


"Pourquoi me poursuis-tu?"
"Parce que j'ai besoin de boire du sirop de toute urgence."

Maintenant, tu dois faire attention avec ton sirop urgent, car le robot doux que nous allons à présenter aujourd'hui court très vite. Deux fois plus gros qu'un guépard ! Il est encore plus rapide qu'une voiture de F1 et peut courir à une vitesse maximale de 70 longueurs de corps/s. En comparaison, un guépard court à environ 25 longueurs de corps/s et une voiture de F1 roule à 50 longueurs de corps/s (corps). longueurs par seconde). De longues représentations de vitesses relatives peuvent quantifier la vitesse de différents organismes à différentes tailles corporelles).
Ce rythme ressemble un peu à une coquille Saint-Jacques naïve, mais ne clignez pas des yeux, sinon il disparaîtra.
Il s'agit d'un robot souple miniature à commande électromagnétique développé par l'équipe du laboratoire des matériaux souples de l'université Johannes Kepler. Il n'a que la taille d'un timbre-poste. Il court non seulement très vite, mais peut également nager, monter des marches, et surmonter les obstacles et transporter des marchandises.
Cette recherche a été publiée dans la revue Nature Communications sous le titre "Robots électromagnétiques doux ultrarapides à petite échelle".
L'auteur correspondant et premier de l'article est le Dr Guoyong Mao de Chine. Il est diplômé de l'Université du Zhejiang avec un baccalauréat et un doctorat. Il fait actuellement des recherches à l'Université Johannes Kepler.
De nombreux animaux dans la nature peuvent se déplacer rapidement - comme les guépards ou les gazelles. Ces caractéristiques sont utilisées pour aider les animaux à capturer des proies ou à éviter les prédateurs. Depuis de nombreuses années, les scientifiques ont pour objectif de créer des robots souples et flexibles dotés de capacités de vitesse similaires. Cependant, les défauts naturels des matériaux flexibles, tels qu'une réponse lente et une faible résistance, font que la plupart des robots souples se déplacent lentement.
Les robots à base d'élastomère électromagnétique doux (SEMR) répondent généralement rapidement et sont faciles à miniaturiser ; les actionneurs électromagnétiques en élastomère doux peuvent être fabriqués en imprimant des bobines de métal liquide sur des substrats élastiques. En appliquant du courant au métal liquide, ils peuvent contrôler l'actionneur. mouvement.
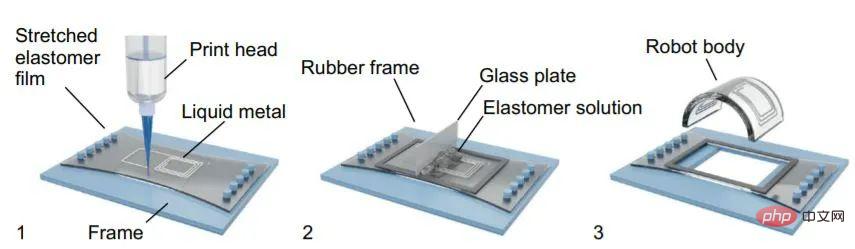
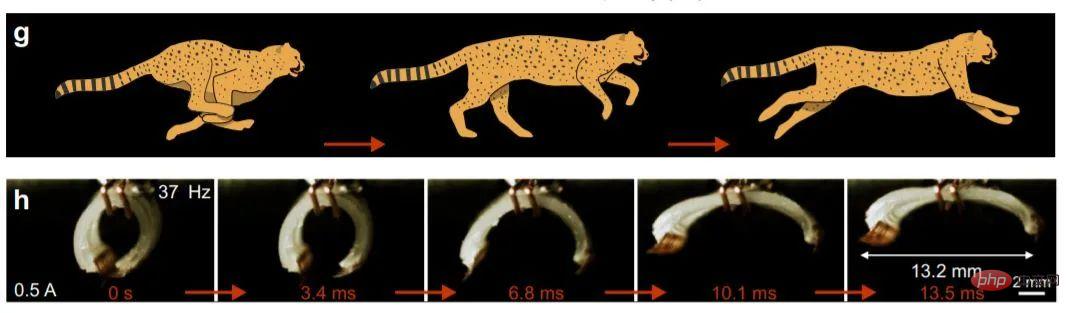
Mais un mouvement de flexion comme celui-ci est loin d'être suffisant. Si vous souhaitez donner au robot un degré élevé de mécanisme de mouvement, une conception plus approfondie est nécessaire. Les chercheurs ont créé l'actionneur bicouche en collant une couche pré-étirée (en haut) sur une couche non déformée (en bas) de sorte que lorsque la bicouche est relâchée, elle s'enroule, profitant de la tension incompatible créée par la bicouche et sa libération. imiter le mouvement d'un guépard qui court.
En plus du corps, la conception des pieds du robot est également très importante. Les pieds en forme de L conçus peuvent fonctionner sur diverses surfaces telles que le papier, le bois, le métal, le plastique et le verre. Cependant, plus la friction entre le matériau du pied et la surface plane est grande, plus le robot courra vite, de la même manière que les griffes d'un guépard peuvent saisir fermement le sol.
