

这篇讨论文关注的主要问题是3D目标检测技术在自动驾驶进程中的应用。尽管环境视觉相机技术的发展为3D目标检测提供了高分辨率的语义信息,这种方法因无法精确捕获深度信息和在恶劣天气或低光照条件下的表现不佳等问题而受限。针对这一问题,讨论提出了一种结合环视相机和经济型毫米波雷达传感器的多模式3D目标检测新方法——RCBEVDet。该方法通过综合使用多传感器的信息,提供了更丰富的语义信息以及在恶劣天气或低光照条件下的表现不佳等问题的解决方案。针对这一问题,讨论提出了一种结合环视相机和经济型毫米波雷达传感器的多模式3D目标检测新方法——RCBEVDet。通过综合使用多模传感器的信息,RCBEVDet能够提供高分辨率的语义信息,并在恶劣天气或低光照条件下表现出良好的性能。该方法的提出对于改善自动
RCBEVDet的核心在于两个关键设计:RadarBEVNet和Cross-Attention Multi-layer Fusion Module(CAMF)。RadarBEVNet旨在有效提取雷达特征,它包括双流雷达主干网络RCS(雷达截面积)感知的BEV(鸟瞰图)编码器。这样的设计利用了点云基和变换器基编码器处理雷达点,通过交互更新雷达点特征,同时将雷达特定的RCS特性作为目标大小的先验信息来优化BEV空间的点特征分布。 CAMF模块通过多模态交叉注意力机制解决了雷达点的方位误差问题,实现了雷达和相机的BEV特征图的动态对齐以及通过通道和空间融合的多模态特征自适应融合。 在实现中,通过交互更新雷达点特征,同时将雷达特定的RCS特性作为目标大小的先验信息来优化BEV空间的点特征分布。CAMF模块通过多模态交叉注意力机制解决了雷达点的方位误差问题,实现了雷达和相机的BEV特征图的动态对齐以及通过通道和空间融合的多模态特征自适应融合。
论文提出的新方法通过以下几点实现对现有问题的解决:
论文的主要贡献如下:
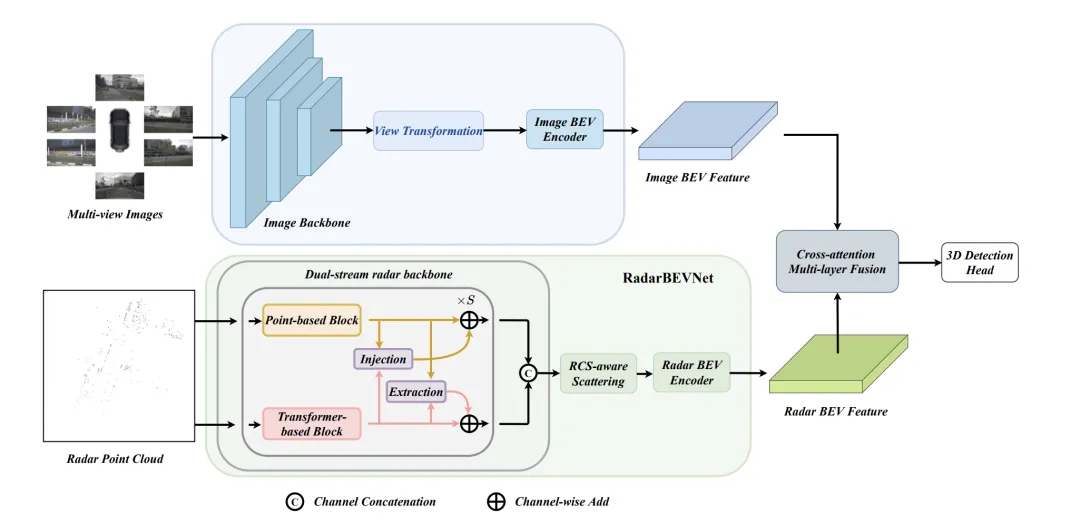
RadarBEVNet是本论文提出的用于有效雷辆BEV(鸟现图)特征提取的网络架构,主要包括两个核心组成部分:双流雷达主干网络和RCS(雷达截面积)感知的BEV编码器。 双流雷达主干网络用于从多通道雷达数据中提取丰富的特征表示。它基于深度卷积神经网络(CNN)构建,在嵌套的卷积和池化层之间交替进行特征提取和降维操作,以逐渐获得抽
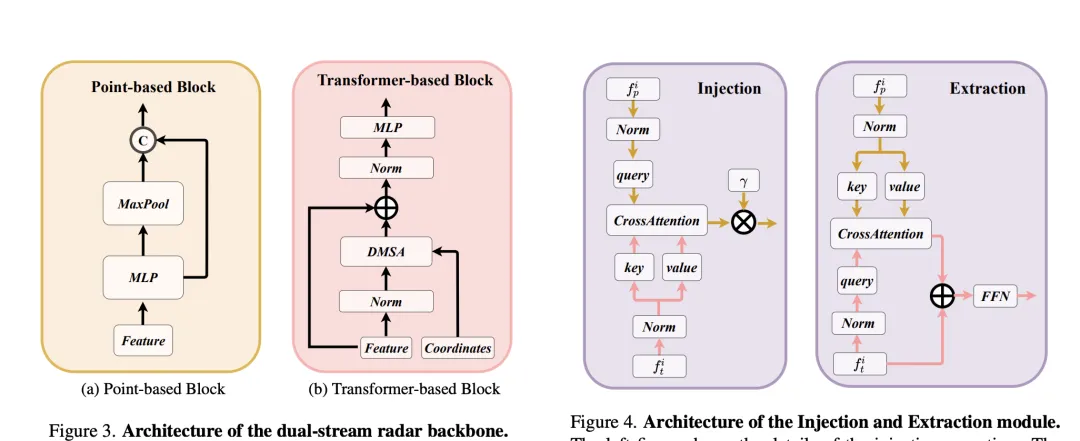
