


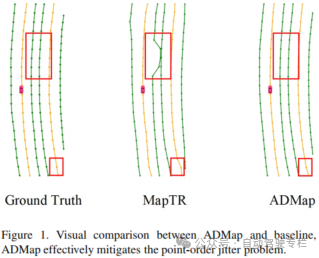
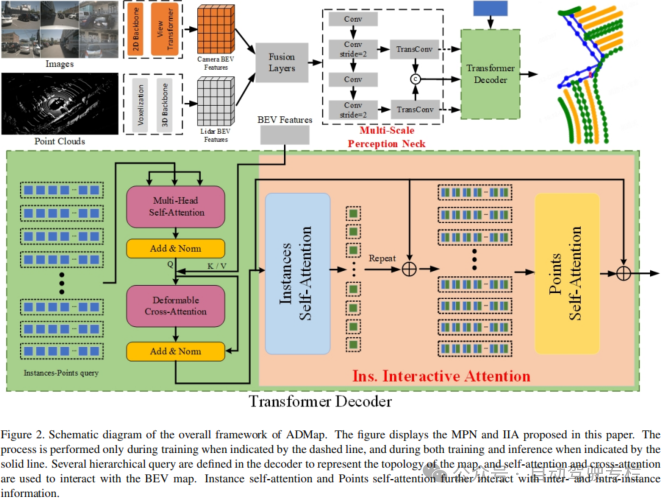
This article introduces ADMap, a method for reconstructing online vectorized high-precision maps anti-interference framework. In the field of autonomous driving, online reconstruction of high-precision maps is crucial for planning tasks. In recent years, a variety of high-performance high-precision map reconstruction models have been developed to meet this demand. However, due to prediction bias, the point sequence within the instance vector may appear jittered or jagged, which will affect subsequent tasks. To this end, this paper proposes an anti-interference map reconstruction framework ADMap. The ADMap framework consists of three modules, namely multi-scale perceptual neck (MPN), instance interactive attention (IIA) and vector direction difference loss (VDDL). By exploring point order relationships between instances and within instances in a cascade manner, this model can more effectively monitor the point order prediction process, thereby alleviating the problem of point order jitter. Experiments demonstrate that ADMap achieves state-of-the-art performance on nuScenes and Argoverse2 datasets. A large number of results show that ADMap can generate stable and reliable map elements in complex and changeable driving scenarios. This is critical to the safety and accuracy of autonomous driving systems. In summary, ADMap is an innovative anti-interference map reconstruction framework that can effectively solve the point order jitter problem and demonstrate excellent performance on actual data sets. This research is of great significance in promoting the development of autonomous driving technology.
The contributions of this article are as follows:
1) This article proposes an end-to-end ADMap, which can reconstruct More stable vectorized high-precision map;
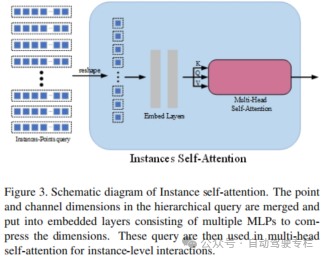
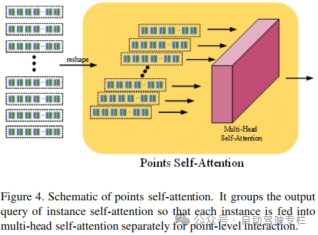
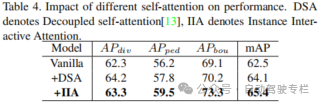
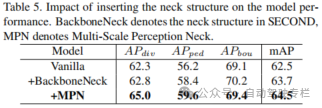
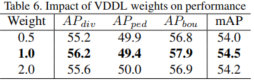
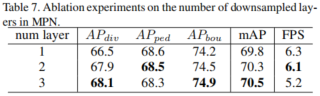
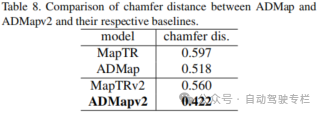
MPN can capture multi-scale information more accurately without increasing computing resources. IIA effectively realizes the interaction of information between instances and within instances, thereby alleviating the problem of instance point position offset. In addition, VDDL utilizes topological information to supervise the reconstruction process of point-order positions and models vector direction differences.
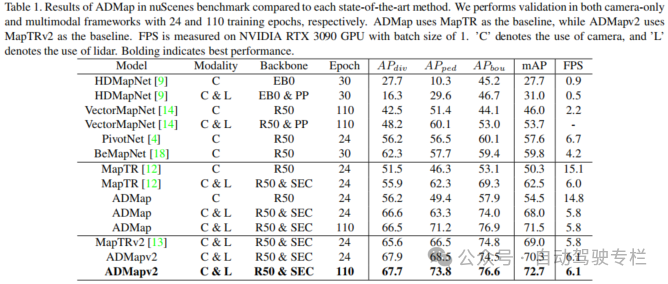
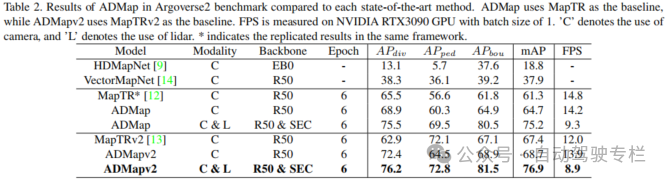
3) ADMap is able to reconstruct vectorized high-precision maps in real time and achieves the best performance in nuScenes and Argoverse2 benchmarks.
Paper pictures and tables


