


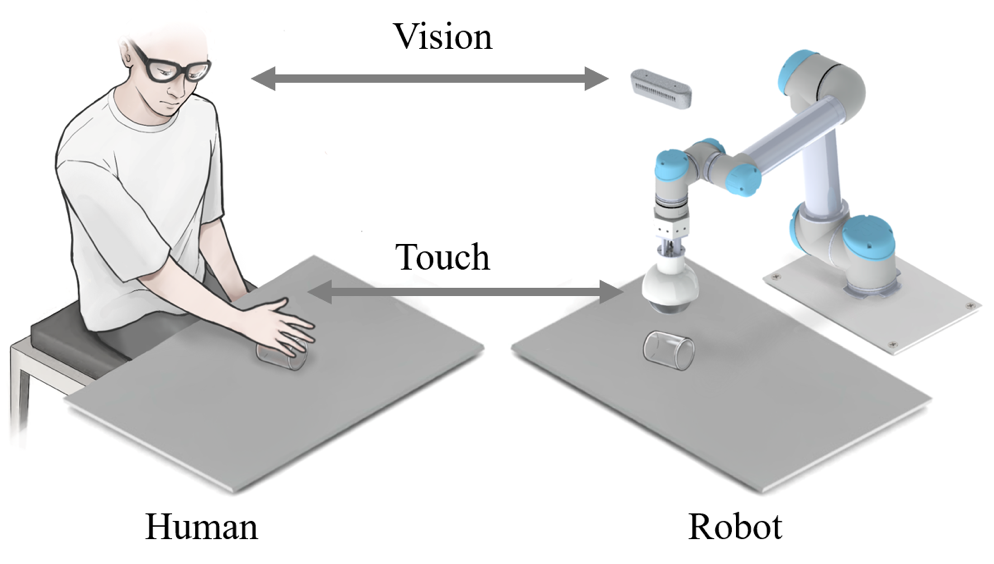
The perception and grasping of transparent objects in complex environments is a recognized problem in the field of robotics and computer vision. Recently, a team and collaborators from Tsinghua University Shenzhen International Graduate School proposed a visual-tactile fusion transparent object grasping framework, which is based on an RGB camera and a mechanical claw TaTa with tactile sensing capabilities, and uses sim2real To realize the grasping position detection of transparent objects. This framework can not only solve the problem of grasping irregular transparent objects such as glass fragments, but also solve the problems of grasping overlapping, stacked, uneven, sand piles and even highly dynamic underwater transparent objects.
 Picture
Picture
Transparent objects are widely used in life due to their beauty, simplicity and other characteristics. For example, they can be found in kitchens, shops, and factories. Although transparent objects are common, grasping transparent objects is a very difficult problem for robots. There are three main reasons:
 Picture
Picture
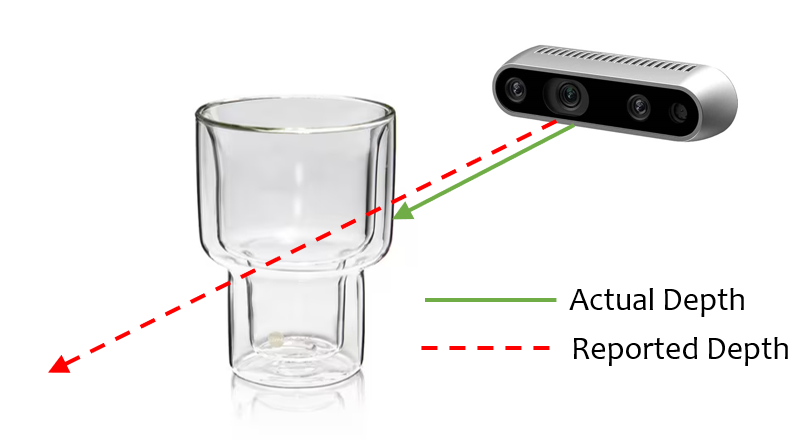
1. It does not have its own texture attributes. The information on the surface of transparent objects changes with the change of the environment, and the texture produced is mostly caused by light refraction and reflection, which brings great difficulties to the detection of transparent objects.
