


On May 31st, NJ Technology launched the all-terrain magnetic adsorption wall-climbing robot. This robot is the first innovative product to be publicly unveiled in China that can solve the high-altitude operations of wall-climbing robots, overcome obstacles, and realize internal and external corner crossings. It is expected to solve the rigid needs of high-altitude wall-climbing operations in heavy industries such as shipbuilding and chemical industry, and open up a new situation for high-altitude automated operations in my country.
Ruji Technology is a scientific and technological achievements transformation project company of Shanghai Jiao Tong University. It cooperates closely with companies such as Kaixiang Dynamics, Jun Microdynamics, and Saweide under Green Harmonic, and strives to become the global leader in wall mobile robots. .
The parameters of the wall-climbing robot released by Enji this time are very superior, with a load/weight ratio of up to 2:1. This wall-climbing robot can easily carry a collaborative robot for high-altitude operations and complete complex tasks such as high-altitude welding and grinding. Wall-climbing operations, this technology has successfully filled the gap in the domestic high-altitude operation market in complex environments, and the core technology has reached the international level.

Figure 1. Robot from elevation to inversion
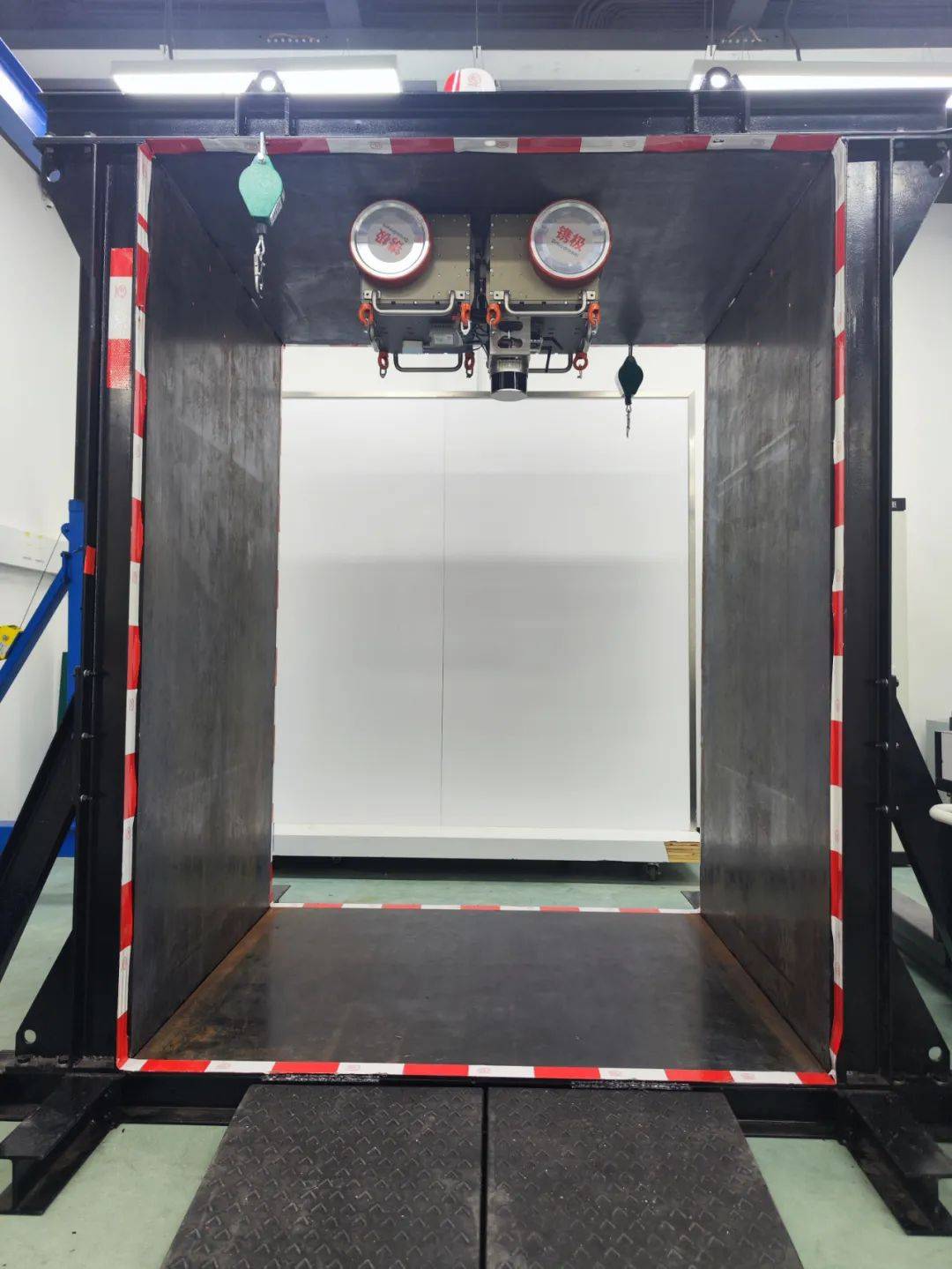
Figure 2. The robot moves on the inverted surface
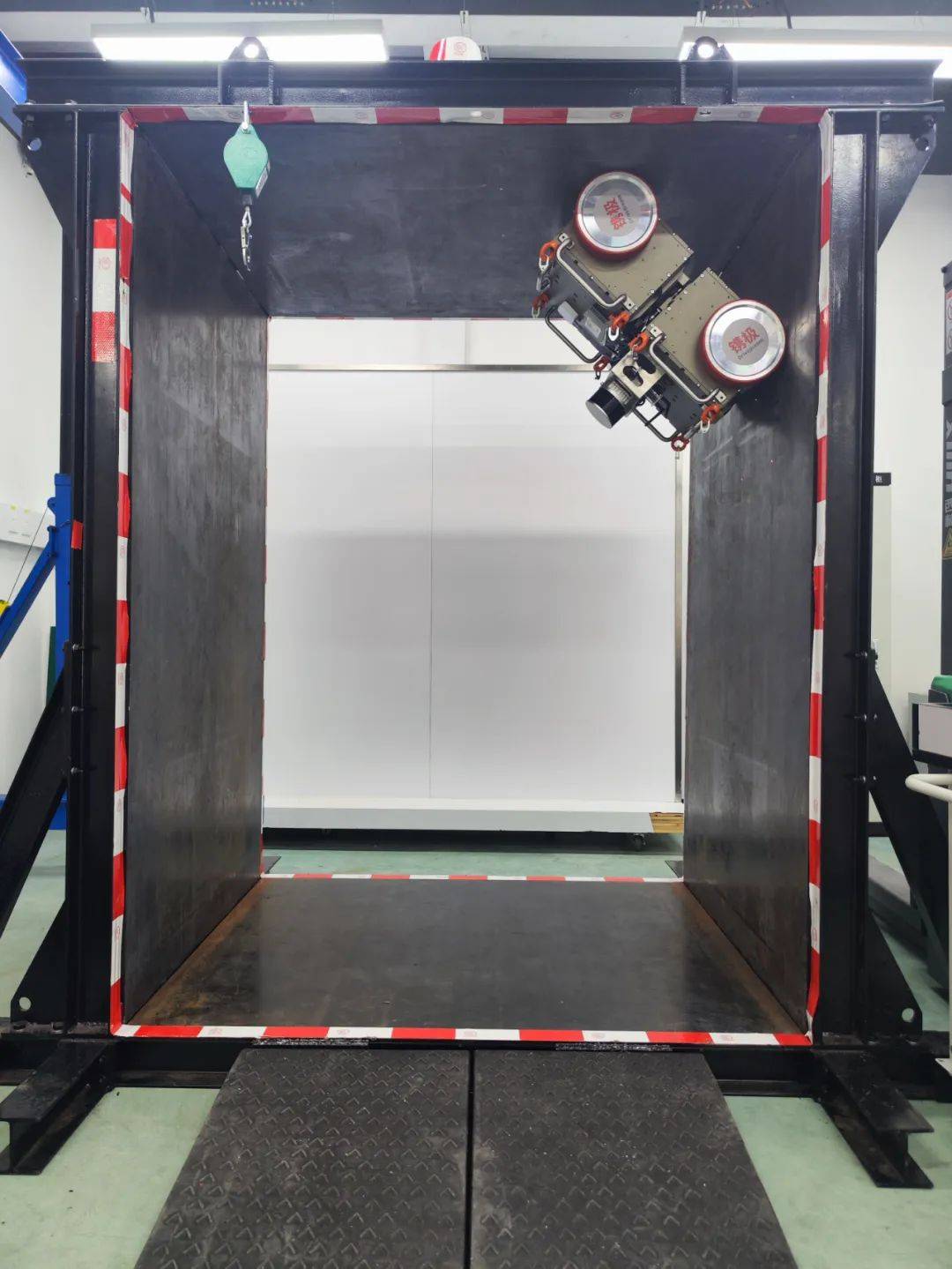
Figure 3. The robot moves from inverted to vertical
Behind this product is the complex wall all-terrain adaptation technology pioneered by Enji Robot Product Innovation. The robot body is designed based on independently developed large magnetic gap permanent magnet adsorption technology and arrayed large load magnetic adsorption technology, combined with magnetic attraction. The innovative method of sensing adjustment and early warning is based on the complementary advantages of the wall-climbing platform in the four-wheel frame and the five-wheel deformable wall-climbing mechanism. It breaks through the movement limits of the wheeled wall-climbing mobile robot in terms of performance, and completes internal and external angle bending and obstacle surmounting for the first time. Full coverage of functions enables the robot to achieve high mobility, high adaptability, high passing ability, and high load capacity for high-altitude operations, and solves the problem of complex three-dimensional wall climbing operations for the first time in the world.
