


Input the three-dimensional shapes of a rocking chair and a horse. What can you get?


##Wooden cart plus horse? Get a carriage and an electric horse; a banana and a sailboat? Get a banana sailboat; eggs plus deck chairs? Get the egg chair.
Researchers from UCSD, Shanghai Jiao Tong University, and Qualcomm teams have proposed the latest three-dimensional representation model OpenShape, making it possible to understand the open world of three-dimensional shapes.
By learning a native encoder of 3D point clouds on multi-modal data (point cloud - text - image), OpenShape builds a representation space of 3D shapes and aligns it with CLIP's text and image spaces. Thanks to large-scale and diverse 3D pre-training, OpenShape achieves open-world understanding of 3D shapes for the first time, supporting zero-shot 3D shape classification, multi-modal 3D shape retrieval (text/image/point cloud input), and subtitles of 3D point clouds. Cross-modal tasks such as image generation and 3D point cloud-based image generation.
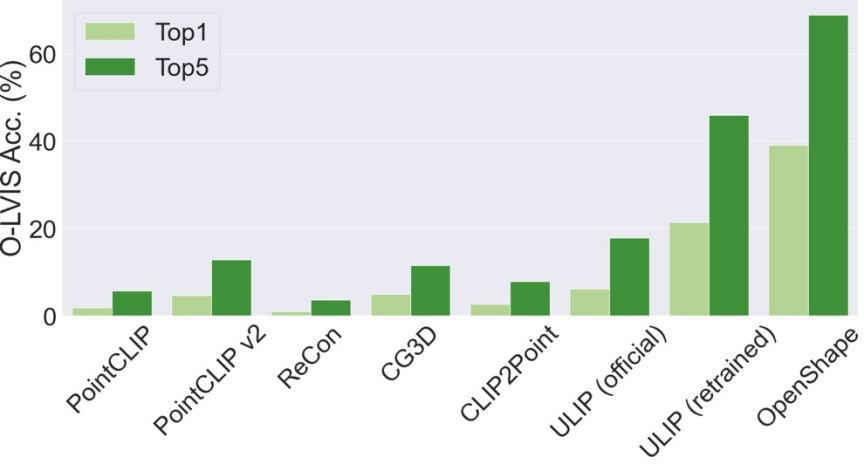
Three-dimensional shape zero-shot classification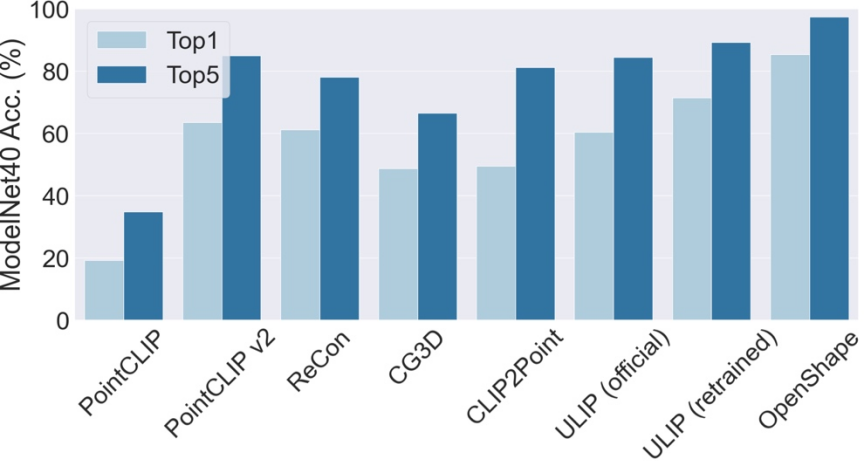
OpenShape’s top3 and top5 accuracy on ModelNet40 reached 96.5% and 98.0% respectively.
Multimodal 3D shape retrieval
With OpenShape’s multimodal representation, users can perform 3D shape retrieval on image, text, or point cloud input. Study the retrieval of 3D shapes from integrated datasets by computing the cosine similarity between the input representation and the 3D shape representation and finding kNN.

The above figure shows the input image and two retrieved 3D shapes. Three-dimensional shape retrieval of text input The above image shows the input text and the retrieved three-dimensional shape. OpenShape learns a wide range of visual and semantic concepts, enabling fine-grained subcategory (first two lines) and attribute control (last two lines, such as color, shape, style, and their combinations). 3D shape retrieval of 3D point cloud input The above figure shows the input 3D point cloud and two retrieved 3D shapes. 