2. The annotation of transparent data sets is more difficult than the annotation of ordinary objects. In actual scenes, it is sometimes difficult for humans to distinguish transparent objects such as glass, let alone label images of transparent objects.
3. The surface of a transparent object is smooth, and even a small deviation in the grabbing position may lead to the failure of the grabbing task.
Therefore, how to solve the problem of grasping transparent objects in various complex scenes with as little cost as possible has become a very important issue in the field of transparent object research. Recently, the intelligent perception and robotics team from Tsinghua University Shenzhen International Graduate School proposed a transparent object grabbing framework based on visual and touch fusion. To realize the detection and grabbing of transparent objects. This method not only has a very high grabbing success rate, but can also be adapted to grabbing transparent objects in various complex scenes.
 Picture
Picture
Please view the following paper link: https://ieeexplore.ieee.org/document/10175024
The corresponding author of the paper, Associate Professor Ding Wenbo of Shenzhen International Graduate School of Tsinghua University, said: "Robots have shown great application value in the field of home services, but most of the current robots focus on a single field and are general-purpose. The proposed robot grasping model will bring great impetus to the promotion and application of robot technology. Although we use transparent objects as the research object, this framework can be easily extended to the grasping tasks of common objects in life. "
The corresponding author of the paper and researcher Liu Houde from the Shenzhen International Graduate School of Tsinghua University said: "The unstructured environment in the home scene has brought great challenges to the practical application of robots. , we integrate vision and touch for perception, further simulating the perception process when humans interact with the outside world, and providing various guarantees for the stability of robot applications in complex scenarios. In addition to integrating vision and touch, the framework we propose It can also be extended to more modalities such as hearing."
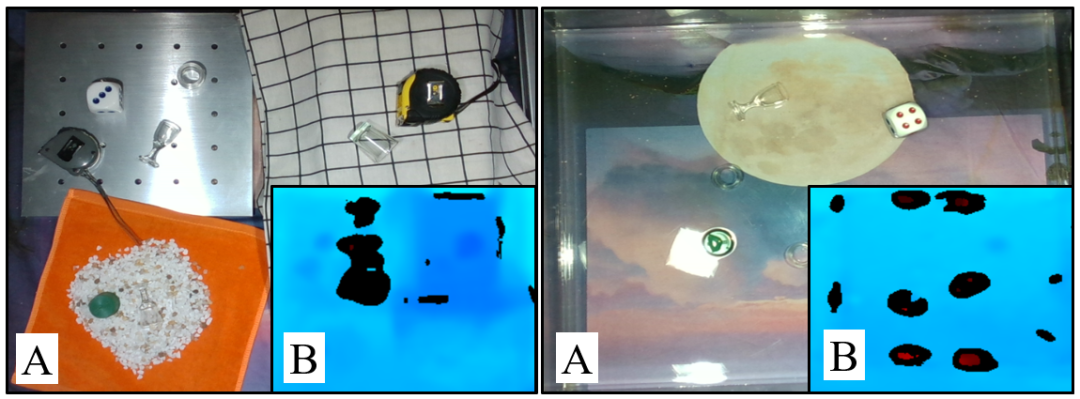
Grasping transparent objects is a challenge For this task, in addition to detecting the position of the object during the grabbing process, the grabbing position and angle should also be considered. Currently, most work on grasping transparent objects is performed on a plane with a simple background, but in real life, most scenes will not be as ideal as our experimental environment. Some special scenes, such as glass fragments, piles, overlaps, undulations, sand and underwater scenes, are more challenging.
