


Run with expert-level proficiency in CARLA v2.
Title: Think2Drive: Efficient Reinforcement Learning by Thinking in Latent World Model for Quasi-Realistic Autonomous Driving (in CARLA-v2)
Author's affiliation: Shanghai Jiao Tong University
Reality Autonomous driving (AD) in the world, especially urban driving, involves many corner cases. The recently released AD simulator CARLA v2 adds 39 common events to driving scenarios and provides a test platform that is closer to reality than CARLA v1. This brings new challenges to the community. So far, no literature has reported any success with new scenarios in CARLA v2, because most of the existing works have to rely on specific rules for planning, but they cannot cover CARLA v2. in more complex situations. This work actively and directly trains a planner, hoping to be able to handle corner cases flexibly and effectively, and believes that this is also the future direction of AD. To the best of our knowledge, we develop the first model-based reinforcement learning method, named Think2Drive, for AD, with a world model to learn the transitions of the environment, which then acts as a neural simulator to train the planner. This paradigm greatly improves training efficiency due to the low-dimensional state space and parallel computation of tensors in the world model.
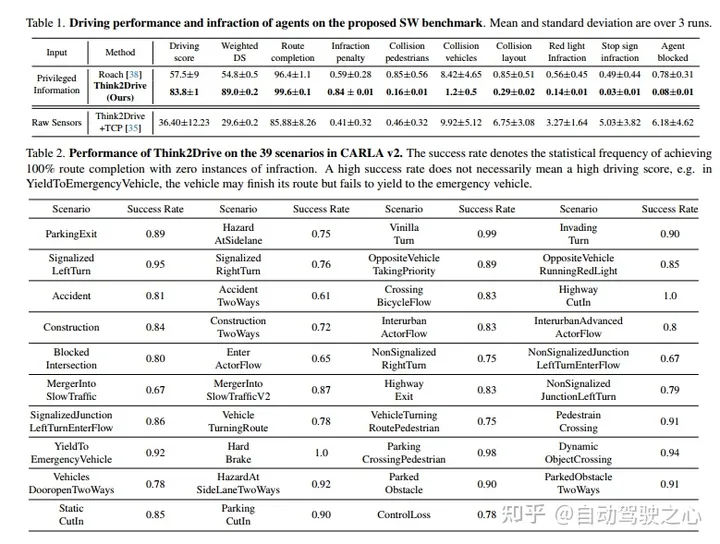
As a result, Think2Drive was able to run at expert level proficiency in CARLA v2 after 3 days of training on a single A6000 GPU. To the best of our knowledge, no success with CARLA v2 has been reported to date (100 % of the route completed). CornerCase-Repository is also proposed, a benchmark that supports the evaluation of driving models through scenarios. Additionally, a new balanced metric is proposed to evaluate performance, including route completion, number of violations, and scene density, so that driving scores can provide more information about actual driving performance.
The above is the detailed content of Think2Drive: The first model-based RL method for autonomous driving (Shanghai Jiaotong University). For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