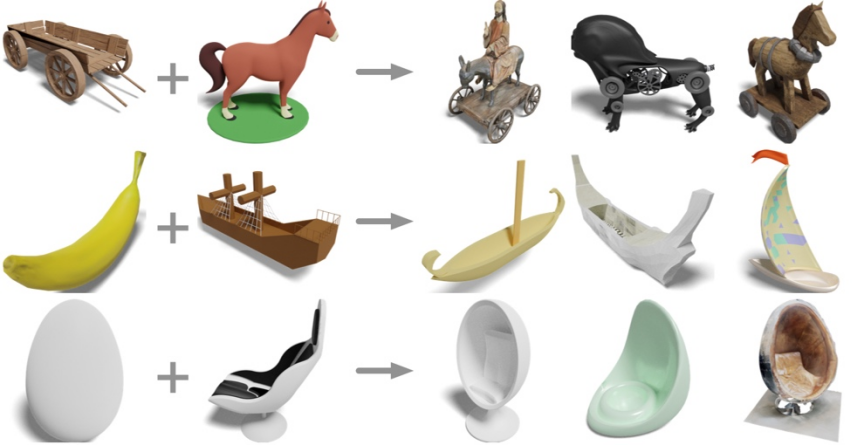
#Double input three-dimensional shape retrieval
The above figure takes two 3D shapes as input and uses their OpenShape representations to retrieve the 3D shape that is closest to both inputs at the same time. The retrieved shape cleverly combines semantic and geometric elements from both input shapes.
Three-dimensional shape-based text and image generationBecause OpenShape's three-dimensional shape representation is aligned with CLIP's image and text representation space, they can be used with many based on Derived models from CLIP are combined to support a variety of cross-modal applications.
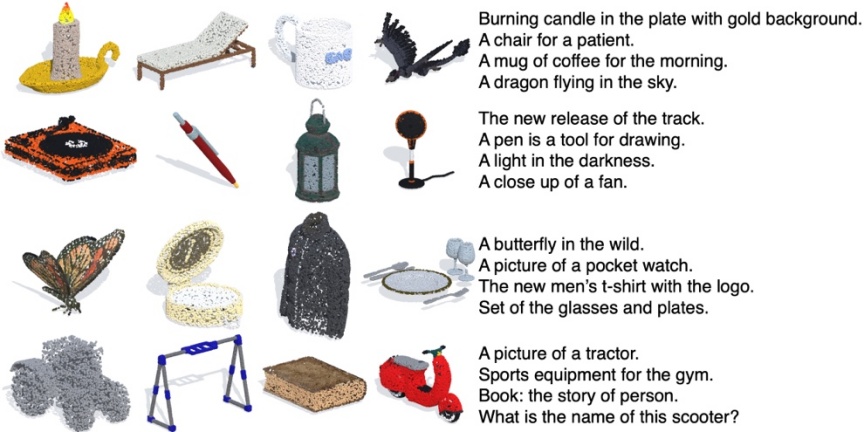
Subtitle generation of three-dimensional point cloud
By combining with the ready-made image subtitle model (ClipCap), OpenShape implements subtitle generation for 3D point clouds.
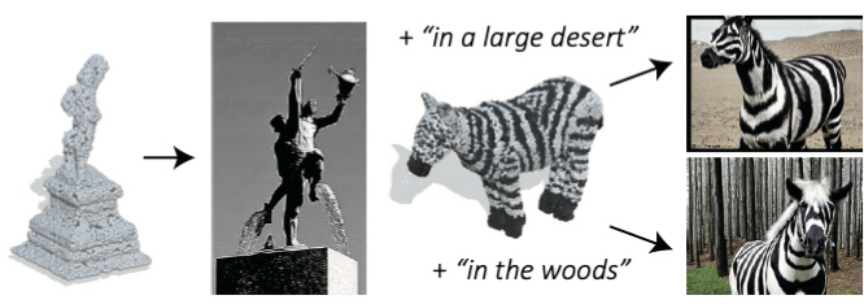
Image generation based on three-dimensional point cloud
By combining with the ready-made text-to-image diffusion model (Stable unCLIP), OpenShape implements image generation based on 3D point clouds (supporting optional text hints).
