

自动泊车系统是指车辆在无人工干预的情况下,能够自主寻找停车位并完成准确的泊车,同时也可以根据用户需求移动到指定位置。该技术的成熟将极大地缓解人们在泊车过程中的不便,例如长时间寻找停车位浪费时间,以及在寻找停车位时可能出现的车辆碰撞和摩擦等安全问题。
目前,许多技术公司和高校实验室正在探索自动泊车领域。奔驰、博世等公司已建立泊车基础设施,NVIDIA正在开发停车场自动驾驶算法和停车位检测方法,宝马也将自动泊车模块安装在生产车辆上。
考虑到自动泊车技术在工业界的广泛需求,我们对自动泊车系统的发展状态进行系统性的调研。包括自动泊车系统的行业标准趋势、性能评测指标、自动泊车系统各个子模块设计到的技术等。
由于目前自动泊车系统受到了来自工业界和学术界的广泛关注,各个国家和公司都在不断的开发自动泊车技术。所以对于制定自动泊车技术的标准就变的格外重要。目前已经制定的技术标准包括地理信息、室外定位、室内空间定位、停车标准以及车辆通信标准几个方面的内容,具体标准汇总在如下的表格中。
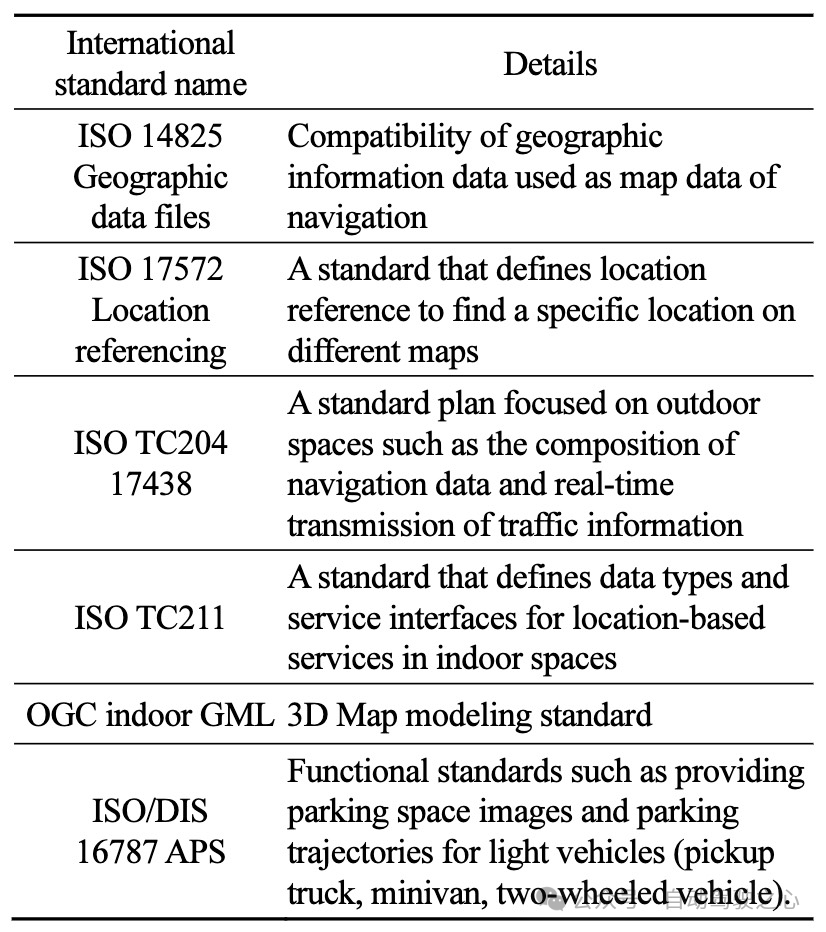
自动泊车行业的相关标准
目前自动泊车系统的评测包括两部分,分别是自动驾驶部分的评测以及自动泊车部分的评测。
自动驾驶技术的评测遵循汽车工程协会所制定的“自动驾驶技术阶段”标准,该标准将自动驾驶技术分为六个层级,根据技术水平、控制主体和驱动能力进行分类。为了更方便地评估各个层级,在研发中的ISO/WD 34501和ISO/WD 34502标准被提出。ISO/WD 34501标准适用于第三级系统中测试场景的术语和定义,而ISO/WD 34502标准则提供了测试场景的指南和安全评估过程。这些标准的制定旨在为自动驾驶技术的开发和应用提供统一的评测准则,推动自动驾驶技术的发展。
尽管自动泊车技术目前备受关注,但国际标准的制定仍处于初级阶段。与自动驾驶评测标准不同,自动泊车的技术水平主要依靠开发人员的评估标准来衡量。
下表展示了交通状况场景系统中自主停车场景的样例,停车场景根据性能级别划分。
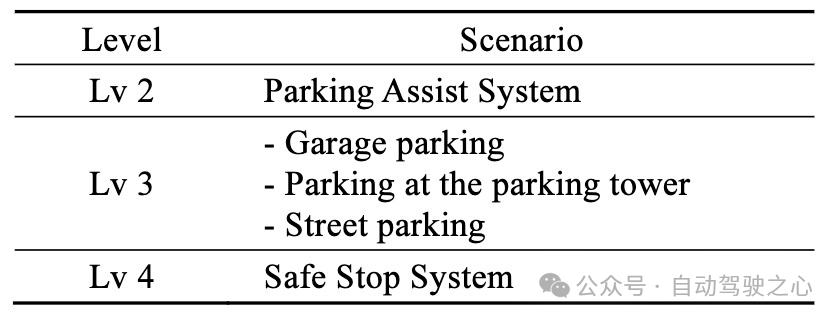
