

本文经自动驾驶之心公众号授权转载,转载请联系出处。
原标题:MotionLM: Multi-Agent Motion Forecasting as Language Modeling
论文链接:https://arxiv.org/pdf/2309.16534.pdf
作者单位:Waymo
会议:ICCV 2023
对于自动驾驶车辆安全规划来说,可靠地预测道路代理未来行为是至关重要的。本研究将连续轨迹表示为离散运动令牌序列,并将多智能体运动预测视为语言建模任务。我们提出的模型MotionLM具有以下几个优点:首先,它不需要使用锚点或显式潜变量来优化学习多模态分布。相反,我们利用标准的语言建模目标,最大化序列令牌的平均对数概率。其次,我们的方法避免了事后交互启发法,其中个体代理轨迹生成是在交互评分之后进行的。相反,MotionLM在单个自回归解码过程中生成了交互式代理未来的联合分布。此外,模型的顺序分解可以实现时间上的因果条件推断。我们提出的方法在Waymo Open Motion Dataset上取得了新的最先进性能,排名第一于交互式挑战排行榜
在这篇文章中,我们将多智能体运动预测作为一项语言建模任务进行讨论。我们引入了时间因果解码器,对经过因果语言建模损失训练的离散运动令牌进行解码
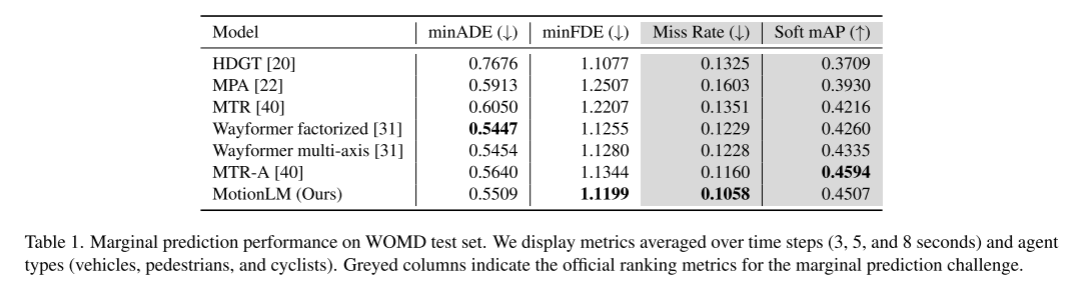
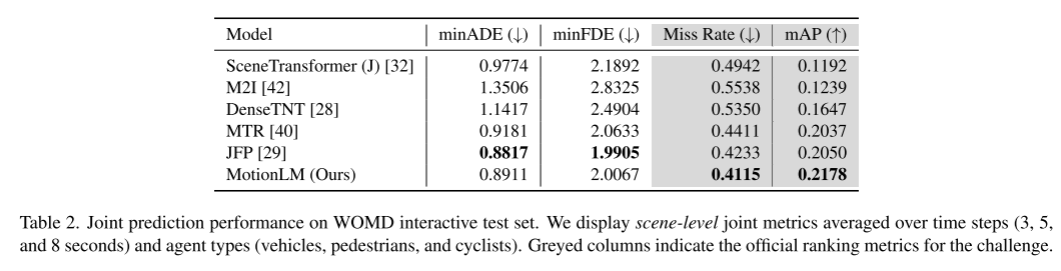
本文将结合模型中的采样和简单的 rollout 聚合方案,以提高联合轨迹的加权模式识别能力。我们通过在 Waymo Open Motion Dataset 交互预测挑战中的实验,证明了这一新的方法在排名联合 mAP 指标上提高了6%,达到了最先进的性能水平
