

本文提出了一套离线3D物体检测算法框架DetZero,通过在 Waymo 公开数据集上进行全面的研究和评估,DetZero可生成连续且完整的物体轨迹序列,并充分利用长时序点云特征显着提升感知结果的质量。同时以 85.15 mAPH (L2) 的性能在 WOD 3D 物体检测排行榜上取得排名第一。此外,DetZero可以为在线模型的训练提供高质量的自动标签,其结果已经达到甚至高于人工标签的水平。
这是论文链接:https://arxiv.org/abs/2306.06023
需要重新写的内容是:代码链接:https://github.com/PJLab-ADG/DetZero
请访问主页链接:https://superkoma.github.io/detzero-page
为了提高数据标注的效率,我们研究了一种新的方法。这种方法基于深度学习和无监督学习,可以自动生成标注数据。通过使用大量的未标注数据,我们可以训练一个自动驾驶感知模型,使其能够识别和检测道路上的物体。这种方法不仅可以减少标注数据的成本,还可以提高后处理的效率。我们在实验中使用了Waymo的离线3D物体检测方法3DAL[]作为基准进行比较,结果表明我们提出的方法在准确性和效率方面都有显著的改进。我们相信这种方法将在未来的自动驾驶技术中发挥重要作用
然而,很多主流的在线3D目标检测方法通过利用点云的时序上下文特征,取得了比现有的离线3D检测方法更好的效果。然而,我们意识到这些方法未能有效地利用长序列点云的特征
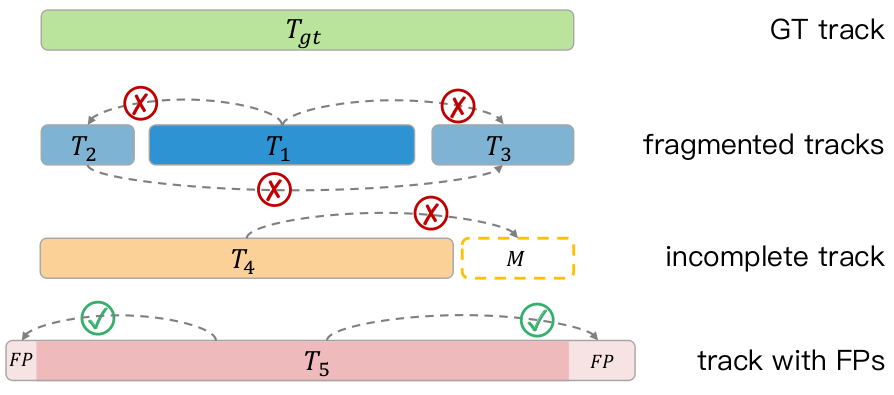 物体序列的质量会对下游的优化模型产生很大的影响
物体序列的质量会对下游的优化模型产生很大的影响
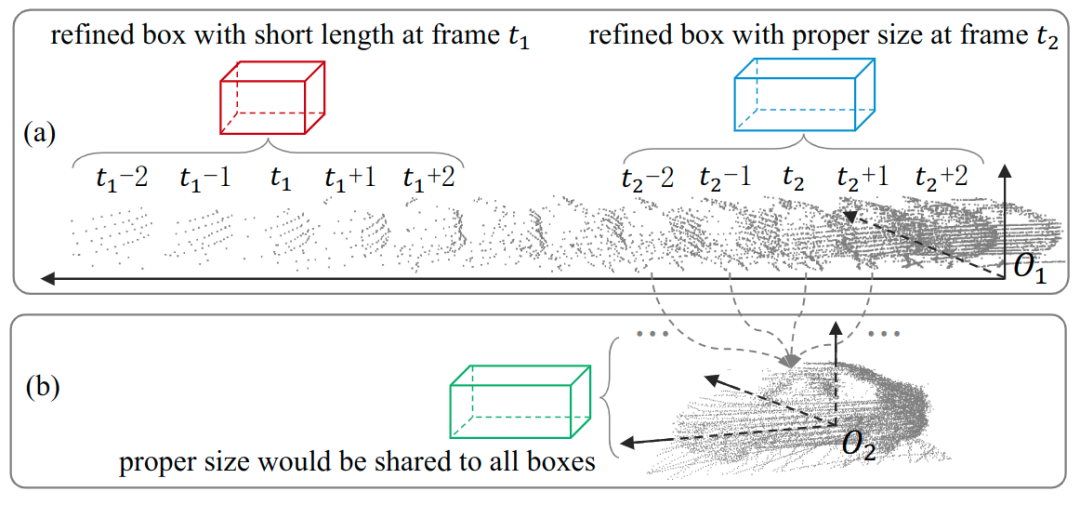 基于运动状态的优化模型预测物体的尺寸(a),几何优化模型将不同视角的点云全部聚合后预测物体的尺寸(b)
基于运动状态的优化模型预测物体的尺寸(a),几何优化模型将不同视角的点云全部聚合后预测物体的尺寸(b)
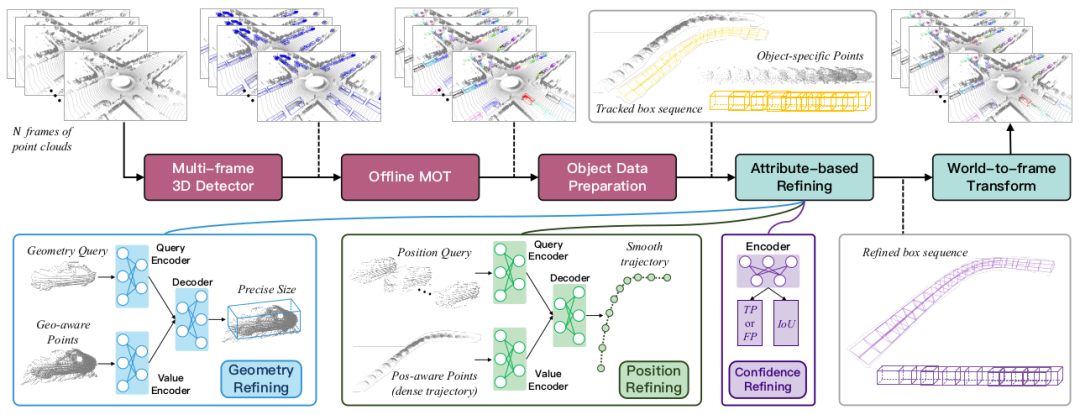
本文提出了一个名为DetZero的新离线3D物体检测算法框架。该框架具有以下特点:(1)使用多帧3D检测器和离线跟踪器作为上游模块,以提供准确和完整的物体跟踪,重点关注物体序列的高召回率(track-level recall);(2)下游模块包括基于注意力机制的优化模型,利用长时序点云特征分别学习预测物体的不同属性,包括精细化几何尺寸、平滑运动轨迹位置以及更新置信度分数
