


Nous explorerons les complexités de l'automatisation des robots pour maisons mobiles et nous concentrerons sur les défis uniques liés à la mise en place pour surmonter diverses limitations afin de garantir aux utilisateurs un démarrage en douceur

Dans un article précédent, j'ai expliqué comment utiliser la technologie April Tag pour automatiser les robots domestiques. Un énorme défi lorsqu’il s’agit d’automatiser des robots domestiques ou d’autres robots est la configuration de l’appareil. Dans le monde des appareils, des téléphones et des applications mobiles, les appareils sont généralement connectés à l'appareil hôte via USB, et l'appareil est toujours connecté à une source d'alimentation. Cependant, pour tester des robots, un défi unique se pose : comment effectuer les tests pendant que le robot est en mouvement. Parce qu'il ne peut pas être connecté au périphérique hôte via une connexion filaire physique. Alors, comment devrions-nous vérifier l’expérience de déballage ? Ne vous inquiétez pas, je vais l'expliquer dans cet article
Après vous avoir donné une brève introduction aux différents défis de la phase de configuration dans les tests d'automatisation de bot, permettez-moi d'approfondir d'autres défis
bot Être en déplacement et ne pas avoir de connexion physique filaire avec l'appareil hôte. Cela peut être possible pour certains tests au niveau des composants, mais pas pour les tests de bout en bout (E2E).
L'expérience prête à l'emploi se produit lorsque l'appareil n'est pas connecté au WiFi. Comment l’appareil hôte interagit-il avec l’appareil lorsqu’il est neuf ? Il s'agit d'une situation très courante lors des tests quotidiens des robots
Lorsqu'une erreur ou une exception se produit dans le robot, des opérations de récupération sont nécessaires. L'objectif principal des tests automatisés est de découvrir les problèmes logiciels et matériels potentiels du robot. Si nous rencontrons un problème, comment devons-nous signaler et récupérer l'appareil ?
La batterie du robot est sur le point de s'épuiser et nous avons besoin d'une source d'alimentation fiable pour charger le robot
Il est très important d'étendre la même configuration à plusieurs environnements de laboratoire et domestiques. En effet, nous ne pouvons pas simplement signer ou tester le bot dans un seul environnement
Abordons ces problèmes par ordre chronologique. Il peut être réécrit comme suit : Résolvons ces problèmes dans l'ordre chronologique
L'important est de résoudre ce problème. Prenons le cas d'un robot situé dans un laboratoire d'automatisation de tests. Il existe un périphérique hôte connecté au réseau interne de l'entreprise qui est utilisé pour envoyer et recevoir des commandes et accéder à divers codes sources, outils internes et infrastructures. Nous connecterons un Raspberry Pi à l'appareil et exécuterons un service REST sur le Raspberry Pi pour communiquer avec l'appareil hôte et l'appareil. Vous trouverez ci-dessous une illustration montrant la configuration
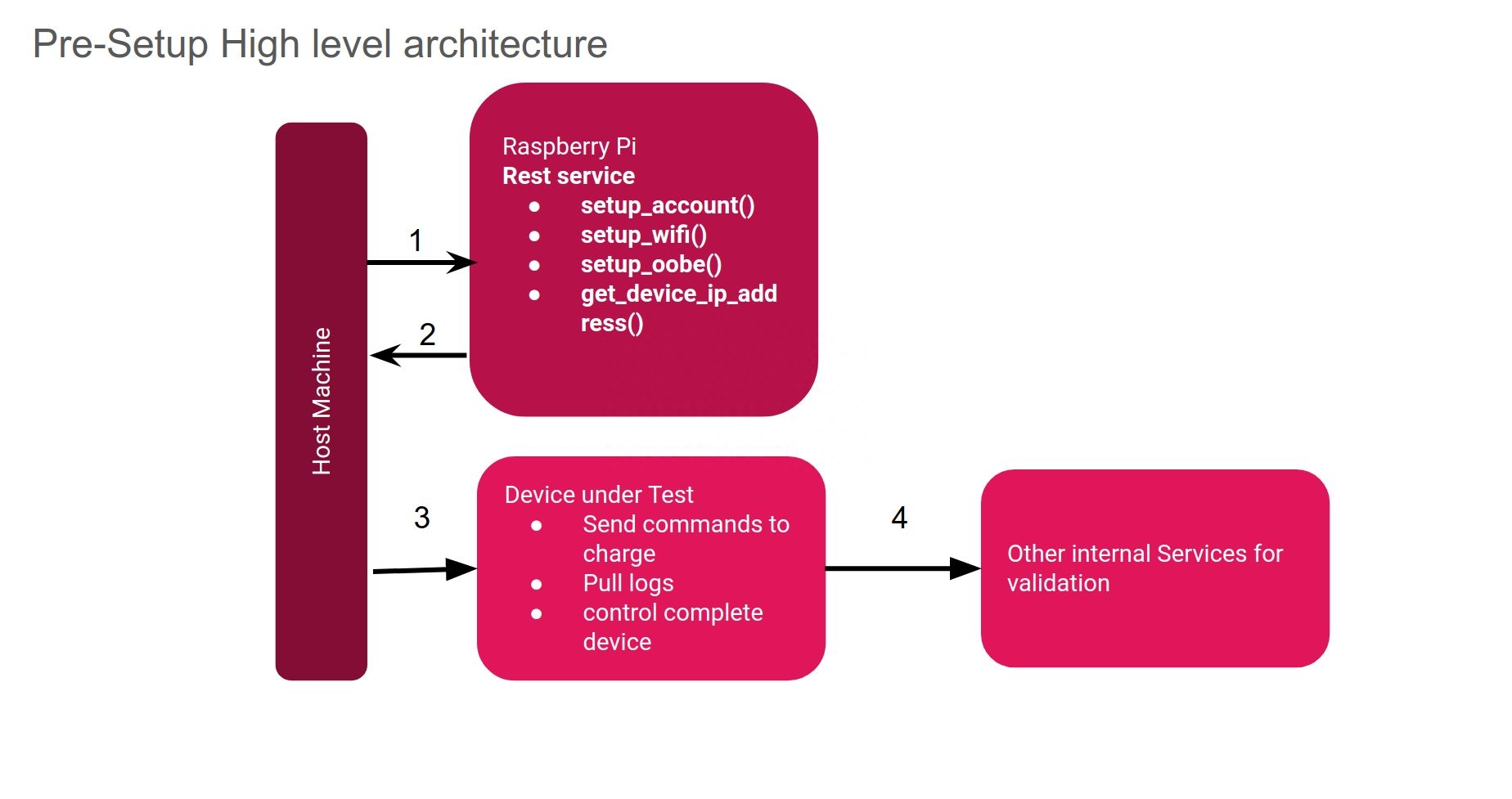