本文对本文的方法进行了广泛的消融实验,并对它的时间因果条件预测进行了分析,这在很大程度上是目前的联合预测模型所不支持的。
本文的目标是以一种通用的方式对多智能体交互上的分布建模,这种分布可以应用于不同的下游任务,包括最低限度的、联合的和条件预测。为了实现这一目标,需要一个有表现力的生成框架,能够捕捉到驾驶场景中的多种形态。此外,本文在这里考虑保存时间依赖性;即,在本文的模型中,推理遵循一个有向无环图,每个节点的父节点在时间上较早,子节点在时间上较晚,这使得条件预测更接近于因果干预,因为它消除了某些虚假的相关性,否则就会导致不服从时间因果关系。本文观察到,不保留时间依赖关系的联合模型可能在预测实际agent反应方面的能力有限,这是规划中的一个关键用途。为此,本文利用了未来解码器的自回归分解,其中代理的运动tokens有条件地依赖于所有先前采样的tokens,并且轨迹按顺序推出
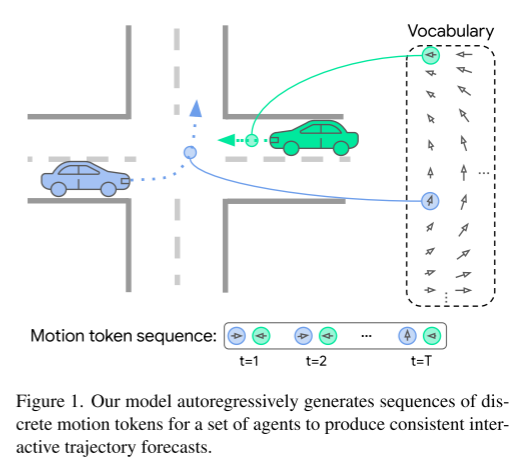
图1。本文的模型自回归地为一组代理生成离散运动tokens序列,以产生一致的交互式轨迹预测。
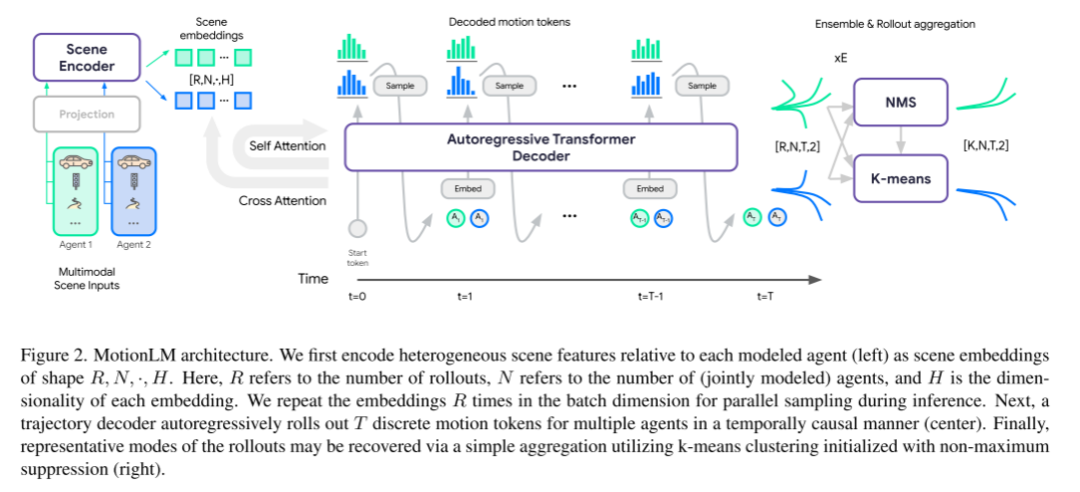
请看图2,这是MotionLM的架构
本文首先将与每个建模代理相关的异构场景特征(左)编码为形状R、N、·、H的场景嵌入。其中,R为首次推出(rollouts)的数量,N为联合建模的代理数量,H为每次嵌入的维数。在推理过程中,为了并行采样,本文在批量维度上重复嵌入R次。接下来,一个轨迹解码器以一种时间因果的方式(中心)为多个代理推出(rolls out) T 个离散运动tokens。最后,通过使用非最大抑制初始化的k-means聚类的简单聚合,可以恢复 rollouts 典型模式(右图)。