我们采用公开的CenterPoint[]作为基础检测器,为了提供更多的检测候选框,我们在三个方面进行了加强:(1)将不同帧点云组合作为输入,最大化性能而不降低性能;(2)使用点云密度信息将原始点云特征和体素特征融合为二阶段模块,以优化一阶段的边界结果;(3)使用推理阶段数据增强(TTA)、多模型结果融合(Ensemble)等技术来提高模型对复杂环境的适应能力
离线跟踪模块中引入了两阶段关联策略以减少错误匹配,根据置信度将框分为高分组和低分组,对高分组进行关联更新现有轨迹,未更新的轨迹与低分组关联。同时,物体轨迹的长度可持续至序列终止,避免ID切换问题。此外,我们会反向执行跟踪算法生成另一组轨迹,并通过位置相似性关联,最后用WBF策略融合匹配成功的轨迹,进一步提升序列首尾的完整性。最后,对于区分好的物体序列,提取出其对应的每一帧点云进行保存;而未更新的冗余框和一些较短的序列和会直接合并至最终的输出,无需下游优化。
以前的以物体为中心的优化模型忽略了物体之间在不同运动状态下的相关性,例如几何形状的一致性以及相邻时刻的物体运动状态的一致性。基于这些观察,我们将传统的边界框回归任务分解为三个模块:分别预测物体的几何形状、位置和置信度属性
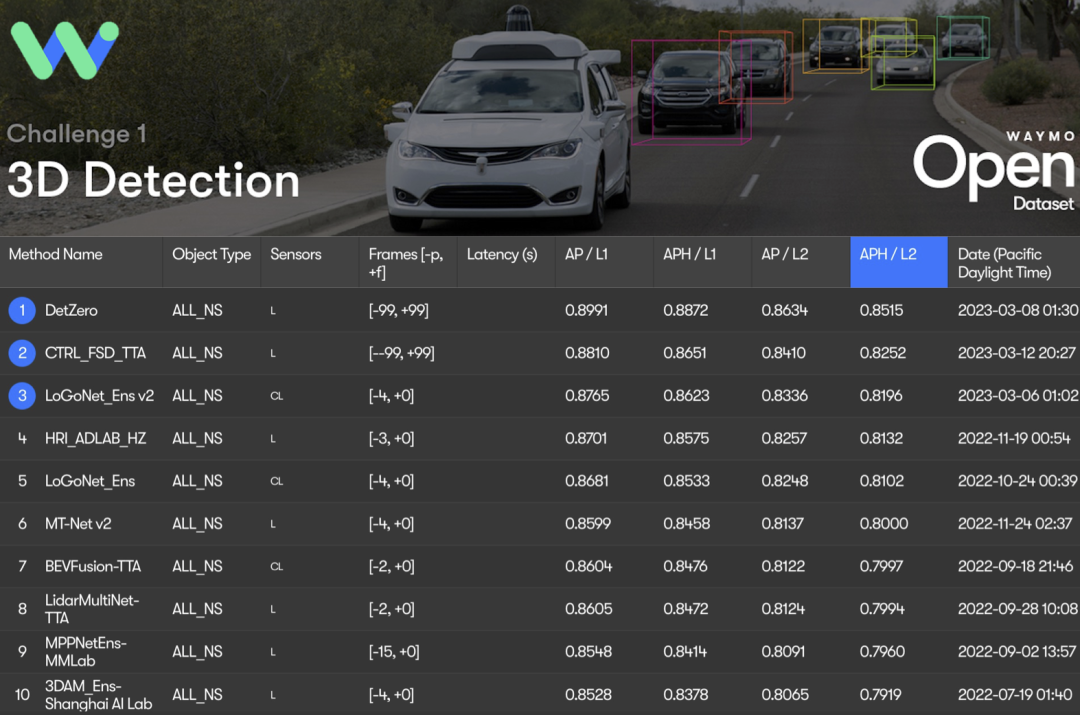
DetZero在Waymo 3D检测排行榜上以85.15 mAPH (L2)取得了最佳成绩,无论是与处理长时序点云的方法相比,还是与最先进的多模态融合3D检测器相比,DetZero都展现出了显著的性能优势
