

普林斯顿大学、斯坦福大学和谷歌的一组研究人员,利用 OpenAI 的 GPT-3 Davinci 模型,研发出了一款能听懂英语指令并执行家务的机器人,名为 TidyBot。这款机器人可以根据用户的喜好,自动完成如分类洗衣服、捡起地上的垃圾、收拾玩具等任务。
GPT-3 Davinci 模型是一种深度学习模型,属于 GPT 模型系列的一部分,可以理解和生成自然语言。该模型具有强大的总结能力,可以从大量的文本数据中学习复杂的对象属性和关系。研究人员利用这种能力,让机器人根据用户提供的几个示例对象放置位置,如“黄色衬衫放在抽屉里,深紫色衬衫放在衣柜里,白色袜子放在抽屉里”,然后让模型总结出用户的一般偏好规则,并应用到未来的交互中。
研究人员在论文中写道:“我们的基本见解是,LLM(大型语言模型)的总结能力与个性化机器人的泛化需求非常匹配。LLM 展示了通过总结实现泛化的惊人能力,利用从海量文本数据集中学习到的复杂对象属性和关系。”
他们还写道:“与需要昂贵的数据收集和模型训练的传统方法不同,我们展示了 LLM 可以直接开箱即用地实现机器人领域的泛化,利用它们从海量文本数据中学习到的强大的总结能力。”
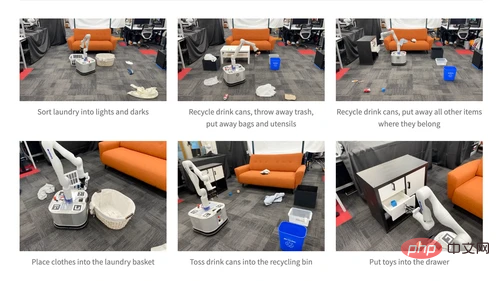
研究人员在论文网站上展示了一个机器人,它能够将洗衣服分为浅色和深色,回收饮料罐,扔掉垃圾,收拾包和餐具,将散落的物品放回原处,并将玩具放入抽屉。
研究人员首先测试了一个基于文本的基准数据集,其中输入了用户偏好,并要求模型创建个性化规则来确定物品归属。模型将示例总结为一般规则,并使用总结来确定新物品的放置位置。基准场景定义在四个房间中,每个房间有 24 个场景。每个场景包含两到五个放置物品的地方,并且有相同数量的已见和未见物品供模型分类。他们写道,这个测试在未见物品上达到了 91.2% 的准确率。
当他们将这种方法应用到真实世界的机器人 TidyBot 时,他们发现它能够成功地收拾 85% 的物体。TidyBot 在八个真实场景中进行了测试,每个场景有一组十个物品,并在每个场景中运行机器人 3 次。据IT之家了解,除了 LLM,TidyBot 还使用了一个叫做 CLIP 的图像分类器和一个叫做 OWL-ViT 的物体检测器。
佐治亚理工学院交互计算学院的助理教授徐丹飞(Danfei Xu)在谈到谷歌的 PaLM-E 模型时表示,LLM 使机器人具有更多的问题解决能力。“以前的任务规划系统大多依赖于一些形式的搜索或优化算法,这些算法不太灵活,也很难构建。LLM 和多模态 LLM 使这些系统能够从互联网规模的数据中受益,并轻松地用于解决新问题。”他说。
以上是研究人员研发出能听懂英语指令并执行家务的机器人的详细内容。更多信息请关注PHP中文网其他相关文章!





















