


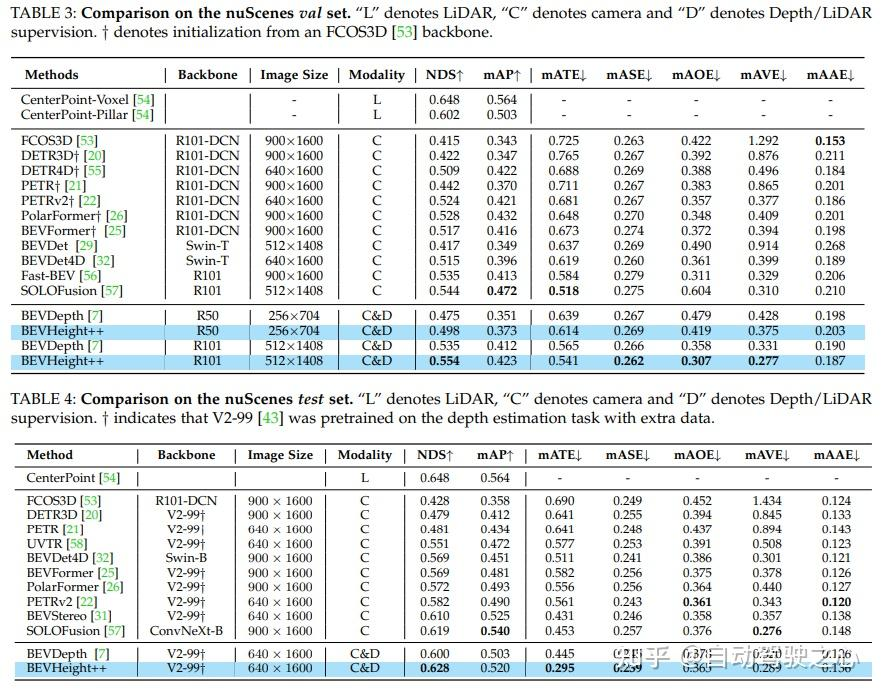
Regress to the height of the ground to achieve a distance-agnostic formulation, thereby simplifying the optimization process for camera-aware only methods. On the 3D detection benchmark of roadside cameras, the method greatly exceeds all previous vision-centric methods. It yields significant improvements over BEVDepth of 1.9% NDS and 1.1% mAP. On the nuScenes test set, the method has made substantial progress, with NDS and mAP increasing by 2.8% and 1.7% respectively.
Title: BEVHeight: Towards robust vision-centered 3D object detection
Paper link: https://arxiv.org/pdf/2309.16179.pdf
Author Unit: Tsinghua University, Sun Yat-sen University, Cainiao Network, Peking University
From the first domestic autonomous driving community: finally completed the construction of 20 technical direction learning routes (BEV sensing/3D detection/multi-sensor fusion /SLAM and planning, etc.)
Although recent autonomous driving systems have focused on developing perception methods for vehicle sensors, people have often overlooked a method that uses smart roadside cameras to extend perception capabilities beyond the visual range. alternative methods. The authors found that state-of-the-art vision-centric BEV detection methods perform poorly on roadside cameras. This is because these methods mainly focus on recovering the depth about the camera center, where the depth difference between the car and the ground shrinks rapidly with distance. In this article, the author proposes a simple yet effective method, called BEVHeight, to solve this problem. Essentially, the authors regress to the height of the ground to achieve a distance-agnostic formulation, thereby simplifying the optimization process for camera-aware-only methods. By combining height and depth encoding techniques, a more accurate and robust projection from 2D to BEV space is achieved. The method significantly outperforms all previous vision-centric methods on the popular 3D detection benchmark of roadside cameras. For self-vehicle scenes, BEVHeight outperforms depth-only methods
Specifically, it yields 1.9% better NDS and 1.1% better mAP than BEVDepth when evaluated on the nuScenes validation set. To improve. In addition, on the nuScenes test set, the method achieved substantial progress, with NDS and mAP increasing by 2.8% and 1.7% respectively.
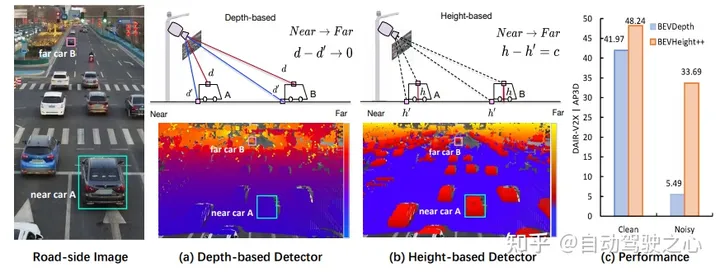
Figure 1: (a) To generate 3D bounding boxes from monocular images, state-of-the-art methods first explicitly or implicitly predict per-pixel depth to determine The 3D position of the foreground object versus the background. However, when we plotted the per-pixel depth on the image, we noticed that the difference between points on the roof and the surrounding ground quickly shrinks as the car moves away from the camera, making the optimization sub-optimal, especially