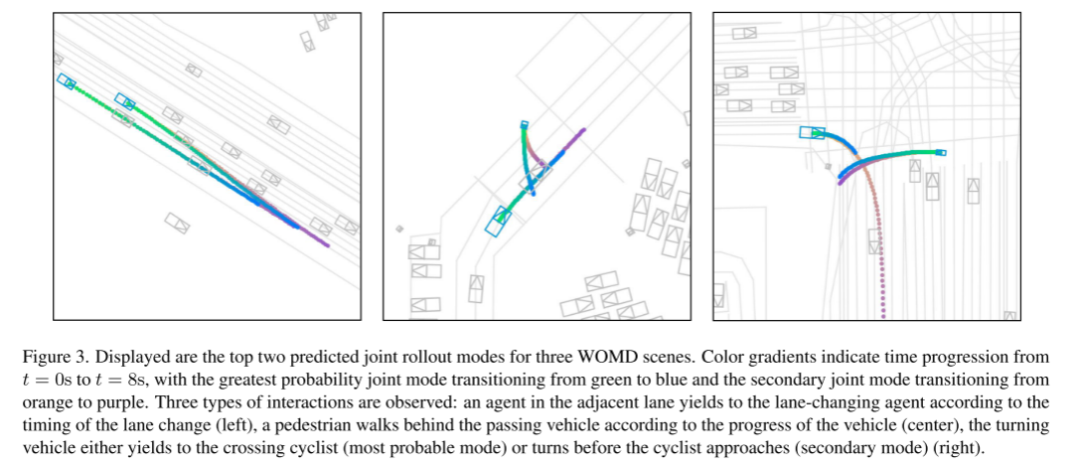
图3。展示了三个WOMD场景的前两种预测联合推出(joint rollout)模式。
颜色梯度表示了从t = 0秒到t = 8秒的时间变化。联合模式由绿色过渡到蓝色,次联合模式由橙色过渡到紫色的概率最大。我们观察到了三种类型的交互:相邻车道中的智能体会根据变道时间给予变道智能体让行(左侧),行人会根据车辆的进度走在过往车辆后面(中间),转弯车辆要么会给过路的骑车人让路(最可能的模式),要么会在骑车人接近之前转弯(次要模式)(右侧)
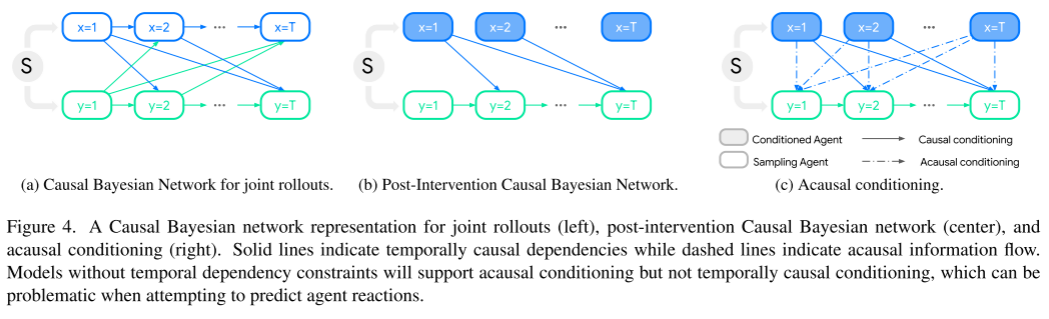
请看图4。这张图展示了联合推出(左侧)、干预后因果贝叶斯网络(中间)和因果条件反射(右侧)的因果贝叶斯网络表示
实线表示时间上的因果相关性,而虚线表示因果信息流。没有时间依赖约束的模型将支持因果条件作用,但不支持时间因果条件作用,这在试图预测agent反应时可能是有问题的。

Seff, A., Cera, B., Chen, D., Ng, M., Zhou, A., Nayakanti, N., Refaat, K. S., & Sapp, B. (2023). MotionLM: Multi-Agent Motion Forecasting as Language Modeling. ArXiv. /abs/2309.16534

原文链接:https://mp.weixin.qq.com/s/MTai0rA8PeNFuj7UjCfd6A
以上是MotionLM:多智能体运动预测的语言建模技术的详细内容。更多信息请关注PHP中文网其他相关文章!





