自动泊车级别划分
在交通状况场景系统评估包括自动驾驶和停车两部分场景,并且使用汽车工程协会定义的“自动驾驶技术阶段“来指出自动泊车的能力。目前该系统当中包含三个层级。
目前自动泊车系统当中主要包括三部分的内容,如下图所示,分别是搜索驾驶过程,自动泊车过程以及返回驾驶过程。我们先对每个过程做一个大致的介绍,然后再介绍每个过程目前各自的发展趋势。
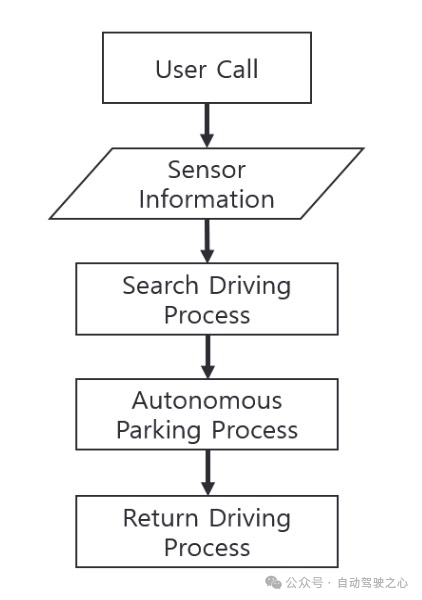
自动泊车系统的工作流程
搜索驾驶过程的最终目标就是在停车场当中汽车可以自主的找到一个停车位,所以该过程需要用到定位、防撞以及停车位检测技术。
定位技术介绍
在自动泊车系统当中,可以使用GPS或者车辆自带的IMU传感器来确认车辆的速度和姿态并且纠正车辆的位置估计误差。但是在某些室内场景,是无法接收到GPS信号的。所以自动驾驶车辆就需要配备相机、激光雷达以及毫米波雷达进行辅助。下图是车辆上配备的一些传感器信息的介绍。
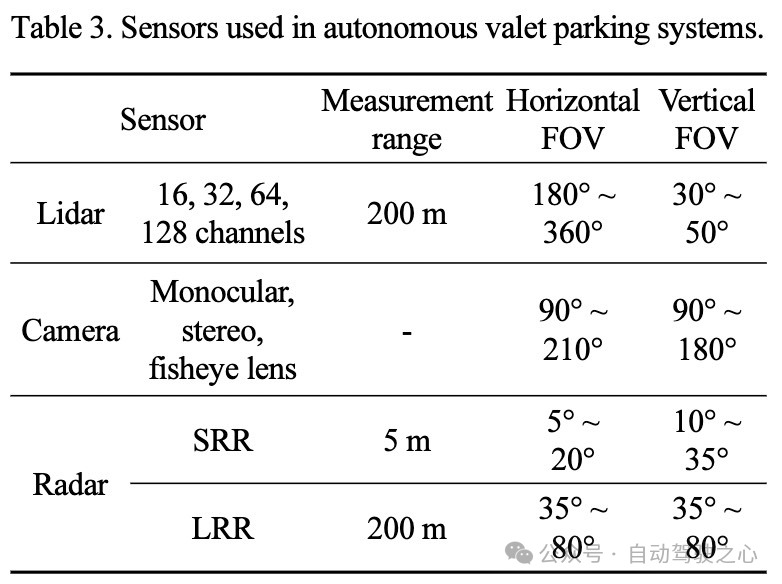
自动泊车车辆配备的传感器信息的介绍
再获得了这些不同传感器采集到的信息之后,就可以利用SLAM建图技术对自动驾驶车辆周围的环境进行重建,从而实现对车辆的定位。而SLAM建图技术又可以分成以下两大类
防碰撞技术介绍
由于自动泊车系统的主要应用场景是在停车场,而停车场中会停有很多车辆,所以防碰撞技术非常重要。在防碰撞技术中,主要会使用超声波传感器、短波雷达传感器、激光雷达传感器以及相机传感器。声波以及雷达传感器主要是用来实现准确的测距。相机传感器主要是利用同一物体在连续图像中位置的差异来估计深度上的距离。
停车位检测技术
停车位检测是在搜索驾驶的过程中不断执行的,通常会包括传统的计算机视觉、深度学习以及两种方法的混合实现。
传统的计算机视觉主要是指定和识别停车位的形状,如车位线检测以及特征点检测,如下图所示。
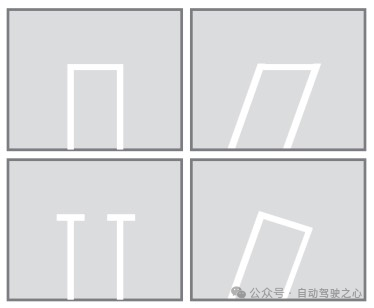
车位形状的例子说明