for Distant objects. (b) Instead, we plot the per-pixel height to the ground and observe that this difference is agnostic regardless of distance and is visually more suitable for the network to detect objects. However, 3D position cannot be directly regressed by predicting height alone. (c) To this end, we propose a new framework BEVHeight to solve this problem. Empirical results show that our method outperforms the best method by 5.49% on clean settings and 28.2% on noisy settings.
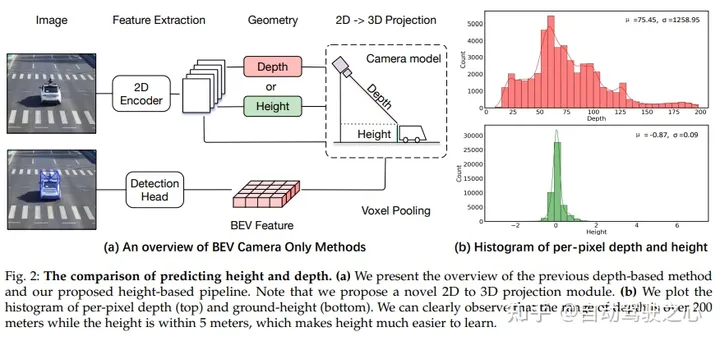
Comparison of prediction height and depth. (a) Overview of previous depth-based methods and our proposed height-based pipeline. Please note that this paper proposes a novel 2D to 3D projection module. (b) Plotting histograms of per-pixel depth (top) and ground height (bottom), it can be clearly observed that the depth range is over 200 meters, while the height is within 5 meters, which makes the height easier to learn.
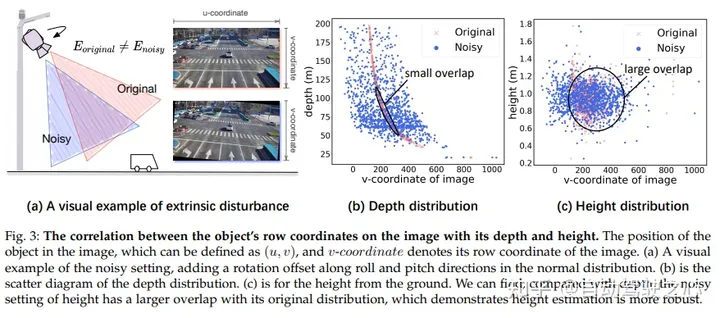
In an image, there is a correlation between the row coordinates of an object and its depth and height. The position of the target in the image can be defined by (u, v), where v represents the row coordinate of the image. In (a) we show a visual example of introducing noise by adding rotational offsets in the roll and pitch directions to a normal distribution. In (b) we show a scatterplot of the depth distribution. In (c) we show the height above the ground. We can observe that the noise setting for height has a greater overlap with its original distribution compared to depth, indicating that height estimation is more robust
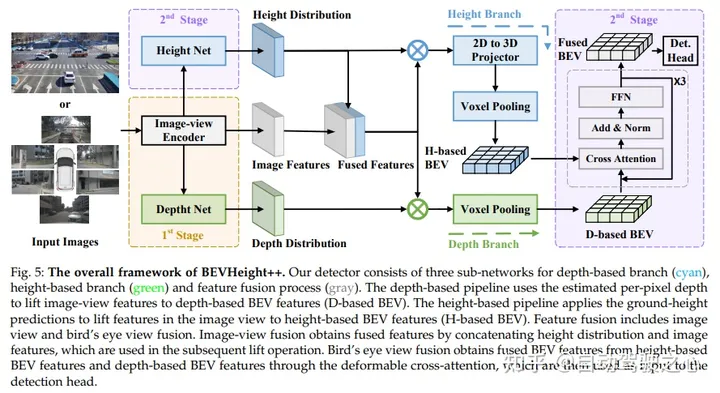
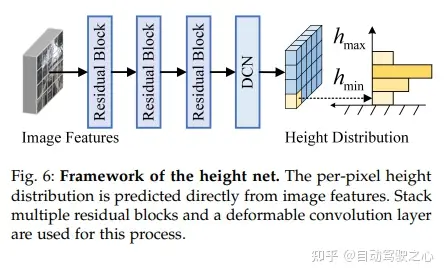
The overall framework of BEVHeight contains three sub-networks, namely the depth-based branch (cyan), the height-based branch (green) and the feature fusion process (grey). The depth-based pipeline converts image view features into depth-based BEV features (D-based BEV) using the estimated per-pixel depth. The height-based pipeline generates height-based BEV features (H-based BEV) using ground height predictions of lift features in image views. Feature fusion includes image fusion and bird's-eye view fusion. Image-view fusion obtains fusion features by cascading height distribution and image features, which are used for subsequent upgrading operations. Bird's-eye view fusion obtains fused BEV features from height-based BEV features and depth-based BEV features through deformable cross-attention, and then uses it as the input of the detection head

The above is the detailed content of Far ahead! BEVHeight++: A new solution for roadside visual 3D target detection!. For more information, please follow other related articles on the PHP Chinese website!





























![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



