

北京大学董豪团队具身导航最新成果来了:
无需额外建图和训练,只需说出导航指令,如:
Walk forward across the room and walk through the panty followed by the kitchen. Stand at the end of the kitchen
我们就能控制机器人灵活移动。

在此,机器人靠的是主动与大模型构成的“专家团队”沟通完成指令分析、视觉感知、完成估计和决策测试等一系列视觉语言导航关键任务。

目前项目主页和论文都已上线,代码即将推出:

视觉语言导航涉及到一系列子任务,包括指令分析,视觉感知,完成估计和决策测试。
这些关键任务需要不同领域知识,它们环环相扣决定机器人的导航能力。
受到现实中专家讨论行为的启发,北大董豪团队提出DiscussNav导航系统。
作者首先以提示方式赋予LLM(大语言模型)和MLM(多模态大模型)专家角色和特定任务,激活它们的领域知识和能力,由此构建具备不同特长的视觉导航专家团队。

然后,作者设计了讨论问题语料库和讨论机制,遵循该机制,由LLM驱动的导航机器人可以主动发起一系列与视觉导航专家的讨论。
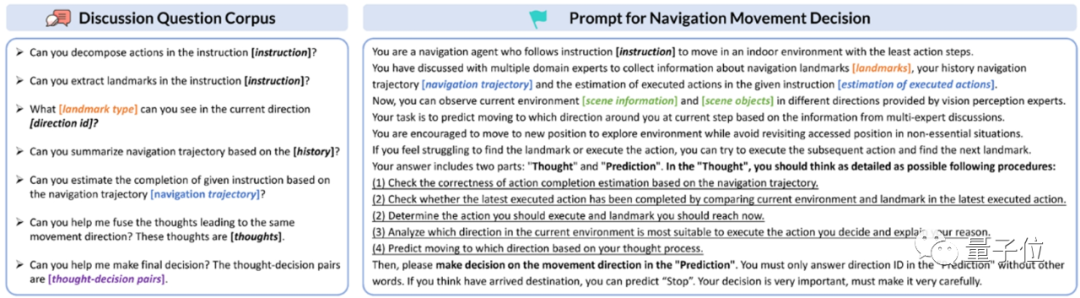
在每一步移动前,导航机器人都会与专家讨论来理解人类指令中要求的动作和提及的物体标志。
进而依据这些物体标志的类型有倾向性地对周围环境进行感知,指令完成情况估计,由此做出初步的移动决策。

在决策过程中,导航机器人会根据Chain-of-Thought(思维链)同时生成N个独立的预测结果,当这些预测结果之间不一致时,机器人会向决策测试专家求助,筛选出最终的移动决策。
从这个过程我们可以看到,相比传统方法需要进行额外的预训练,这个方法通过与大模型专家交互指导机器人根据人类指令移动,直接解决了机器人导航训练数据稀缺的问题。
更进一步,正是由于这个特点,它也实现了零样本能力,只要遵循以上讨论流程,就能follow多样的导航指令。
以下是DiscussNav在经典的视觉语言导航数据集Room2Room上的表现。

可以看到,它显著高于所有零样本方法,甚至超过两个经过训练的方法。
作者进一步在Turtlebot4移动机器人上开展真实室内场景导航实验。
凭借专家角色扮演和讨论激发出的大模型强大的语言和视觉泛化能力,DiscussNav在真实世界的表现明显优于之前最优的零样本方法和经过预训练微调的方法, 展现出良好的sim-to-real迁移能力。

通过实验,作者进一步发现,DiscussNav产生了4个强大的能力:
1、识别开放世界物体,比如“白色桌子上的机械手臂”,“椅子上的泰迪熊”。
2、识别细粒度的导航标志物体,比如“厨房柜台上的植物”,“桌上的纸箱”。
3、纠正其它专家在讨论中回复的错误信息,比如标志提取专家在从导航动作序列提取导航标志前会检查并纠正被错误分解的动作序列。
4、排除不一致的移动决策,比如决策测试专家们可以根据当前环境信息从DiscussNav预测的多个不一致的移动决策中选择最合理的一个作为最终移动决定。
通讯作者董豪在之前的报告中提出,深入探索如何有效利用仿真数据和大模型从海量数据中学习到的先验知识是未来具身智能研究的发展方向。
目前受限于数据规模和探索真实环境的高昂成本,具身智能研究仍将重点关注仿真平台实验和仿真数据训练。
近期大模型的进展为具身智能提供新方向,合理发掘和利用大模型中存在的语言常识和物理世界先验将推动具身智能发展。

论文地址: https://arxiv.org/abs/2309.11382
以上是北大具身智能新成果:无需训练,听指令就能灵活走位的详细内容。更多信息请关注PHP中文网其他相关文章!





