 Picture
Picture
 Picture
Picture
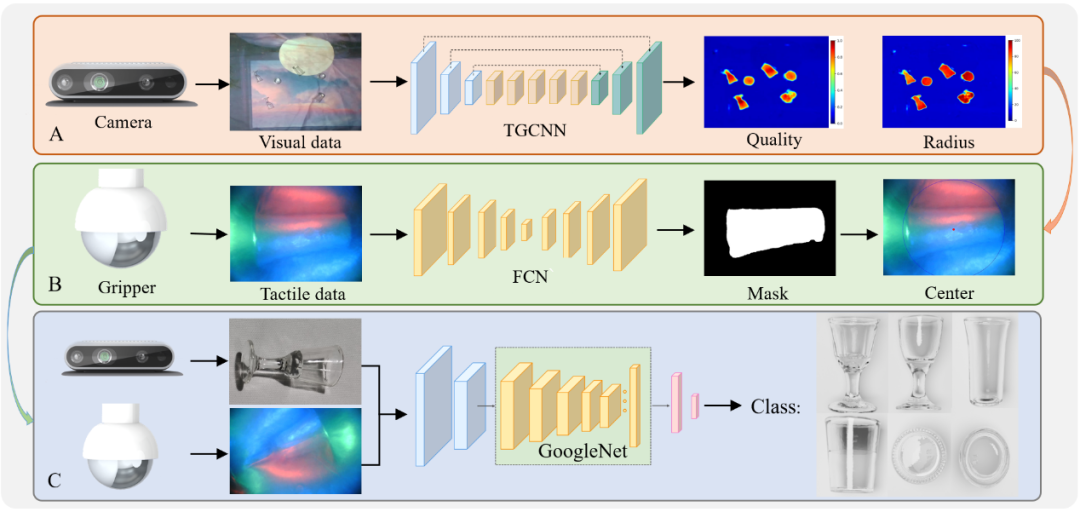
The design of the grasping algorithm is shown in the figure. In order to realize the grasping of transparent objects, we respectively proposed a transparent object grasping position detection algorithm, a tactile information extraction algorithm and a visual-tactile fusion classification. algorithm. In order to reduce the cost of labeling the dataset, we used Blender to create a multi-background transparent object grabbing synthetic dataset SimTrans12K, which contains 12,000 synthetic images and 160 real images. In addition to the dataset, we also propose a Gaussian-Mask annotation method for the unique optical properties of transparent objects. Since we use the Jamming gripper as the executor, we propose a specialized grasping network TGCNN for it, which can achieve good detection results after training on the synthetic data set.
Grasping framework
We have integrated the above algorithms to complete the capturing of transparent objects in different scenarios. Fetching, which constitutes the upper-level grabbing strategy of our visual-touch fusion framework. We decompose a grasping task into three subtasks, namely object classification, grasping position detection and grasping height detection. Each subtask can be accomplished by vision, touch, or a combination of vision and touch.
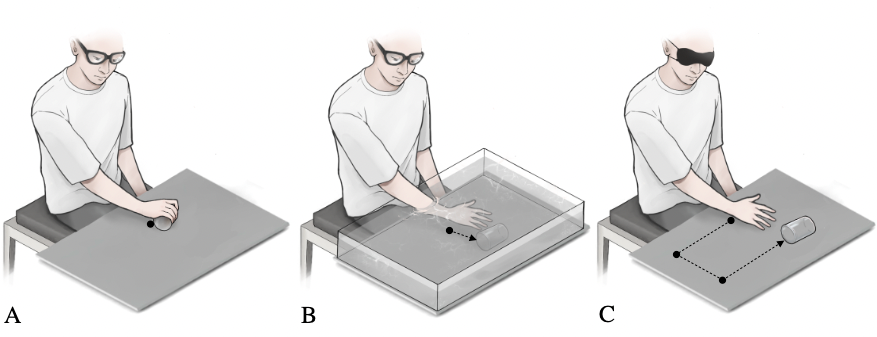
Similar to human grasping behavior, when vision can directly obtain the precise position of an object, we can control the hand to directly reach the object and complete the grasp, as shown in the figure below (A) Show. When vision cannot accurately obtain the position information of an object, after using vision to estimate the position of the object, we will use the tactile sensing function of the hand to slowly adjust the grasping position until the object is contacted and the appropriate grasping position is reached, as shown below (B) is shown. For object grasping under limited vision conditions, as shown in the figure below (C), we will use the rich tactile nerves of the hand to search within the possible range of the target until contact with the object is made. Although this is very inefficient, But it is an effective method to solve object grabbing in these special scenarios.