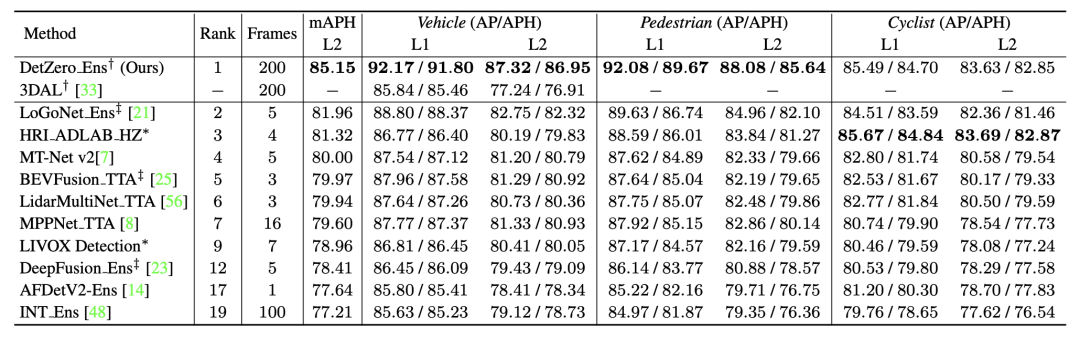 Waymo 3D检测排行榜结果,所有结果均使用TTA或ensemble技术,†指离线模型,‡指点云图像融合模型,*表示匿名提交结果
Waymo 3D检测排行榜结果,所有结果均使用TTA或ensemble技术,†指离线模型,‡指点云图像融合模型,*表示匿名提交结果
同样,得益于检测框的准确性和物体跟踪序列的完整性,我们以75.05 MOTA(L2)取得了Waymo 3D跟踪排行榜上的性能第一。
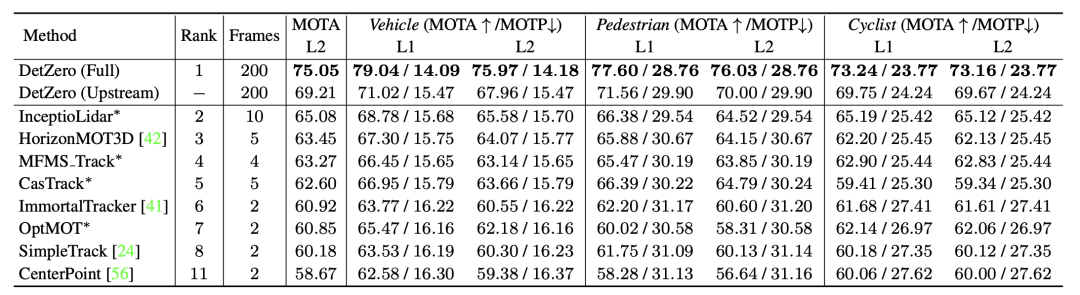 Waymo 3D跟踪排行榜,*表示匿名提交结果
Waymo 3D跟踪排行榜,*表示匿名提交结果
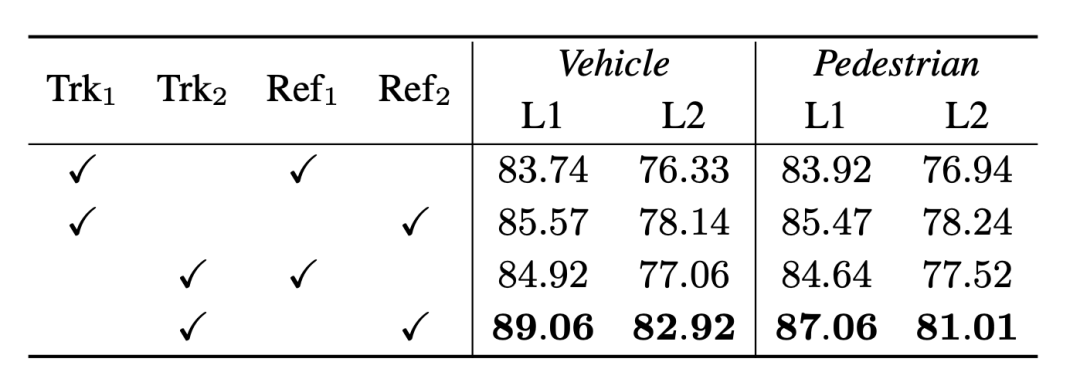
为了更好地验证我们提出的每个模块的作用,我们在Waymo验证集上进行了消融实验,并且采用了更严格的IoU阈值作为衡量标准
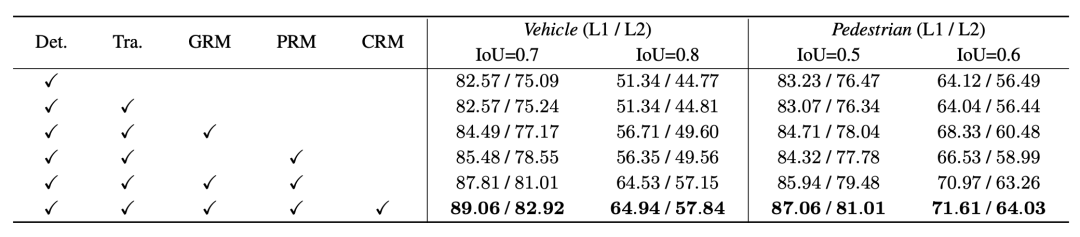 在Waymo验证集上对Vehicle和Pedestrian进行,IoU阈值分别选取标准值(0.7 & 0.5)和严格值(0.8 & 0.6)
在Waymo验证集上对Vehicle和Pedestrian进行,IoU阈值分别选取标准值(0.7 & 0.5)和严格值(0.8 & 0.6)
