


Nat. Commun. : Le robot imite l'évolution des têtards et acquiert de nouvelles compétences !
Un têtard ne peut nager que dans l'eau, mais lorsqu'il se transforme en grenouille, il peut avoir la capacité d'être amphibie sur terre et sur l'eau. Le même robot ne peut pas être bon dans de nombreux sports en raison des limites de sa forme corporelle. Mais les robots peuvent acquérir de nouvelles compétences grâce à la transformation.
Inconvénients des robots transformateurs traditionnels
Cependant, les robots traditionnels à changement de forme ont toujours reposé sur des équipements externes volumineux, tels que de gros moteurs et mécanismes de transmission, limitant ainsi leur flexibilité et leur polyvalence. Ceci est évidemment différent des animaux dans la nature, qui sont mûs par des muscles et possèdent de riches capacités de détection et de contrôle.
Récemment, des chercheurs de l'Université de Yale et de l'Université d'État du Colorado ont publié une étude innovante dans la revue de renommée mondiale « Nature Communications », qui a complètement changé la façon dont les robots traditionnels se déforment. Les chercheurs ont réussi à intégrer des fonctions d'actionnement, de détection et de verrouillage directement dans la structure interne du robot, éliminant ainsi le besoin de matériel externe encombrant.
Principe
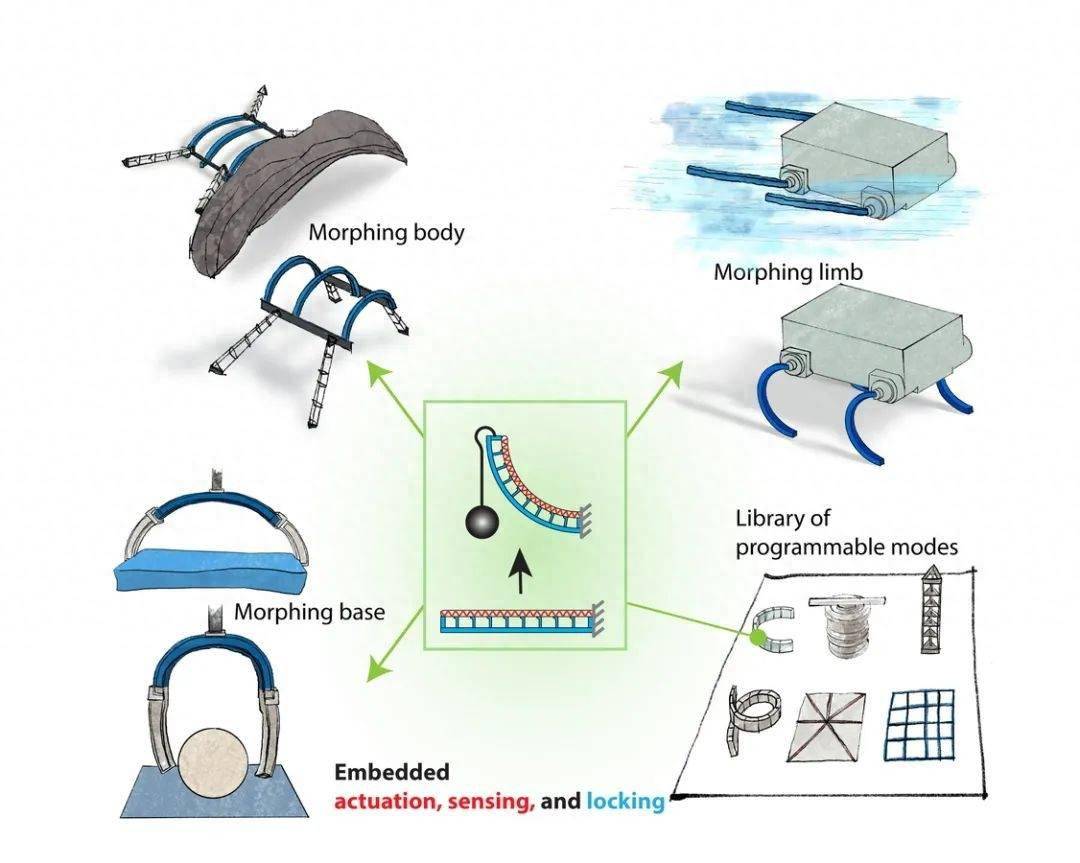
Le cœur de cette technologie innovante consiste à combiner des muscles artificiels légers avec des polymères à mémoire de forme (SMP). Les muscles artificiels peuvent se contracter en réponse à un courant électrique, tandis que les SMP peuvent basculer entre des états rigides et mous pour verrouiller la forme du robot. La particularité de cette approche est qu’elle intègre entièrement toutes ces fonctions dans le corps du robot sans nécessiter de structures mécaniques ni de transmissions complexes.
Comme les humains, ce robot peut également être capable de détecter ses propres changements de forme et d'obtenir un contrôle précis.