 Picture
Picture
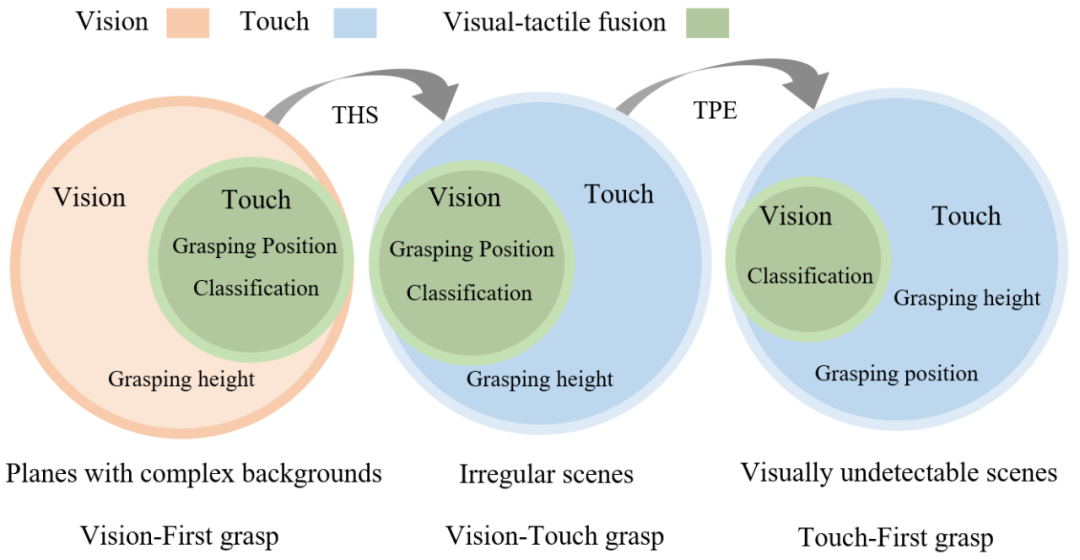
Inspired by human grasping strategies, we divide transparent object grasping tasks into three types: Flat surfaces with complex backgrounds, irregular scenes, and visually undetectable scenes, as shown in the figure below. In the first type, vision plays a key role, and we define the grasping method in this scenario as a vision-first grasping method. In the second type, vision and touch can work together, and we define the grasping method in this scenario as visual-tactile grasping. In the last type, vision may fail and touch becomes dominant in the task. We define the grasping method in this scenario as a touch-first grasping method.
 Picture
Picture
The flow of the vision-first grabbing method is shown in the figure below. First, TGCNN is used to obtain the grabbing position and height. Then the tactile information is used to capture the position calibration, and finally the visual-tactile fusion algorithm is used for classification. The visual-tactile grasping is based on the previous one and adds the THS module, which can use the touch to obtain the height of the object. The haptic-first grasping approach has been joined by a TPE module that uses the sense of touch to obtain the position of transparent objects.
In order to verify the effectiveness of our proposed framework and algorithm, we conducted a large number of verification experiments.
First, in order to test the effectiveness of our proposed transparent object dataset, annotation method and grasping position detection network, we conducted synthetic data detection experiments and under different backgrounds and brightness Transparent object grasping position detection experiment. Secondly, in order to verify the effectiveness of the visual-tactile fusion grasping framework, we designed a transparent object classification grasping experiment and a transparent fragment grasping experiment. Third, we designed a transparent object grasping experiment in irregular and visually restricted scenes to test the effectiveness of the framework after adding the THS module and TPE module.
To address the challenging problem of detecting, grasping, and classifying transparent objects, this study proposes a synthetic dataset-based A framework for visual-haptic fusion. First, the Blender simulation engine is used to render synthetic datasets instead of manually annotated datasets.