Voyons maintenant comment préconfigurer l'environnement de test avec Raspberry Pi . Ensuite, nous explorerons comment résoudre le problème de l'appareil qui ne parvient pas à se connecter au Wifi lorsqu'il est prêt à l'emploi
Quel est le rôle des services RESTful sur le Raspberry Pi ? Quels points de terminaison un service RESTful doit-il contenir ?
Il nous est maintenant très facile de connecter l'appareil via sans fil et l'appareil est prêt pour nos tests Soyez prêt
C'est une situation très courante. Ne soyez pas submergé ou frustré par ce genre de questions. À ce stade, nous devons utiliser les composants de bas niveau de l’appareil pour ramener l’appareil à son emplacement d’origine. Par exemple, comme je l'ai mentionné dans mon article précédent avec diverses piles logicielles, nous avons besoin d'accéder à la plate-forme ou à la couche de mobilité pour ramener le robot à sa position d'origine. C'est la chose la plus délicate et la plus difficile à faire, alors utilisez une autre technologie comme April Tag ou d'autres systèmes externes pour faire reculer l'appareil. Cela m'amène à ma prochaine question, qui est de remettre l'appareil sur la station de chargement en vue du prochain test
L'utilisation de commandes de bas niveau peut améliorer la fiabilité lors de la remise en place de l'appareil sur le station de chargement. Taux d'échec inférieur et efficacité supérieure à l'utilisation de commandes de mouvement ou de navigation de haut niveau et de pilotes de plate-forme ou de couche de mobilité
Conseils de configuration étendus pour plusieurs environnements de test :
L'automatisation robotique n'est pas une affaire simple et nécessite en fin de compte beaucoup de travail de conception et la prise en compte d'autres options disponibles sur le marché. Il n’existe pas de solution unique adaptée à toutes les situations. Avant d'adopter la solution finale, je recommande de réaliser une preuve de concept
Compte tenu de la nature et de la complexité des problèmes auxquels nous sommes confrontés, une question courante est de savoir s'il existe des alternatives. Bref, la réponse est oui. Nous pouvons tester efficacement en utilisant des émulateurs/émulateurs pour couvrir la plupart des cas d'utilisation que nous décrivons, mais rien ne remplace les tests d'appareils réels
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Quelles sont les techniques de test courantes ?
Quelles sont les techniques de test courantes ?
 Le rôle de Vulkan
Le rôle de Vulkan
 Comment acheter du Bitcoin
Comment acheter du Bitcoin
 Windows ne trouve pas la solution au certificat
Windows ne trouve pas la solution au certificat
 Introduction aux touches de raccourci de capture d'écran dans Win11
Introduction aux touches de raccourci de capture d'écran dans Win11
 Comment résoudre l'erreur de base de données Discuz
Comment résoudre l'erreur de base de données Discuz
 Expressions couramment utilisées en php
Expressions couramment utilisées en php
 Comment résoudre le rapport d'erreur
Comment résoudre le rapport d'erreur








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



