


Robots have been widely used in many fields such as takeout, express delivery, airport guidance, and construction engineering inspection. However, one of the difficulties is moving among the crowd
Currently, robots mainly rely on cameras and other sensors to observe the surrounding environment. However, this solution is not stable, and the surrounding crowd will dynamically adjust its direction, so it is difficult for the robot to be applied in crowd scenes.
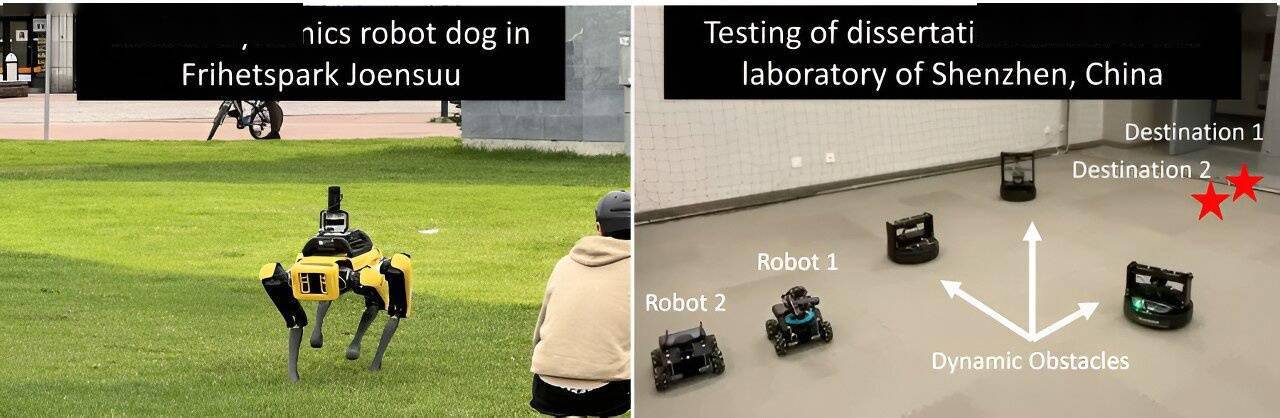
In the latest paper, Chengmin Zhou, MSc, proposes a reinforcement learning algorithm (RL) to guide robots to move in crowds
This is a model-free reinforcement learning algorithm that enables robots to learn from historical experience. After training or learning, the robot can navigate even in challenging situations.
IT Home Note: This method also has many challenges, such as slow learning effect, inability to efficiently analyze sensor information, resulting in the inability to effectively deal with complex crowd scenes, etc.
The above is the detailed content of New algorithm for robots to navigate crowds comes out. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