双流雷达主干网络由点基主干干和变换器基主干组成。点基主干网络通过多层感知机(MLP)和最大池化操作学习部雷达特征,其过程可以简化为以下公式:
在这里的表示雷达点特征,通过MLP增加特征维度后,再通过最大池化操作提取全局信息并与高维特征连接。
变换器基于干扰量块,引入了距离调制的注意力机制(DMSA),通过考虑雷达点之间的距离信息,优化模型聚集邻近信息的能力,促进模型的收敛。DMSA机制的自注意力可以表示为:
为了解决传统雷达BEV编码器产生的BEV特征稀疏性问题,提出了RCS感知的BEV编码器。它利用RCS作为目标大小的先验信息,将雷达点特征散布到BEV空间中的多个像素上,而不是单一像素,以增加BEV特征的密度。该过程通过以下公式实现:
其中,为基于RCS的高斯式BEV权重图,通过最大化所有雷达点的权重图来优化。最终,将RCS散布得到的特征与连接并通过MLP处理,得到最终的RCS感知BEV特征。
整体而言,RadarBEVNet通过结合双流雷达主干网络和RCS感知的BEV编码器,高效地提取雷达数据的特征,并通过RCS作为目标大小的先验,优化了BEV空间的特征分布,为之后的多模态融合提供了强大的基础。
Cross-Attention Multi-layer Fusion Module (CAMF)是一种用于动态对齐和融合多模态特征的高级网络结构,特别针对雷达和相机生成的鸟瞰图(BEV)特征的动态对齐和融合设计。这一模块主要解决了由于雷达点云的方位误差导致的特征不对齐问题,通过变形的交叉注意力机制(Deformable Cross-Attention),有效地捕获雷达点的微小偏差,并减少了标准交叉注意力的计算复杂度。
CAMF利用变形交叉注意力机制来对齐相机和雷达的BEV特征。给定相机和雷达的BEV特征和,首先给和添加可学习的位置嵌入,然后将转换为查询和参考点,作为键和值。多头变形交叉注意力的计算可以表示为:
其中表示注意力头的索引,表示采样键的索引,是总的采样键数。表示采样偏移,是由和计算得到的注意力权重。
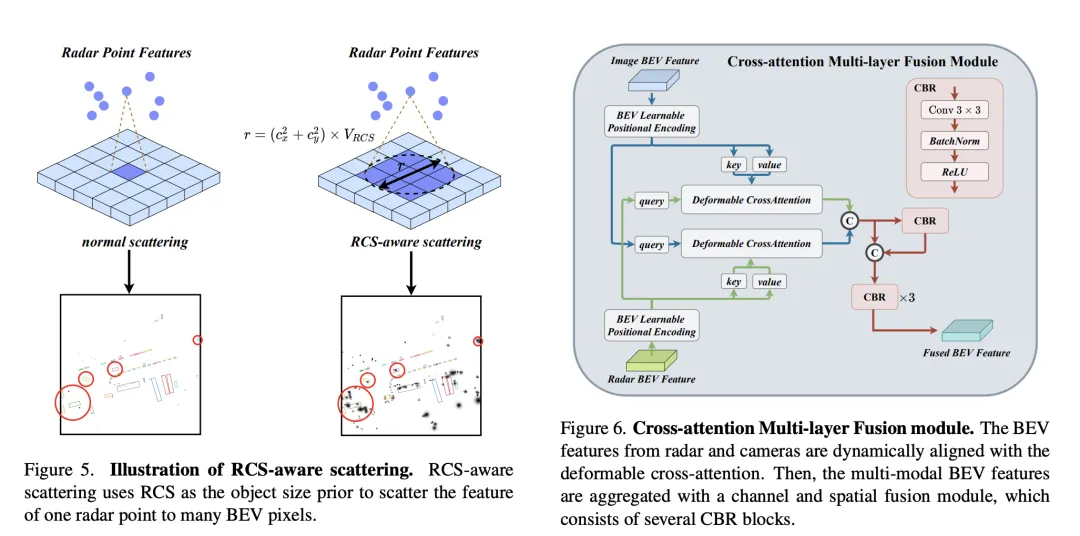
在通过交叉注意力对齐相机和雷达的BEV特征之后,CAMF使用通道和空间融合层来聚合多模态BEV特征。具体地,首先将两个BEV特征串联为,然后将送入CBR(卷积-批归一化-激活函数)块并通过残差连接获得融合特征。CBR块依次由一个的卷积层、一个批归一化层和一个ReLU激活函数组成。之后,连续应用三个CBR块以进一步融合多模态特征。
通过上述过程,CAMF有效地实现了雷达和相机BEV特征的精确对齐和高效融合,为3D目标检测提供了丰富而准确的特征信息,从而提高了检测性能。
