 0,44 mètre de haut (étant donné que le robot lui-même ne mesure que 1,1 mètre de haut). Pour plus d'informations, veuillez vous référer au document original. Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!




 La différence entre Scilab et Matlab
La différence entre Scilab et Matlab
 Méthode de production de rapports Intouch
Méthode de production de rapports Intouch
 Les dix principaux échanges de devises numériques
Les dix principaux échanges de devises numériques
 Introduction à la méthode d'imbrication des répéteurs
Introduction à la méthode d'imbrication des répéteurs
 Le commutateur Bluetooth Win10 est manquant
Le commutateur Bluetooth Win10 est manquant
 Configurer les variables d'environnement Java
Configurer les variables d'environnement Java
 tutoriel d'installation de pycharm
tutoriel d'installation de pycharm
 chaîne de correspondance d'expression régulière Java
chaîne de correspondance d'expression régulière Java








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