Applications
Cette technologie de déformation embarquée offre un large éventail de perspectives d’applications pratiques et est totalement révolutionnaire. L'équipe de recherche a démontré la polyvalence de la technologie dans divers systèmes robotiques. Par exemple, nous avons démontré une pince qui ajuste la taille de son squelette en fonction de la taille de l'objet. De cette façon, la grande mâchoire de serrage peut serrer de petites formes, et la petite mâchoire de serrage peut serrer de grandes formes
La pince à changement de forme à détection automatique peut s'adapter à différentes tâches de préhension et le robot quadrupède peut ajuster la forme de son corps en fonction des conditions du sol. Par exemple, vous pouvez ramper à travers un petit espace, puis modifier la forme de votre corps pour vous lever et marcher plus vite. Lorsque vous devez traverser un pont plus petit, vous pouvez tenir le pont et grimper dessus

Le robot peut changer la forme de ses membres si nécessaire pour s'adapter à différents environnements et tâches. Par exemple, si les jambes d'un robot passent de droites à courbées, il peut grimper à terre et bouger,
Lorsque les pieds passent de pliés à droits, vous pouvez retourner à l'eau et nager

Contenu réécrit comme : Potentiel illimité
Dans cette recherche, l'un des résultats les plus frappants est la création d'un ensemble de bibliothèques de modules de déformation intégrés qui peuvent réaliser des changements de forme programmables, notamment la torsion, la flexion tridimensionnelle et la déformation de surface. Cette bibliothèque présente des méthodes intégrées pour permettre aux robots de faire face à divers défis
L’impact de cette recherche révolutionnaire sera considérable. Les changements morphologiques intégrés améliorent non seulement la capacité du robot à interagir avec son environnement, mais offrent également de nouvelles possibilités d'applications dans les domaines de la recherche et du sauvetage, de l'exploration, des soins de santé et de l'automatisation industrielle. Les robots peuvent basculer de manière transparente entre différentes formes et fonctions, ce qui apporte une polyvalence sans précédent au domaine de la robotique
Veuillez cliquer sur le lien ci-dessous pour consulter le document :
Le contenu à réécrire est : https://www.nature.com/articles/s41467-023-41708-6
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Outil d'expression régulière
Outil d'expression régulière
 Comment modifier le nom d'un fichier sous Linux
Comment modifier le nom d'un fichier sous Linux
 Méthode de saisie de référence absolue
Méthode de saisie de référence absolue
 Introduction aux caractéristiques de l'espace virtuel
Introduction aux caractéristiques de l'espace virtuel
 Le rôle du mode Ne pas déranger d'Apple
Le rôle du mode Ne pas déranger d'Apple
 Comment résoudre le problème selon lequel TeamViewer ne peut pas se connecter
Comment résoudre le problème selon lequel TeamViewer ne peut pas se connecter
 barre de défilement div
barre de défilement div
 Utilisation de la fonction isalpha
Utilisation de la fonction isalpha








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



