


Lors de l'insertion de l'élément i (i>=1), le tableau précédent[0],tableau[1],…,tableau[i -1 ] a été trié. À ce stade, comparez array[i] avec array[i-1], array[i-2],... pour trouver la position d'insertion et insérez array[i]. Reculez dans l’ordre.
Plus les données sont proches de la commande, moins il faut de temps pour insérer directement le tri.
Complexité temporelle : O(N^2)
Complexité spatiale O(1), c'est un algorithme stable
Tri par insertion directe :
public static void insertSort(int[] array){
for (int i = 1; i < array.length; i++) {
int tmp=array[i];
int j=i-1;
for(;j>=0;--j){
if(array[j]>tmp){
array[j+1]=array[j];
}else{
break;
}
}
array[j+1]=tmp;
}
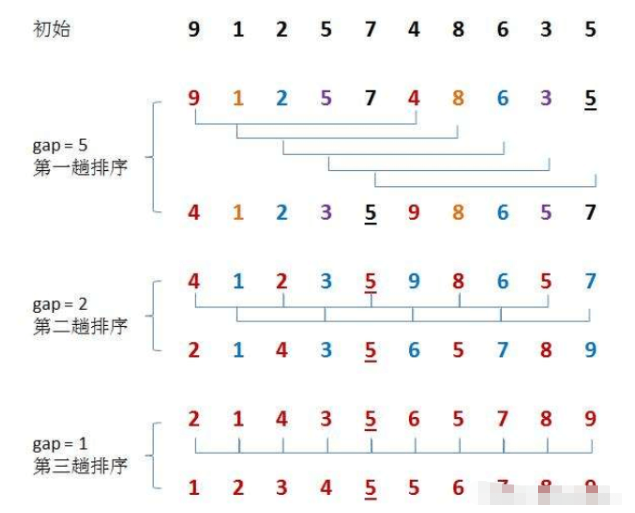
}public static void shellSort(int[] array){
int size=array.length;
//这里定义gap的初始值为数组长度的一半
int gap=size/2;
while(gap>0){
//间隔为gap的直接插入排序
for (int i = gap; i < size; i++) {
int tmp=array[i];
int j=i-gap;
for(;j>=0;j-=gap){
if(array[j]>tmp){
array[j+gap]=array[j];
}else{
break;
}
}
array[j+gap]=tmp;
}
gap/=2;
}
} 2. Tri par sélection
2. Tri par sélection
La complexité spatiale est O(1), instable
Tri par sélection :
//交换
private static void swap(int[] array,int i,int j){
int tmp=array[i];
array[i]=array[j];
array[j]=tmp;
}
//选择排序
public static void chooseSort(int[] array){
for (int i = 0; i < array.length; i++) {
int minIndex=i;//记录最小值的下标
for (int j = i+1; j < array.length; j++) {
if (array[j]<array[minIndex]) {
minIndex=j;
}
}
swap(array,i,minIndex);
}
} 2. Tri par tas
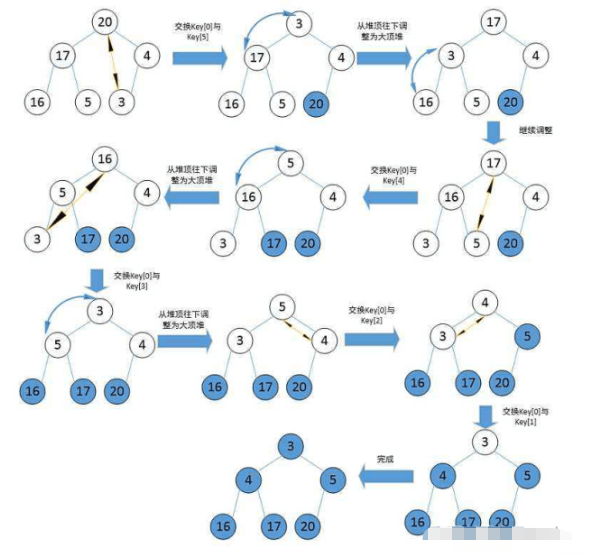
2. Tri par tasComplexité spatiale : O(N), instable
Tri par tas :
//向下调整
public static void shiftDown(int[] array,int parent,int len){
int child=parent*2+1;
while(child<len){
if(child+1<len){
if(array[child+1]>array[child]){
child++;
}
}
if(array[child]>array[parent]){
swap(array,child,parent);
parent=child;
child=parent*2+1;
}else{
break;
}
}
}
//创建大根堆
private static void createHeap(int[] array){
for (int parent = (array.length-1-1)/2; parent >=0; parent--) {
shiftDown(array,parent,array.length);
}
}
//堆排序
