

隨著基於BEV transformer 任務的興起,隨之帶來的是對資料的依賴變的越來越重,基於BEV 任務的標註也變得越來越重要。目前來看無論是2D-3D的聯合障礙物標註,還是基於重建點雲的clip 的車道線或者Occpuancy 任務標註都還是太貴了(和2D標註任務相比,貴了很多)。當然業界裡面也有很多基於大模型等的半自動化,或是自動化標註的研究。還有一方面是自動駕駛的數據收集,週期太過於漫長,還牽涉到數據合規能一連串問題。例如,你想採集一個平板車跨相機的場景,或是一個車道線城市多變少,少變多的場景,就需要採集人員專項去建造這樣的場景。
世界模型這個概念涵蓋範圍廣泛,可以被視為感測器模擬。在特斯拉AI日上,我第一次目睹模擬技術對資料標註的顛覆性影響。
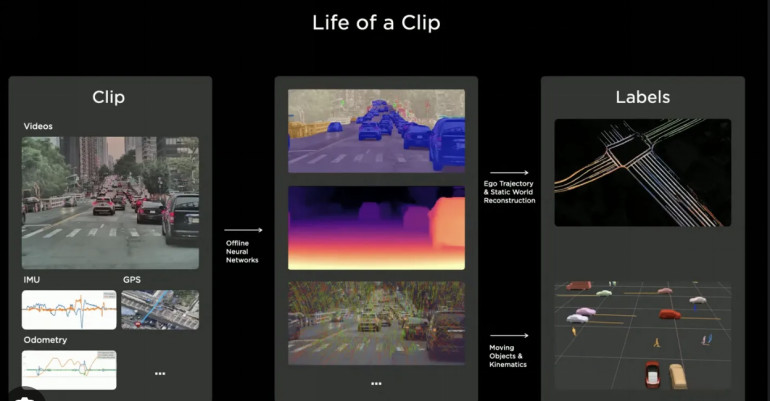
圖1: 特斯拉的自動化標註效果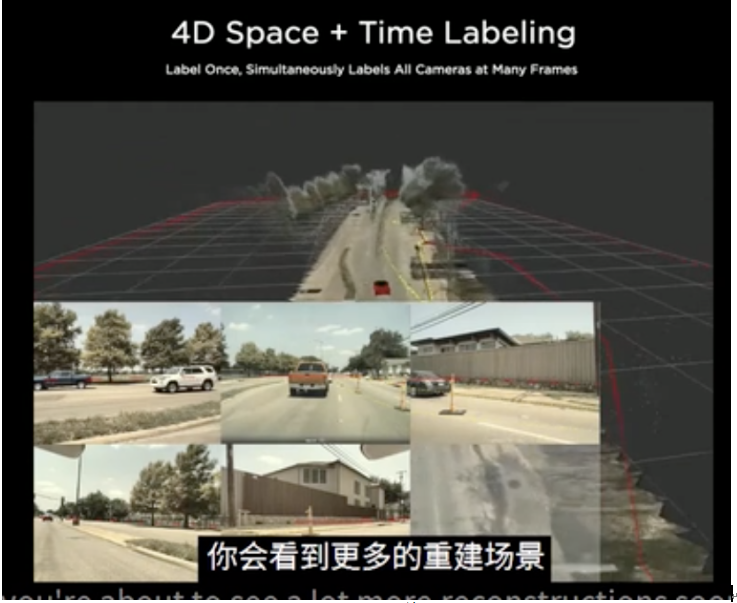 圖二4D 重建的效果
圖二4D 重建的效果
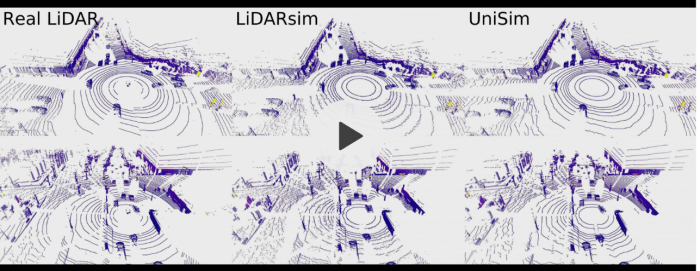
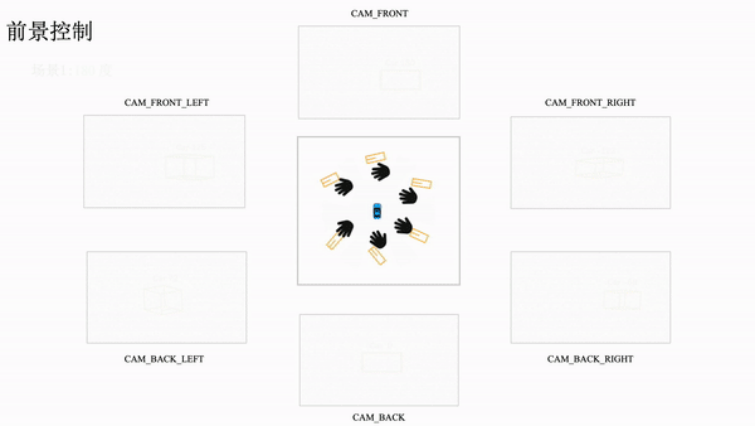
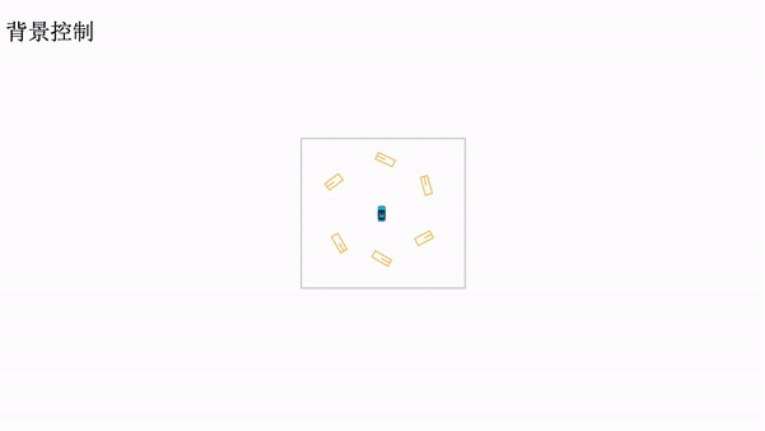
當我第一次看到這個訊息時,感到非常驚訝,簡直像是發現了一款顛覆傳統的特斯拉電動車一樣。隨著越來越多的研究人員投入這個領域,我們看到了許多出色的研究成果。 UniSim的自動駕駛模擬系統具備了重播、動態物件行為控制、自由視角渲染等功能,這些功能對於每個正在訓練的模型研究者來說都是非常令人嚮往的。