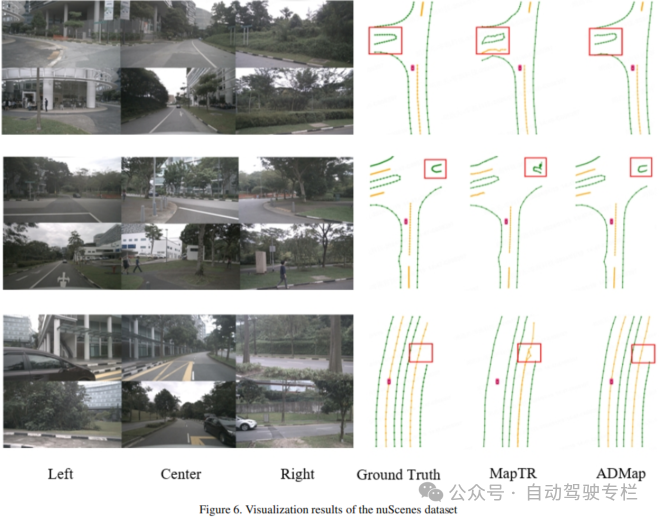
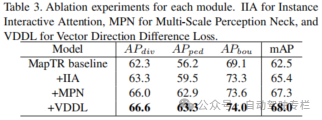
ADMap is an effective and efficient vectorized high-precision map reconstruction framework that uses multiple The three modules of scale-aware Neck, instance interaction attention and vector direction difference loss effectively alleviate the map topology distortion problem caused by instance point jitter. A large number of experiments show that the method proposed in this article can achieve the best performance on the nuScenes and Argoverse2 benchmarks, and its efficiency has also been verified. We believe that ADMap can help the community promote research on vectorized high-precision map reconstruction tasks to better develop fields such as autonomous driving.

Original link: https://mp.weixin.qq.com/s/O0BoiJZwIQmeeChUZkMMng
The above is the detailed content of Anti-interference framework ADMap: a powerful tool for reconstructing online vectorized high-precision maps. For more information, please follow other related articles on the PHP Chinese website!
 How to become a close friend on TikTok
How to become a close friend on TikTok
 How to set up Douyin to prevent everyone from viewing the work
How to set up Douyin to prevent everyone from viewing the work
 Introduction to common commands of postgresql
Introduction to common commands of postgresql
 transactionscope usage
transactionscope usage
 How to check for plagiarism on CNKI Detailed steps for checking for plagiarism on CNKI
How to check for plagiarism on CNKI Detailed steps for checking for plagiarism on CNKI
 What does the metaverse concept mean?
What does the metaverse concept mean?
 ASCII code comparison table
ASCII code comparison table
 How to open python after it is installed
How to open python after it is installed








![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