public static void heapSort(int[] array){
//创建大根堆
createHeap(array);
//排序
for (int i = array.length-1; i >0; i--) {
swap(array,0,i);
shiftDown(array,0,i);
}
} 3. Tri par échange
3. Tri par échange Complexité temporelle : O(N^2)
La complexité spatiale est O(1), qui est un tri stable
Tri à bulles :
public static void bubbleSort(int[] array){
for(int i=0;i<array.length-1;++i){
int count=0;
for (int j = 0; j < array.length-1-i; j++) {
if(array[j]>array[j+1]){
swap(array,j,j+1);
count++;
}
}
if(count==0){
break;
}
}
} Tri rapide
Tri rapideComplexité temporelle : Meilleur O(n*logn) : La séquence à trier peut être divisée aussi uniformément que possible à chaque fois
Pire O(N^2) : La séquence à trier elle-même est ordonnée
Complexité spatiale : O(logn) au mieux, O(N) au pire. Tri instable
(1) Méthode de fouille
Lorsque les données sont ordonnées, le tri rapide équivaut à un arbre binaire sans sous-arbres gauche ou droit. À ce moment, la complexité spatiale atteindra O(N). quantité de données Le tri peut provoquer un débordement de pile.
public static void quickSort(int[] array,int left,int right){
if(left>=right){
return;
}
int l=left;
int r=right;
int tmp=array[l];
while(l<r){
while(array[r]>=tmp&&l<r){
//等号不能省略,如果省略,当序列中存在相同的值时,程序会死循环
r--;
}
array[l]=array[r];
while(array[l]<=tmp&&l<r){
l++;
}
array[r]=array[l];
}
array[l]=tmp;
quickSort(array,0,l-1);
quickSort(array,l+1,right);
}(2) Optimisation du tri rapide
Choisissez la clé en prenant le milieu de trois nombres
Concernant la sélection des valeurs clés, si la séquence à trier est dans l'ordre, alors on sélectionne la première ou la dernière selon la clé qui peut conduire à une segmentation Le côté gauche ou droit de est vide. Dans ce cas, la complexité spatiale du tri rapide sera relativement grande, ce qui peut facilement provoquer un débordement de pile. Nous pouvons alors utiliser la méthode des trois nombres pour annuler cette situation. La valeur médiane du premier, du dernier et du milieu des éléments de la séquence est utilisée comme valeur clé.