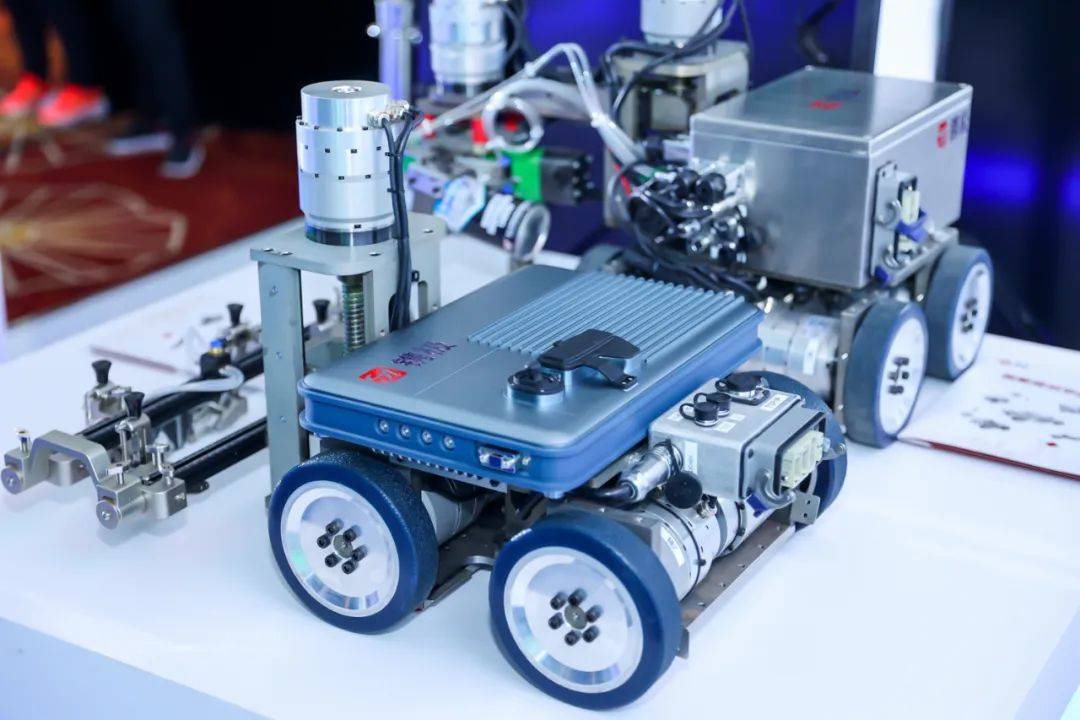
Figure 4. Four-wheeled and six-axis mobile grinding and wall-climbing robot


Figure 5. The five-wheeled all-terrain wall-climbing robot is climbing over the outer corner
Taking some scenarios in high-end industries such as shipbuilding and petrochemicals as an example, the wall-climbing robot system can carry robots and terminal operating equipment in the air to provide automated operations, and provide comprehensive software, hardware, algorithms and services based on customer needs. Solution to complete multiple process integration operations in high-altitude scenes. Our aerial robot products are significantly differentiated from other products on the market in terms of functionality, performance and service.
In practical applications, the EJI wall-climbing robot can use a variety of sensor information to build complex environment maps in real time, locate locations, plan paths and make decisions independently. At the same time, because the cylindrical wall-climbing robot also has environmental perception and obstacle avoidance, and a compensation force feedback mechanism to give it strong obstacle surmounting capabilities, when the robot encounters complex terrain, it can independently adjust the wheel surface to increase environmental adaptability, and with the help of force-magnetic coupling design and control algorithm implementation, so that the entire machine maintains optimal energy consumption under the condition of extremely high comprehensive load capacity. This makes the wall-climbing robot adaptable to different complex curved surfaces and can better perform complex wall operations. It also means that the robot can easily enter new fields such as welding, painting, grinding, and inspection in tanks, ships and other industries, providing A new solution with high performance, high precision and high intelligence.