同时,对于同一组检测结果,我们分别选择3DAL中的跟踪器和优化模型与DetZero进行交叉组合验证,结果进一步证明DetZero的跟踪器和优化器性能更好,且二者组合在一起后发挥出更大的优势。
 不同上下游模块组合的交叉验证实验,下角标1和2分别代表3DAL和DetZero,指标是3D APH
不同上下游模块组合的交叉验证实验,下角标1和2分别代表3DAL和DetZero,指标是3D APH
我们的离线追踪器更注重物体序列的完整性,虽然两者的MOTA性能差异很小,但是Recall@track的性能却是导致最终优化性能差异很大的一个原因
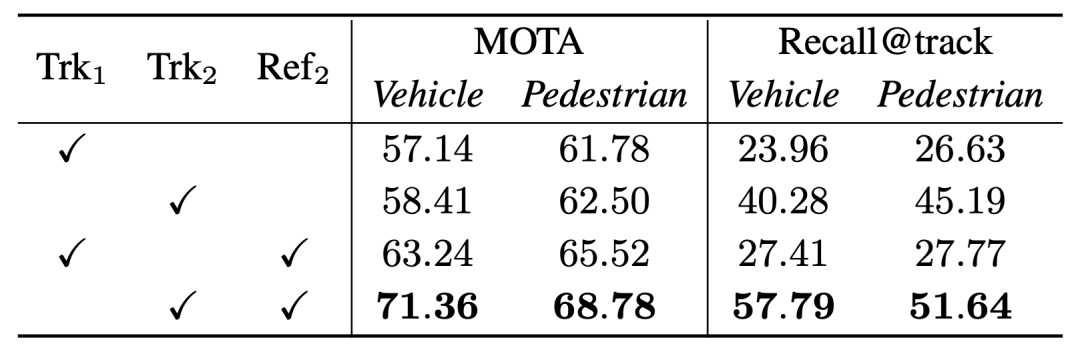 离线跟踪器(Trk2)与3DAL跟踪器(Trk1)的性能对比,性能为MOTA和Recall@track
离线跟踪器(Trk2)与3DAL跟踪器(Trk1)的性能对比,性能为MOTA和Recall@track
此外,与其他最先进的跟踪器相比,也能证明这一点
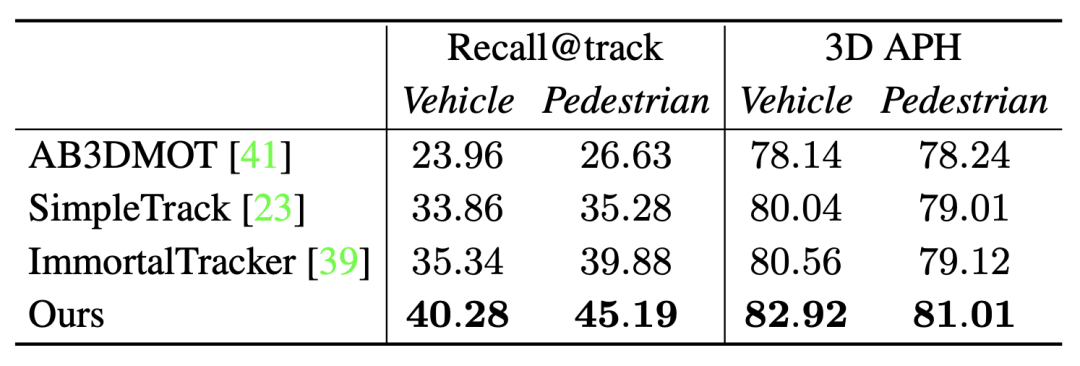 Recall@track是经过跟踪算法处理后的序列召回,3D APH是经过同一个优化模型处理后的最终性能
Recall@track是经过跟踪算法处理后的序列召回,3D APH是经过同一个优化模型处理后的最终性能