//key值的优化,只在快速排序中使用,则可以为private
private int threeMid(int[] array,int left,int right){
int mid=(left+right)/2;
if(array[left]>array[right]){
if(array[mid]>array[left]){
return left;
}
return array[mid]<array[right]?right:mid;
}else{
if(array[mid]<array[left]){
return left;
}
return array[mid]>array[right]?right:mid;
}
}Lors d'une récursion dans une petite sous-plage, vous pouvez envisager d'utiliser le tri par insertion
随着我们递归的进行,区间会变的越来越小,我们可以在区间小到一个值的时候,对其进行插入排序,这样代码的效率会提高很多。
(3)快速排序的非递归实现
//找到一次划分的下标
public static int patition(int[] array,int left,int right){
int tmp=array[left];
while(left<right){
while(left<right&&array[right]>=tmp){
right--;
}
array[left]=array[right];
while(left<right&&array[left]<=tmp){
left++;
}
array[right]=array[left];
}
array[left]=tmp;
return left;
}
//快速排序的非递归
public static void quickSort2(int[] array){
Stack<Integer> stack=new Stack<>();
int left=0;
int right=array.length-1;
stack.push(left);
stack.push(right);
while(!stack.isEmpty()){
int r=stack.pop();
int l=stack.pop();
int p=patition(array,l,r);
if(p-1>l){
stack.push(l);
stack.push(p-1);
}
if(p+1<r){
stack.push(p+1);
stack.push(r);
}
}
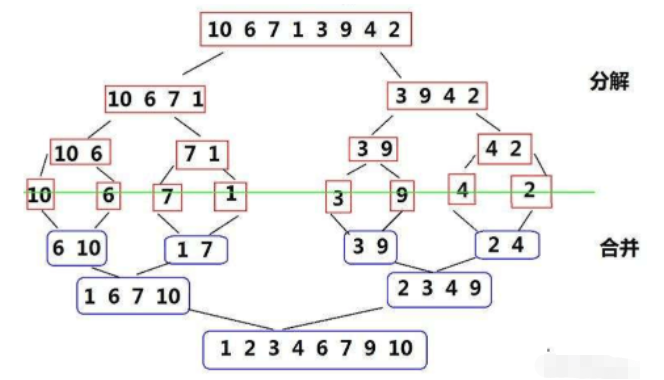
}归并排序(MERGE-SORT):该算法是采用分治法(Divide and Conquer)的一个非常典型的应用。实现序列的完全有序,需要将已经有序的子序列合并,即先让每个子序列有序,然后再将相邻的子序列段有序。若将两个有序表合并成一个有序表,称为二路归并。
时间复杂度:O(n*logN)(无论有序还是无序)
空间复杂度:O(N)。是稳定的排序。
//归并排序:递归
public static void mergeSort(int[] array,int left,int right){
if(left>=right){
return;
}
int mid=(left+right)/2;
//递归分割
mergeSort(array,left,mid);
mergeSort(array,mid+1,right);
//合并
merge(array,left,right,mid);
}
//非递归
public static void mergeSort1(int[] array){
int gap=1;
while(gap<array.length){
for (int i = 0; i < array.length; i+=2*gap) {
int left=i;
int mid=left+gap-1;
if(mid>=array.length){
mid=array.length-1;
}
int right=left+2*gap-1;
if(right>=array.length){
right=array.length-1;
}
merge(array,left,right,mid);
}
gap=gap*2;
}
}
//合并:合并两个有序数组
public static void merge(int[] array,int left,int right,int mid){
int[] tmp=new int[right-left+1];
int k=0;
int s1=left;
int e1=mid;
int s2=mid+1;
int e2=right;
while(s1<=e1&&s2<=e2){
if(array[s1]<=array[s2]){
tmp[k++]=array[s1++];
}else{
tmp[k++]=array[s2++];
}
}
while(s1<=e1){
tmp[k++]=array[s1++];
}
while(s2<=e2){
tmp[k++]=array[s2++];
}
for (int i = left; i <= right; i++) {
array[i]=tmp[i-left];
}
}| 排序方法 | 最好时间复杂度 | 最坏时间复杂度 | 空间复杂度 | 稳定性 |
| 直接插入排序 | O(n) | O(n^2) | O(1) | 稳定 |
| 希尔排序 | O(n) | O(n^2) | O(1) | 不稳定 |
| 直接排序 | O(n^2) | O(n^2) | O(1) | 不稳定 |
| 堆排序 | O(nlog(2)n) | O(nlog(2)n) | O(1) | 不稳定 |
| 冒泡排序 | O(n) | O(n^2) | O(1) | 稳定 |
| 快速排序 | O(nlog(2)n) | O(n^2) | O(nlog(2)n) | 不稳定 |
| 归并排序 | O(nlog(2)n) | O(nlog(2)n) | O(n) | 稳定 |
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