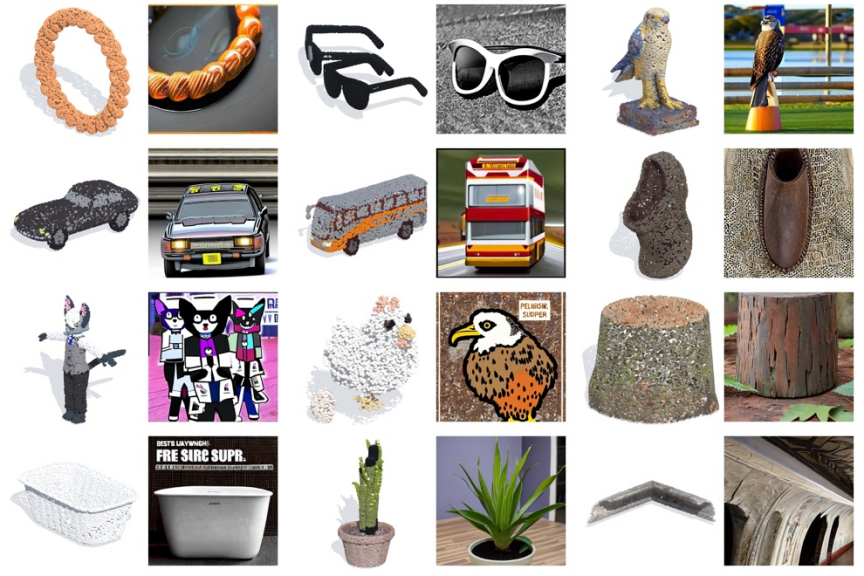
##More examples of image generation based on three-dimensional point clouds Training details
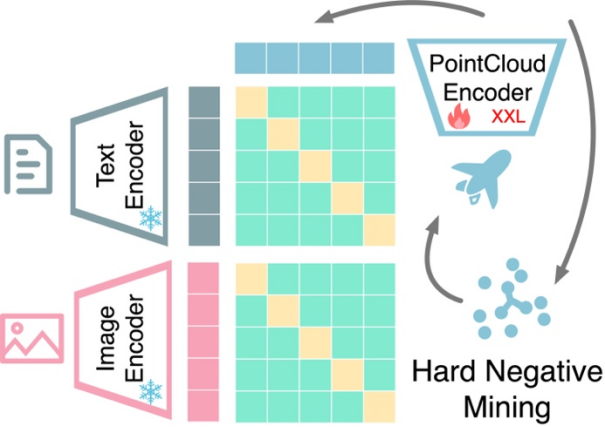
Multimodal representation alignment based on contrastive learning: OpenShape trains a 3D native encoder that will The 3D point cloud is used as input to extract the representation of the 3D shape. Following previous work, we exploit multimodal contrastive learning to align with CLIP's image and text representation spaces. Unlike previous work, OpenShape aims to learn a more general and scalable joint representation space. The focus of the research is mainly to expand the scale of 3D representation learning and address the corresponding challenges, so as to truly realize 3D shape understanding in the open world.
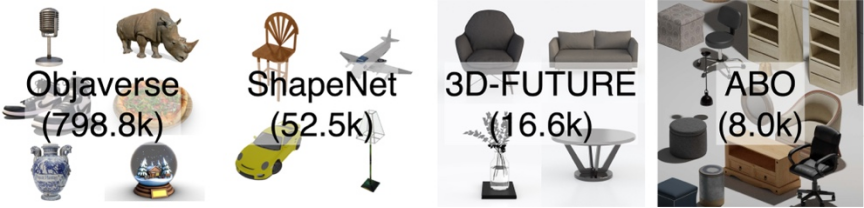
Integrating multiple 3D shape datasets: Since the scale and diversity of training data play a crucial role in learning large-scale 3D shape representations, the study integrated four Training on the currently largest publicly available 3D dataset. As shown in the figure below, the training data studied contains 876,000 training shapes. Among the four datasets, ShapeNetCore, 3D-FUTURE, and ABO contain high-quality human-verified 3D shapes, but only cover a limited number of shapes and dozens of categories. The Objaverse dataset is a recently released 3D dataset that contains significantly more 3D shapes and covers a more diverse object class. However, the shapes in the Objaverse are mainly uploaded by Internet users and have not been manually verified. Therefore, the quality is uneven and the distribution is extremely uneven, requiring further processing.
Text filtering and enrichment: Study found only between 3D shapes and 2D images Applying contrastive learning is insufficient to drive alignment of 3D shape and text spaces, even when trained on large-scale datasets. Research speculates that this is due to the inherent domain gap in CLIP's language and image representation spaces. Therefore, research needs to explicitly align 3D shapes with text. However, text annotations from original 3D data sets often face problems such as missing, wrong, or rough and single content. To this end, this paper proposes three strategies to filter and enrich text to improve the quality of text annotation: text filtering using GPT-4, subtitle generation and image retrieval of 2D renderings of 3D models.