为了验证我们的优化模型是否能够固定拟合到特定的上游结果集,我们选择了具有不同性能的上游检测跟踪结果作为输入。结果显示,我们取得了明显的性能提升,进一步证明了只要上游模块能够召回更多更完整的物体序列,我们的优化器就能够有效地利用其时序点云的特征进行优化
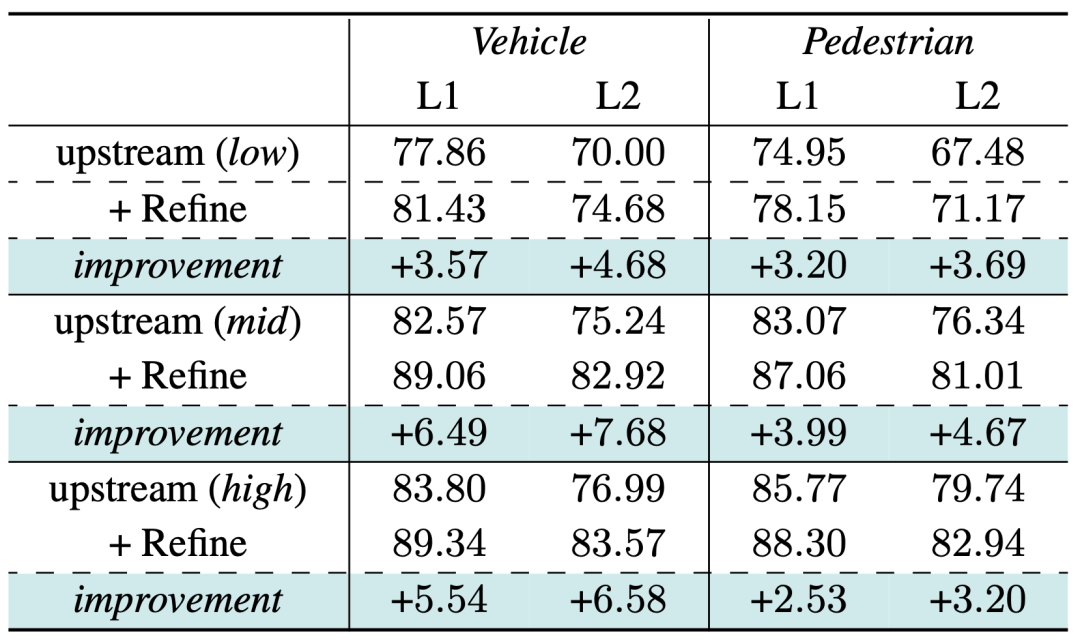 Waymo验证集上的泛化性能验证,指标是3D APH
Waymo验证集上的泛化性能验证,指标是3D APH
我们将根据3DAL的实验设置来报告DetZero在5个指定序列上的AP性能,通过比较基于单帧的重标注结果与原始真值标注结果的一致性来衡量人类性能。相对于3DAL和人类,DetZero在不同的性能指标上都表现出了优势
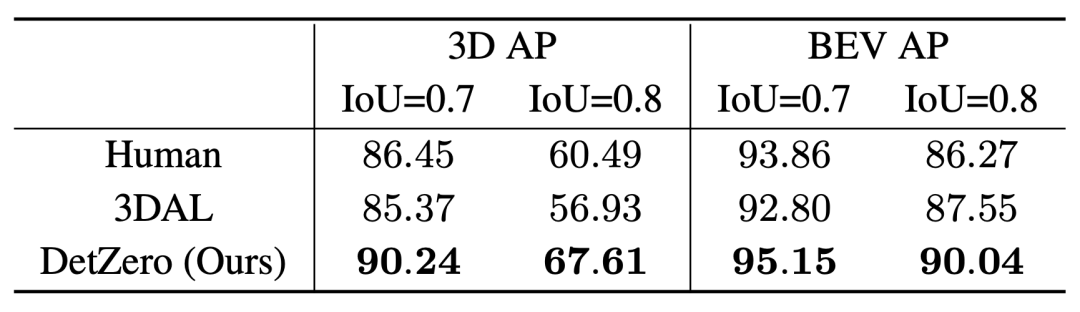 对于Vehicle类别在不同IoU阈值下的3D AP和BEV AP性能对比
对于Vehicle类别在不同IoU阈值下的3D AP和BEV AP性能对比
为了验证高质量的自动标注结果是否能够替代人工标注结果进行在线模型训练,我们在Waymo验证集上进行了半监督学习的验证。我们从训练数据中随机选择了10%作为老师模型(DetZero)的训练数据,并对剩下的90%数据进行推理,得到了自动标注的结果,这些结果将作为学生模型的标签。