


Vous êtes-vous déjà demandé comment écrire des pilotes pour vos périphériques embarqués sous Linux ? Vous êtes-vous déjà demandé comment adapter votre pilote à différentes plates-formes matérielles et architectures sous Linux ? Avez-vous déjà réfléchi à la manière de permettre à votre pilote d'implémenter certaines fonctions avancées dans les systèmes Linux, telles que le branchement à chaud, la gestion de l'alimentation, le partage de périphériques, etc. ? Si ces problèmes vous intéressent, cet article vous présentera une méthode efficace pour atteindre ces objectifs : la plate-forme de pilotes de périphériques Linux. La plate-forme est une structure de données utilisée pour décrire les périphériques embarqués. Elle vous permet de transmettre les informations et les attributs des périphériques embarqués au noyau de manière simple et unifiée, réalisant ainsi l'identification du périphérique et le pilote. La plate-forme est également un mécanisme permettant d'atteindre l'indépendance matérielle. Elle vous permet de séparer la configuration et la gestion des périphériques embarqués du code du pilote de manière flexible et portable, obtenant ainsi une prise en charge multiplateforme. La plateforme est également un framework pour la mise en œuvre de fonctions avancées. Elle vous permet de définir et d'utiliser les interfaces et les protocoles de divers appareils embarqués de manière standard et universelle, réalisant ainsi le branchement à chaud, la gestion de l'alimentation, le partage d'appareils, etc. Cet article présentera en détail l'application et le rôle de la plate-forme dans les pilotes de périphériques Linux à partir des concepts de base de la plate-forme, des règles grammaticales, des méthodes d'écriture, du processus d'enregistrement, des méthodes de correspondance, etc., et vous aidera à maîtriser cette méthode utile et puissante.
Selon le modèle de périphérique Linux, un véritable périphérique Linux et un pilote doivent généralement être connectés à un bus. Pour les périphériques connectés à PCI, USB, etc., ce n'est naturellement pas un problème, mais dans les systèmes embarqués, l'indépendant. les contrôleurs de périphériques intégrés au système SoC et les périphériques montés dans l'espace mémoire du SoC ne sont pas rattachés à ce type de bus. Sur la base de ce contexte, Linux a conçu un bus virtuel appelé platform bus, le périphérique correspondant s'appelle platform_device et le pilote s'appelle platform_driver.
Modèles d'appareils compatibles
使得设备被挂接在一个总线上,因此,符合 Linux 2.6 的设备模型。其结果是,配套的 sysfs结点、设备电源管理都成为可能。
BSP et isolation du conducteur
在BSP中定义platform设备和设备使用的资源、设备的具体配置信息。而在驱动中,只需要通 过通用API去获取资源和数据,做到了板相关代码和驱动代码的分离,使得驱动具有更好的可 扩展性和跨平台性。
L'implémentation du périphérique Platform dans le noyau se trouve dans les deux fichiers include/linux/platform_device.h et drivers/base/platform.c. Son architecture logicielle est la suivante : 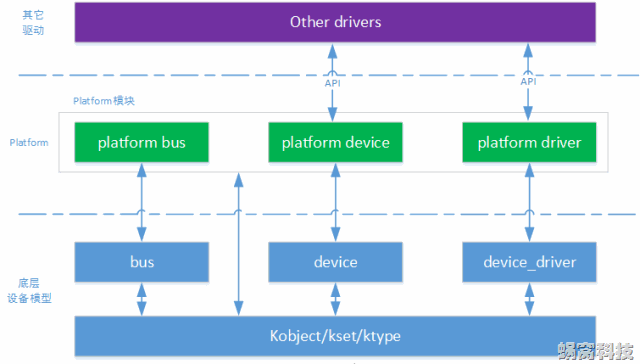
Comme le montre l'image, l'implémentation du périphérique Platform dans le noyau comprend principalement trois parties :
Notez que le soi-disant platform_device n'est pas un concept aux côtés des périphériques de caractères, des périphériques de bloc et des périphériques réseau, mais un moyen supplémentaire fourni par le système Linux, par exemple dans le processeur S3C2440, les contrôleurs I2C, RTC, SPI intégrés en interne. tels que LCD et watchdog sont tous classés comme platform_device, et ils sont eux-mêmes des périphériques de caractères.
/* defined in */
struct platform_device {
const char * name; / * 设备名 */
u32 id; /* 用于标识该设备的ID */
struct device dev; /* 真正的设备(Platform设备只是一个特殊的设备,
因此其核心逻辑还是由底层的模块实现)*/
u32 num_resources; / * 设备所使用各类资源数量 */
struct resource * resource; / * 资源 */
};
/* defined in */
struct resource {
resource_size_t start; /* 资源起始 */
resource_size_t end; /* 结束 */
const char *name;
unsigned long flags; /* 类型 */
struct resource *parent, *sibling, *child;
};
/* 设备驱动获取BSP定义的resource */
struct resource *platform_get_resource(struct platform_device *, unsigned int flags,
unsigned int num);
#include
int platform_device_register(struct platform_device *);
void platform_device_unregister(struct platform_device *);
Astuce : les descriptions des ressources étroitement liées au niveau du tableau sont placées dans dev.paltform_data.
platform_driver这个结构体中包含probe()、remove()、shutdown()、suspend()、resume()函数,通常也需要由驱动实现:
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*suspend_late)(struct platform_device *, pm_message_t state);
int (*resume_early)(struct platform_device *);
int (*resume)(struct platform_device *);
struct device_driver driver;
};
#include
int platform_driver_register(struct platform_driver *);
void platform_driver_unregister(struct platform_driver *);
系统中为platform总线定义了一个bus_type的实例platform_bus_type:
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.pm = PLATFORM_PM_OPS_PTR,
};
EXPORT_SYMBOL_GPL(platform_bus_type);
这里要重点关注其 match()成员函数,正是此成员函数确定了 platform_device 和 platform_driver之间如何匹配:
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev;
pdev = container_of(dev, struct platform_device, dev);
return (strncmp(pdev->name, drv->name, BUS_ID_SIZE) == 0);
}
通过本文,我们了解了platform在Linux设备驱动中的应用和作用,学习了如何编写、注册、匹配、修改和调试platform。我们发现,platform是一种非常适合嵌入式系统开发的方法,它可以让我们方便地描述和管理嵌入式设备,实现硬件无关性和高级功能。当然,platform也有一些注意事项和限制,比如需要遵循语法规范、需要注意兼容性问题、需要注意内存占用和性能影响等。因此,在使用platform时,我们需要有一定的硬件知识和经验,以及良好的编程习惯和调试技巧。希望本文能够为你提供一个入门级的指导,让你对platform有一个初步的认识和理解。如果你想深入学习platform,建议你参考更多的资料和示例,以及自己动手实践和探索。
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