在VoD验证集上的3D目标检测结果比较中,RadarBEVNet通过融合相机和雷达数据,在整个标注区域内和兴趣区域内的平均精度(mAP)表现上均展现了优秀的性能。具体来说,对于整个标注区域,RadarBEVNet在汽车、行人和骑行者的检测上分别达到了40.63%、38.86%和70.48%的AP值,将综合mAP提升到了49.99%。而在兴趣区域,即靠近本车的驾驶通道内,RadarBEVNet的表现更为突出,分别在汽车、行人和骑行者的检测上达到了72.48%、49.89%和87.01%的AP值,综合mAP达到了69.80%。
这些结果揭示了几个关键点。首先,RadarBEVNet通过有效融合相机和雷达输入,能够充分利用两种传感器的互补优势,提升了整体的检测性能。相较于仅使用雷达的方法如PointPillar和RadarPillarNet,RadarBEVNet在综合mAP上有明显的提升,这表明多模态融合对于提高检测精度尤为重要。其次,RadarBEVNet在兴趣区域内的表现特别优秀,这对于自动驾驶应用来说尤为关键,因为兴趣区域内的目标通常对即时驾驶决策影响最大。最后,虽然在汽车和行人的检测上,RadarBEVNet的AP值略低于某些单一模态或其他多模态方法,但在骑行者检测和综合mAP表现上,RadarBEVNet展现了其综合性能的优势。RadarBEVNet通过融合相机和雷达的多模态数据,实现了在VoD验证集上的优异表现,特别是在对自动驾驶至关重要的兴趣区域内展现了强大的检测能力,证明了其作为一种有效的3D目标检测方法的潜力。
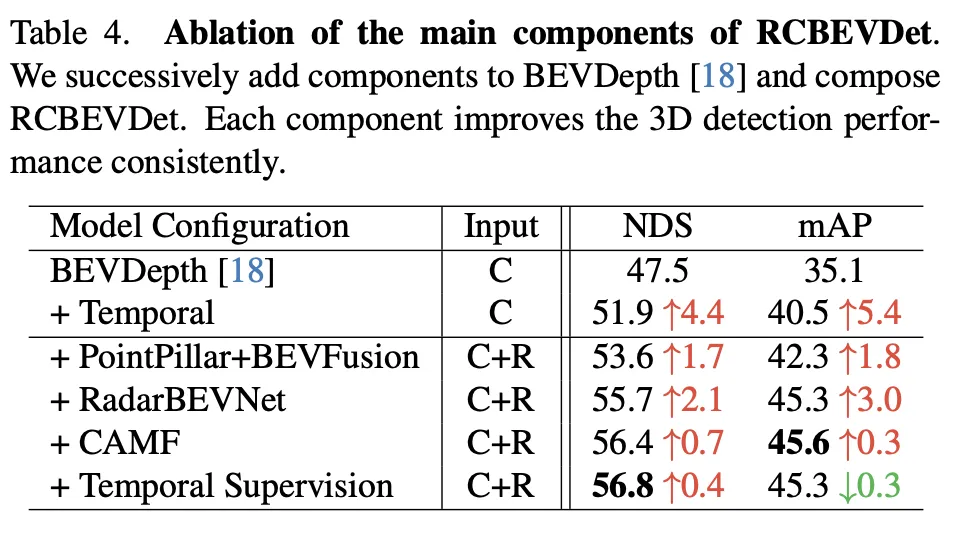
这个消融实验展示了RadarBEVNet在逐步添加主要组件时,对3D目标检测性能的持续改进。从基准模型BEVDepth开始,每一步增加的组件都显着提高了NDS(核心度量标准,反映了检测精度和完整性)和mAP(平均精确度,反映了模型对目标的检测能力)。
总的来说,这一系列的消融实验清晰地展示了RadarBEVNet中每个主要组件对于提高3D目标检测性能的贡献,从时间信息的引入到复杂的多模态融合策略,每一步都为模型带来了性能上的提升。特别是,对雷达和相机数据的精细处理和融合策略,证明了在复杂的自动驾驶环境中,多模态数据处理的重要性。