我们选择了单帧CenterPoint作为学生模型。在车辆类别上,使用90%的自动标签和10%的真值标签进行训练的结果接近于使用100%真值标签训练的结果,而在行人类别上,自动标签训练的模型结果已经优于原始结果,这表明自动标签可以用于在线模型训练
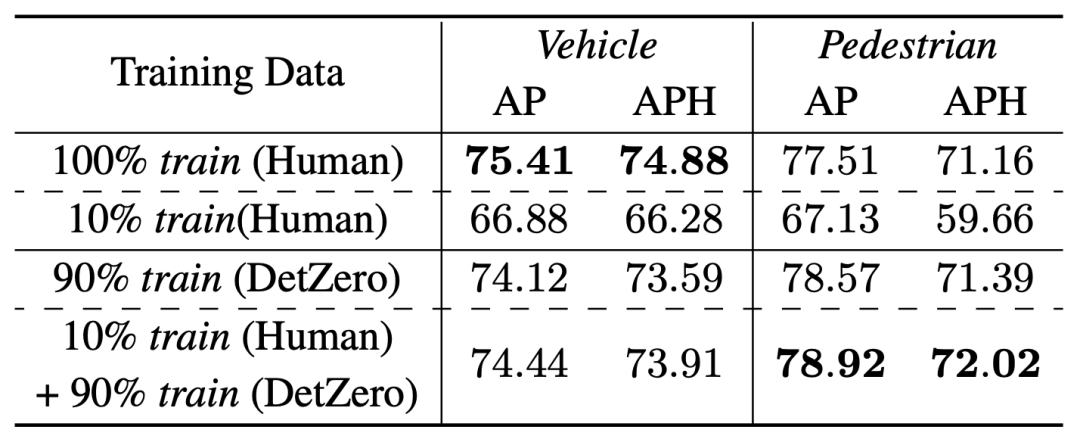 在Waymo验证集上进行的半监督实验结果
在Waymo验证集上进行的半监督实验结果
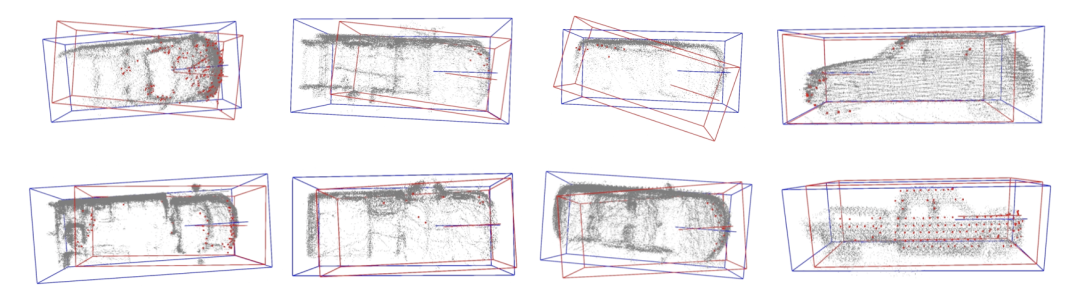 红色框代表上游的输入结果,蓝色框代表优化模型的输出结果
红色框代表上游的输入结果,蓝色框代表优化模型的输出结果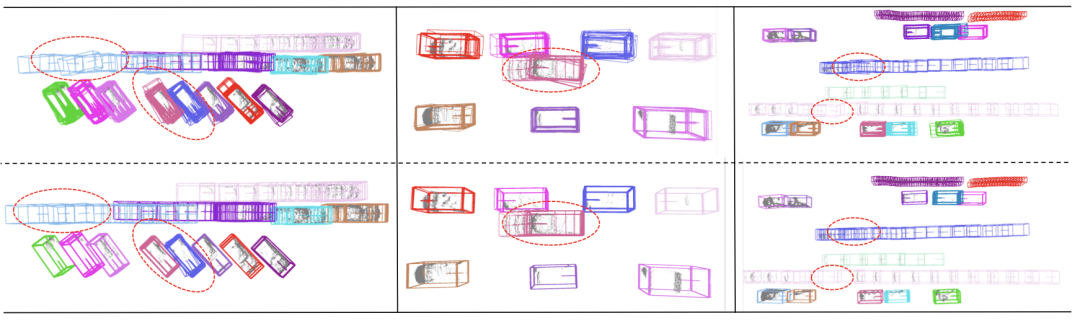 第一行代表上游的输入结果,第二行代表优化模型的输出结果,虚线内的物体表示优化前后差异明显的位置
第一行代表上游的输入结果,第二行代表优化模型的输出结果,虚线内的物体表示优化前后差异明显的位置

原文链接:https://mp.weixin.qq.com/s/HklBecJfMOUCC8gclo-t7Q
以上是DetZero:Waymo在3D检测榜单上位列第一,与人工标注媲美!的详细内容。更多信息请关注PHP中文网其他相关文章!





