In the future, Enji wall-climbing robots will mainly provide robot applications and solutions for major industrial fields, especially in dangerous operating environments such as high altitudes and closed environments. They can help enterprises realize the automation of high-altitude operations and improve operational safety through robot systems. , efficiency and quality. It is expected to be used in shipbuilding, petrochemical, hydropower, thermal power, wind power, nuclear power and other industries for internal ship maintenance, storage tank surface inspection, large steel structures, water-cooled walls, wind towers and other high-altitude operations.
It is understood that this wall-climbing robot was mainly developed through "industry-university-research-application" cooperation with Green Harmonic and Shanghai Jiao Tong University. During the research and development process, it focused on precision reducers, motors, servo systems, Some bottlenecks in EHA and other fields have led to a gradual increase in the localization rate of products. The Enji wall-climbing robot now uses all domestic self-developed components as key core components, which ensures that the procurement cost and the quality of key components are completely under its control.
Figure 6. Small four-wheel wall climbing inspection robot
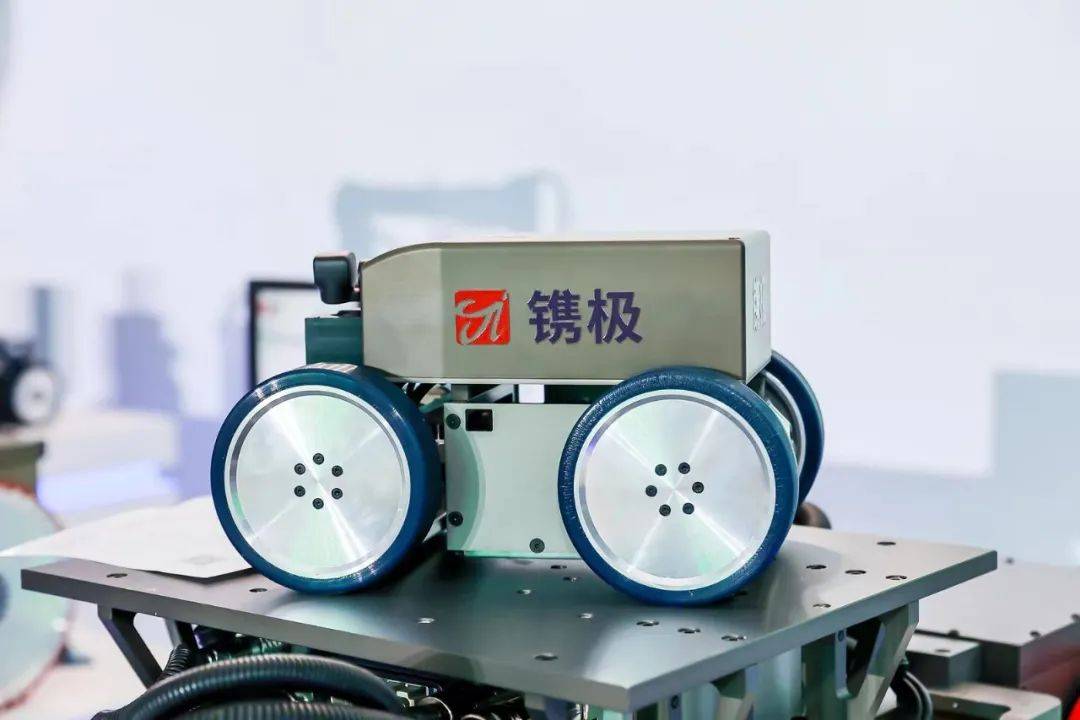
Figure 7. Phased array four-wheel wall climbing inspection robot
Professor Zhao Yanzheng, deputy director of the Robotics Institute of Shanghai Jiao Tong University and co-founder of Ruji Technology, said that in the future, Ruji will continue to increase investment in research and development, follow the industry technology development trend, continue to innovate products and solutions, and enhance the autonomous navigation of robots. capacity, load stability, remote control operation and other aspects of performance, constantly improving the intelligence and comprehensive performance of products, and eventually moving towards the global high-end market.
Robots can replace about 50-70% of the jobs in the global aerial work market, which exceeds US$20 billion. This permanent magnet adsorption wall-climbing robot can fully meet the needs of this field, with a market potential of billions of dollars. It is reported that Ningji has already obtained certain market orders and is expected to occupy the still blank domestic market in the future and compete with international companies.
The above is the detailed content of Domestic robots challenge their limits in high-altitude fields and strive to become the king of wall-climbing operations. For more information, please follow other related articles on the PHP Chinese website!





























![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