In addition, Gaussian-Mask is used instead of the traditional binary annotation method to make the generation of grab positions more accurate. In order to detect the grasping position of transparent objects, the author proposed an algorithm called TGCNN and conducted multiple comparative experiments. The results show that even if only synthetic data sets are used for training, the algorithm can perform well on different backgrounds. and lighting conditions to achieve good detection.
Considering the difficulty in grasping caused by the limitations of visual detection, this study proposes a tactile calibration method combined with the soft gripper TaTa, by adjusting the grasp with tactile information location to improve the crawling success rate. Compared with pure visual grasping, this method improves the grasping success rate by 36.7%.
In order to solve the problem of classifying transparent objects in complex scenes, this study proposes a transparent object classification method based on vision-tactile fusion, which is compared with a classification based on vision alone. , the accuracy increased by 39.1%.
In addition, in order to achieve transparent object grabbing in irregular and visually undetectable scenes, this study proposes THS and TPE modules, which can compensate for the lack of visual information. The transparent object grabbing problem below. The researchers systematically designed a large number of experiments to verify the effectiveness of the proposed framework in complex scenes such as various superpositions, overlaps, undulations, sandy areas, and underwater scenes. The study believes that the proposed framework can also be applied to object detection in low-visibility environments, such as smoke and turbid water, where tactile perception can make up for the lack of visual detection and improve classification accuracy through visual-tactile fusion.

The instructor of the visual-touch fusion transparent object grasping project is Ding Wenbo. Currently, he is an associate professor at Shenzhen International Graduate School of Tsinghua University, where he leads the intelligent perception and robotics research group. His research interests mainly include signal processing, machine learning, wearable devices, flexible human-computer interaction and machine perception. He previously graduated with a bachelor's degree and a doctoral degree from the Department of Electronic Engineering of Tsinghua University, and served as a postdoctoral fellow at the Georgia Institute of Technology, where he studied under Academician Wang Zhonglin. He has won many awards such as the Tsinghua University Special Prize, the Gold Medal of the 47th International Exhibition of Inventions of Geneva, the IEEE Scott Helt Memorial Award, the Second Prize of the Natural Science Award of the China Electronics Society, etc., and has worked in Nature Communications, Science Advances, Energy and Environmental Science, Advanced Energy He has published more than 70 papers in authoritative journals in the fields of Materials, IEEE TRO/RAL and other fields, has been cited more than 6,000 times by Google Scholar, and has authorized more than 10 patents in China and the United States. He serves as the associate editor of the authoritative international signal processing journal Digital Signal Processing, the chief guest editor of the IEEE JSTSP Special Issue on Robot Perception, and the Applied Signal Processing Systems Technical Committee Member of the IEEE Signal Processing Society.
Homepage of the research group: http://ssr-group.net/.

From left to right: Shoujie Li,Haixin Yu,Houde Liu
The co-authors of the paper are Shoujie Li (Ph.D. student at Tsinghua University) and Haixin Yu (Master student at Tsinghua University). The corresponding authors are Wenbo Ding and Houde Liu. Other authors include Linqi Ye (Shanghai University ), Chongkun Xia (Tsinghua University), Xueqian Wang (Tsinghua University), Xiao-Ping Zhang (Tsinghua University). Among them, Shoujie Li's main research directions are robot grasping, tactile perception and deep learning. As the first author, he has published many papers in authoritative robotics and control journals and conferences such as Soft Robotics, TRO, RAL, ICRA, IROS, etc., and has authorized 10 invention patents. The remaining projects have won 10 provincial and ministerial competition awards. The relevant research results were selected as the first author in the "ICRA 2022 Outstanding Mechanisms and Design Paper Finalists". He has won honors such as Tsinghua University Future Scholar Scholarship and National Scholarship.
The above is the detailed content of It can grab glass fragments and underwater transparent objects. Tsinghua has proposed a universal transparent object grabbing framework with a very high success rate.. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