得益于深度学习的快速发展,目前基于CNN网络的方法被广泛应用于停车位检测当中。下图表示了用于停车位检测的代表性卷积神经网络结构。卷积层学习输入图像的特征,特征数据通过全连接层得到输出。由于这是一个完全监督的学习过程,输出由训练数据中的标记来直接决定。
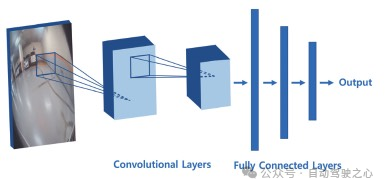
基于卷积神经网络的停车位检测流程
如果上一步的搜索驾驶过程找到了可用的停车位后,系统就会调用自动泊车过程。一般来说,我们会使用路径生成方法实现自主泊车过程。目前主流的路径生成方法主要有基于算法的方法以及基于强化学习的方法。
基于算法的方法涉及计算停车位的位置和形状的路径以及车辆的当前位置。算法为了计算出合适的停车路径会涉及最优控制问题、基于网格的路径规划方法以及快速探索随机树等算法。
基于强化学习的方法可以为自动泊车模拟器中的自主停车过程生成最优路径。在自动泊车模拟器中,车辆会学习一个通用的停车过程。该学习方法通过重复路径的生成过程和评估来不断获得停车精度最高的最优路径,如下图所示。
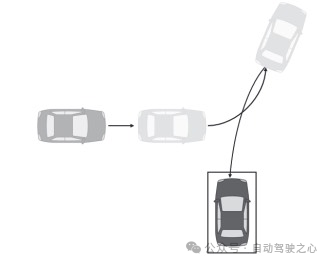
自动泊车的反向停车过程
返回驾驶过程是指在自动驾驶车辆驶入停车位进行等待的时候,用户可以对车辆进行调用,使其移动到用户指定好的地方。在这个过程当中,我们需要使用到路径跟踪技术。
目前而言,路径跟踪技术包括跟踪行进路径的方法以及跟踪修改路径的方法。但是这两种方法都使用了类似的车辆控制算法,具体可以参考论文【1-2】。其大体思路就是在考虑车辆当前位置和转向角条件的情况下,执行沿着生成路径移动车辆的控制命令。
由于目前自动泊车技术的需求逐渐增加,各个国家和厂商都在大力发展自动泊车系统。考虑到自动泊车技术的快速发展,在这篇文章中,我们总结了自动泊车系统当中的标准化趋势、评测标准以及自动泊车各个组成系统的进行详细的介绍,希望可以给大家带来帮助~

原文链接:https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
以上是普遍研究自动停车,整合行业标准、趋势评估和系统介绍的详细内容。更多信息请关注PHP中文网其他相关文章!





