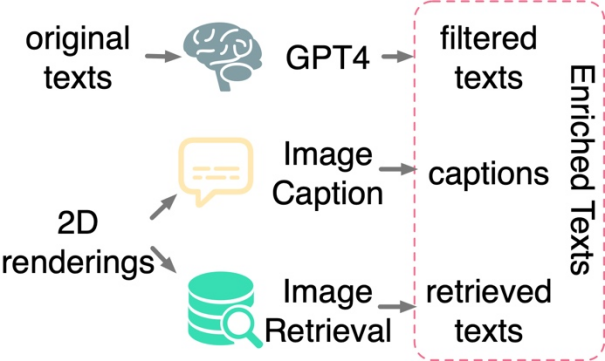
#The study proposed three strategies to automatically Filter and enrich noisy text in raw datasets.
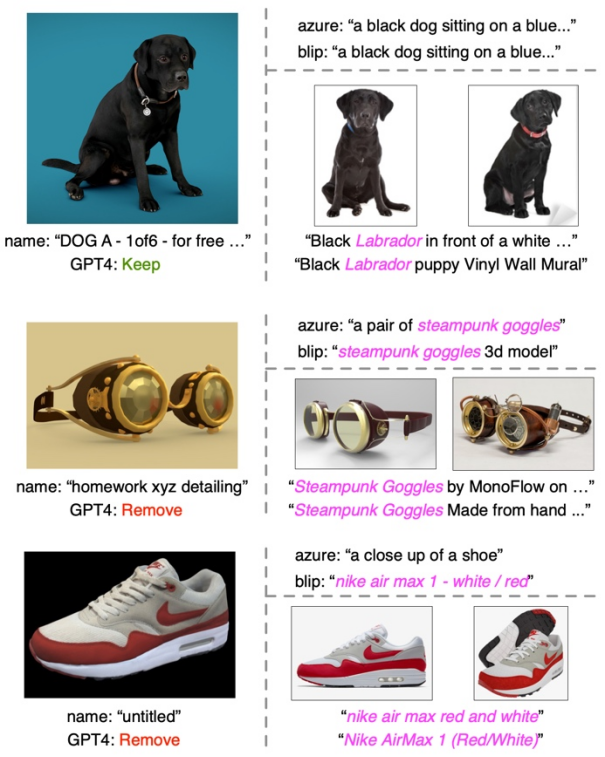
##Text filtering and enrichment examples
In each example, the left section shows the thumbnail, original shape name, and GPT-4 filtered results. The upper right part shows the image captions from the two captioning models, while the lower right part shows the retrieved image and its corresponding text.
Expand the three-dimensional backbone network. Since previous work on 3D point cloud learning mainly targeted small-scale 3D data sets like ShapeNet, these backbone networks may not be directly applicable to our large-scale 3D training, and the scale of the backbone network needs to be expanded accordingly. The study found that different 3D backbone networks exhibited different behaviors and scalability when trained on data sets of different sizes. Among them, PointBERT based on Transformer and SparseConv based on three-dimensional convolution show more powerful performance and scalability, so they were selected as the three-dimensional backbone network.
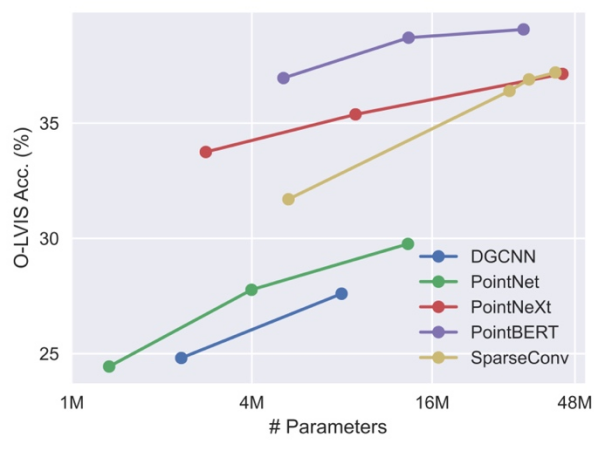
When scaling up the size of the 3D backbone model on the integrated dataset, the Performance and scalability comparison.
Difficult Negative Example Mining: The ensemble dataset of this study exhibits a high degree of class imbalance. Some common categories, like architecture, may occupy tens of thousands of shapes, while many other categories, like walruses and wallets, are underrepresented with only a few dozen or even fewer shapes. Therefore, when batches are randomly constructed for contrastive learning, shapes from two easily confused categories (e.g., apples and cherries) are unlikely to appear in the same batch to be contrasted. To this end, this paper proposes an offline difficult negative example mining strategy to improve training efficiency and performance.
Welcome to try the interactive demo on HuggingFace.The above is the detailed content of Open-world understanding of 3D point clouds, classification, retrieval, subtitles and image generation. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