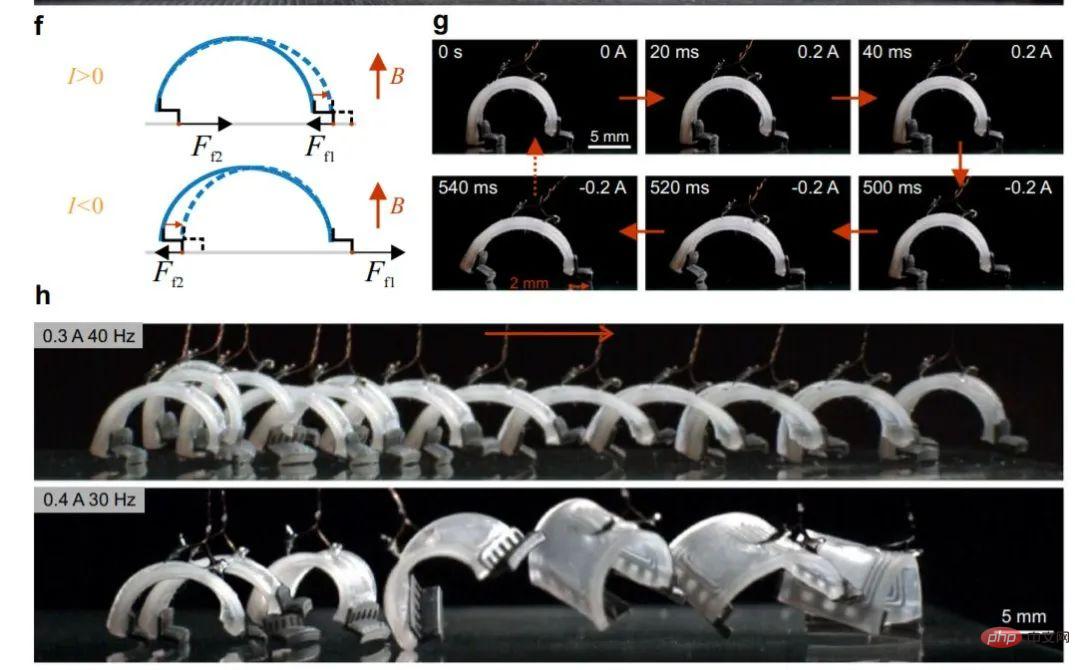
Lorsque le robot se déplie, les pieds avant avancent, tandis que les pieds arrière sont fixés grâce à un verrouillage mécanique ; puis le robot se contracte, les pieds avant sont fixés et les pieds arrière sont tirés vers l'avant. Il atteint des vitesses de fonctionnement ultra-élevées de 70 longueurs de corps/s sur des substrats ondulés 3D (surfaces planes optimales) et une moyenne de 35 longueurs de corps/s sur toute autre surface.
Jusqu'à présent, les petits robots sont pilotés par un système d'alimentation externe connecté. Afin de mieux réaliser la « liberté » du robot, les chercheurs ont lâché la corde et ont placé un « petit sac » d'alimentation sur le dos du robot. une batterie personnalisée alimentée par un circuit imprimé (PCB). Le robot portant un cartable ne se déplace pas aussi vite qu'avant, mais il peut toujours atteindre 2,1 longueur/s de corps et nager à une vitesse de 1,8 longueur/s de corps.
En plus des mouvements à grande vitesse, de nombreux animaux ont des stratégies de survie plus larges, telles que la résilience aux impacts ou aux chutes, la capacité d'éviter les obstacles, la capacité de traverser les frontières terrestres/aquatiques à volonté et avoir la capacité de transporter des proies.
Le robot possède également ces capacités. Les chercheurs ont effectué des tests de durabilité, en l'aplatissant avec des objets lourds pendant la marche et en comprimant le corps principal du robot avec une machine d'essai de traction, et ont constaté qu'il peut résister jusqu'à 139. atm ( 2000 N) contrainte de compression sur le corps.
La résilience seule ne suffit pas, et surmonter les obstacles reste un défi pour la plupart des petits robots. Le robot peut sauter par-dessus les obstacles en appliquant un signal électrique pulsé. Il se contracte d'abord, puis incline son corps (stockant de l'énergie), puis se dilate comme un ressort comprimé (libérant de l'énergie) et saute par-dessus l'obstacle.
En plus de l'environnement terrestre, le petit robot a également appris à nager. Grâce à son poids léger et à sa densité moyenne relativement faible, il peut flotter sur l'eau sans autre modification lorsqu'il utilise le courant à ondes carrées. (0,5 A, 20 Hz), le robot nage à une vitesse maximale de 43 mm/s ou 4,8 longueur de corps/s. S'il est encore amélioré à l'avenir, il pourra atteindre la vitesse du poisson.
Portail papier :
https://www.nature.com/articles/s41467-022-32123-4
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Utilisation de la fonction Matlab GridData
Utilisation de la fonction Matlab GridData
 Quelles sont les méthodes de transfert de fichiers Java ?
Quelles sont les méthodes de transfert de fichiers Java ?
 Quel fichier est au format moyen ?
Quel fichier est au format moyen ?
 Que sont les identifiants Python ?
Que sont les identifiants Python ?
 Comment obtenir du Bitcoin
Comment obtenir du Bitcoin
 Quelles sont les technologies de sécurité des réseaux ?
Quelles sont les technologies de sécurité des réseaux ?
 Comment introduire du CSS externe dans HTML
Comment introduire du CSS externe dans HTML
 Comment fermer la fenêtre ouverte par window.open
Comment fermer la fenêtre ouverte par window.open








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



