

通用足式机器人公司的LimX Dynamics公司正式发布了他们的首款全自研产品「四轮足机器人W1」。这款产品是基于逐际动力公司的「运动智能Motion Intelligence」开发的,它搭载了全球顶尖的感知和运动控制算法,将腿式和轮式结构的优势融合在一起。同时,它还配备了多款全自研的高性能关节,实现了强大的实时地形感知和全地形移动能力,大大提高了足式机器人的作业能力。通过这款四轮足机器人W1,逐际动力公司瞄准了中国潜力巨大的空白市场,并抓住了先机,为工业巡检、物流配送、特种作业、科研教育等B端客户带来了直击痛点的应用体验。逐际动力W1将于今年第四季度开始接受预订

逐际动力发布首款四轮足机器人W1
W1四轮足机器人具备颠覆性的技术和产品能力
针对通用足式机器人,逐际动力全自研高性能关节,让W1得以把四腿和四轮相结合的复合能力发挥到极致,实现了高动态运动与全地形越障能力,比单纯的四足机器人更加高效、敏捷,更适用于大部分的落地应用场景。
搭载逐际动力基于感知的运动控制等核心算法,W1成功攻克了楼梯等难度极高的离散地形,能够覆盖绝大多数非轮式的复杂场景,是中国首个基于自主地形感知,通过实时步态规划与控制,完成上下楼梯的四轮足产品。
得益于天生的形态优势和一流的软硬件能力,W1具备了出色的移动效率、负载能力和续航里程,真正满足客户现实的使用要求。

W1是一款具备出色运动能力的四轮足机器人
目前,逐际动力四轮足机器人W1已成功通过多个复杂应用场景的能力验证,为落地应用做好充分的准备。
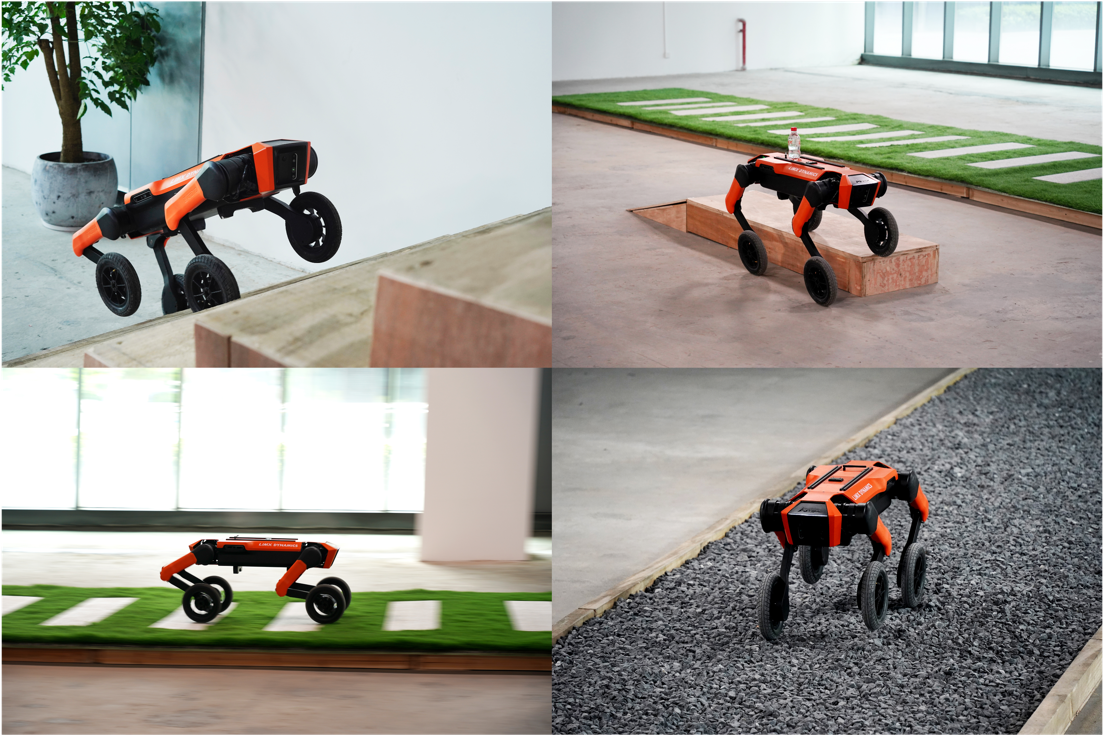
W1四轮足机器人在多个复杂应用场景中成功通过能力验证
四轮足机器人需要具备几乎与四足机器人相同的能力,但是轮足混合带来的感知干扰、状态估计和运动控制的挑战却成倍增加,全球尚无成熟的解决方案,难度极大。为了充分发挥轮足这一复合形态的优势,必须解决学术界和产业界长期面临的难题
逐际动力全方位掌握足式机器人运动智能的核心技术,利用在地形感知、强化学习、多刚体动力学、混杂动力学、模型预测控制等领域的学术和研发经验,建立领先的感知与控制融合的算法框架,实现更高稳定性、更强实时性的控制能力。
要实现从样机到产品的飞跃,做好机器人与环境的实时交互尤为关键,逐际动力从创立之初便把感知能力与运动控制的结合作为核心技术进行攻关,并根据软件算法定义硬件,全自研高性能关节,让四轮足机器人优异的物理运动能力得以充分发挥。
逐际动力创始人张巍博士表示:“通用足式机器人正处于技术爆发期,基础研究与商业化的交集已经出现,并不断扩大,我们在恰当的时机,选择四轮足机器人W1作为首款主打产品,打造具有全地形移动能力的高效通用底盘。这是一款破冰的产品,锚定了接下来技术、应用和市场最佳的交集点,通过一流的技术,让长期困扰很多足式机器人落地的难题得以解决,让足式机器人真正走进产业,创造价值。”
以上是「逐际动力」发布首款四轮足机器人,以运动智能突破足式产品的落地和应用的详细内容。更多信息请关注PHP中文网其他相关文章!


































