

1月22日,地平线将纯视觉自动驾驶算法——Sparse4D系列算法开源,推动行业更多开发者共同参与到端到端自动驾驶、稀疏感知等前沿技术方向的探索中。目前,Sparse4D算法已在GitHub平台上线,开发者可关注地平线GitHub官方账号“Horizon Robotics”获取源码。
Sparse4D是迈向长时序稀疏化3D目标检测的系列算法,属于时序多视角融合感知技术的范畴。面向稀疏化感知的行业发展趋势,Sparse4D搭建了纯稀疏的融合感知框架,让感知算法效率更高、精度更高,让感知系统更简洁。相比稠密BEV算法,Sparse4D降低了计算复杂度,打破了算力对感知范围的限制,在感知效果和推理速度上,都实现了对稠密BEV算法的超越。在nuScenes纯视觉3D检测和3D跟踪两个榜单上,Sparse4D均位列第一,成为SOTA,领先于包括SOLOFusion、BEVFormer v2和StreamPETR在内的一众最新方法。
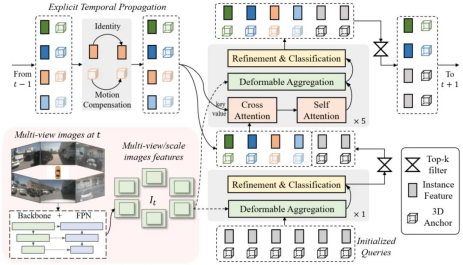
Sparse4D算法架构
经过三版迭代,地平线Sparse4D团队成功地攻克了提升稀疏算法性能、降低时序融合计算复杂度和实现端到端目标跟踪等技术难题。最近,他们发表了题为《Sparse4D v3: Advancing End-to-End 3D Detection and Tracking》的论文,详细介绍了他们的研究成果。通过利用地平线业务数据进行性能验证,Sparse4D团队已经成功在地平线征程5计算方案上进行了部署。未来,根据规划,Sparse4D技术将应用于地平线下一代产品中。这一成果的取得将进一步推动地平线的发展。
地平线副总裁兼软件平台产品线总裁余轶南博士指出,当前的行业已经进入了感知端到端的时代,只需一个网络即可完成整个感知任务。他认为,Sparse4D系列算法将稀疏类算法的性能提升到了一个新的高度,并成功实现了端到端的多目标跟踪。这对于稀疏感知和端到端自动驾驶来说都具有重要意义,可以说是一个里程碑式的突破。地平线公司选择将Sparse4D开源给整个行业,希望能与行业中的优秀开发者共同进步。
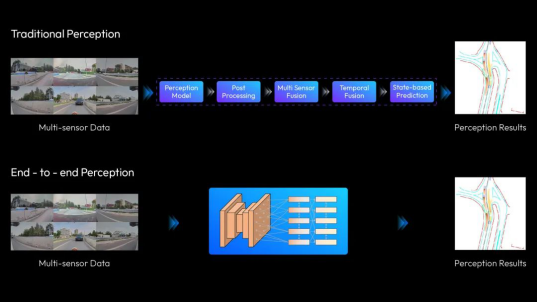
传统感知系统和端到端感知系统的对比
地平线积极参与智能驾驶开源软件生态建设的又一范例是开源Sparse4D系列算法。这一算法在纯视觉、端到端自动驾驶的落地进程中具有巨大的应用潜力。此外,地平线还开源了VAD算法和MapTR算法等领先技术,这些技术将进一步推动行业的发展。预计Sparse4D算法将受到行业开发者的广泛关注和使用。地平线的持续努力将加速行业的发展进程。
地平线秉持着将自主创新的技术、突破性产品与解决方案转化为智能汽车产业生态合作伙伴商业价值的理念,为行业的发展注入活力。通过与产业各方紧密协同、开放融合、合作创新,地平线致力于成为智能汽车产业生态的源头活水,为其提供持续的发展动力。地平线深知自动驾驶的量产是一项重要的突破,因此我们将继续拥抱开源开放,加速前沿技术的落地和量产化进程。我们坚信与行业共赢的未来将会更加广阔,地平线将持续努力,为智能汽车产业的繁荣做出贡献。
以上是地平线发布开源的Sparse4D算法,推动向端到端自动驾驶迈进一步的详细内容。更多信息请关注PHP中文网其他相关文章!





