论文提出的RadarBEVNet方法通过融合相机和雷达的多模态数据,有效地提升了3D目标检测的准确性和鲁棒性,尤其在复杂的自动驾驶场景中表现出色。通过引入RadarBEVNet和Cross-Attention Multi-layer Fusion Module(CAMF),RadarBEVNet不仅优化了雷达数据的特征提取过程,还实现了雷达和相机数据之间精准的特征对齐和融合,从而克服了单一传感器数据使用中的局限性,如雷达的方位误差和相机在低光照或恶劣天气条件下的性能下降。
优点方面,RadarBEVNet的主要贡献在于其能够有效处理并利用多模态数据之间的互补信息,提高了检测的准确度和系统的鲁棒性。 RadarBEVNet的引入使得雷达数据的处理更为高效,而CAMF模块确保了不同传感器数据之间的有效融合,弥补了各自的不足。此外,RadarBEVNet在实验中展现了在多个数据集上的优异性能,尤其是在自动驾驶中至关重要的兴趣区域内,显示了其在实际应用场景中的潜力。
缺点方面,尽管RadarBEVNet在多模态3D目标检测领域取得了显著成果,但其实现的复杂性也相应增加,可能需要更多的计算资源和处理时间,这在一定程度上限制了其在实时应用场景中的部署。此外,虽然RadarBEVNet在骑行者检测和综合性能上表现优秀,但在特定类别上(如汽车和行人)的性能仍有提升空间,这可能需要进一步的算法优化或更高效的特征融合策略来解决。
总之,RadarBEVNet通过其创新的多模态融合策略,在3D目标检测领域展现了显着的性能优势。尽管存在一些局限性,如计算复杂度较高和在特定检测类别上的性能提升空间,但其在提高自动驾驶系统准确性和鲁棒性方面的潜力不容忽视。未来的工作可以聚焦于优化算法的计算效率和进一步提高其在各类目标检测上的表现,以推动RadarBEVNet在实际自动驾驶应用中的广泛部署。
论文通过融合相机和雷达数据,引入了RadarBEVNet和Cross-Attention Multi-layer Fusion Module(CAMF),在3D目标检测领域展现出显着的性能提升,特别是在自动驾驶的关键场景中表现优异。它有效地利用了多模态数据之间的互补信息,提高了检测准确性和系统的鲁棒性。尽管存在计算复杂度高和在某些类别上性能提升空间的挑战,\ours在推动自动驾驶技术发展,尤其是在提升自动驾驶系统的感知能力方面,展现了巨大的潜力和价值。未来工作可以关注于优化算法效率和进一步提升检测性能,以便更好地适应实时自动驾驶应用的需求。
以上是RV融合性能拉爆!RCBEVDet:Radar也有春天,最新SOTA!的详细内容。更多信息请关注PHP中文网其他相关文章!





