也可以對lidar 進行模擬。
具體見: https://zhuanlan.zhihu.com/p/636695025. 這個方向還有更多的類似的研究。
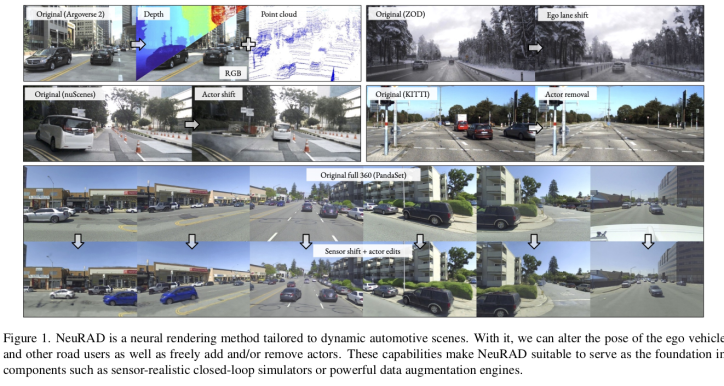
NeuRAD: Neural Rendering for Autonomous Driving
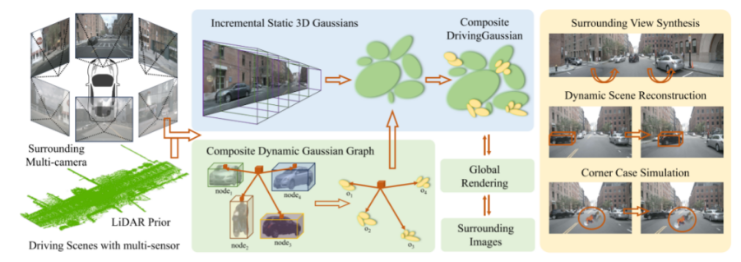
DrivingGaussian: Composite Gaussian Splatting for Surrounding Dynamic Autonomous Driving Scenes 以上的方法大多和Nerf 相關,整個pipeline 都比較重。還有另一個方向,基於擴散的研究方向。目前也取得了不錯的研究。
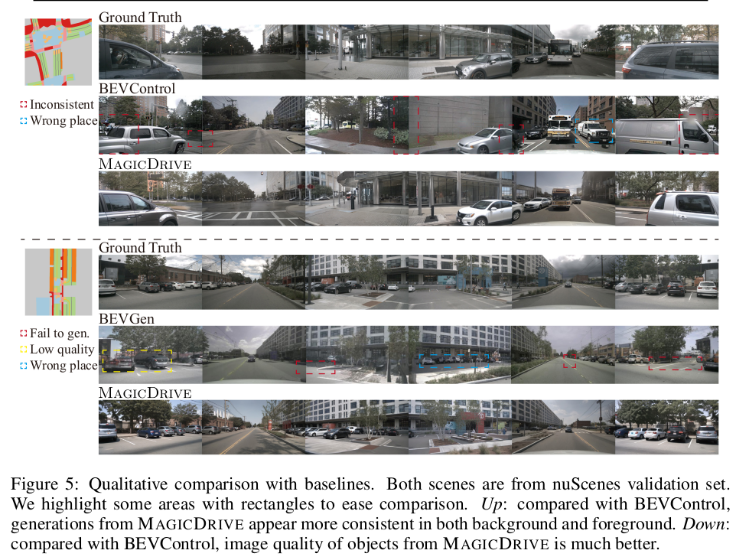
BEVControl: Accurately Controlling Street-view Elements withMulti-perspective Consistency via BEV Sketch Layout
BEVControl: Accurately Controlling Street-view Elements withMulti-perspective Consistency via BEV Sketch Layout
.發展太快了,感測器模擬的門檻正在降低,有可能24年自動駕駛標註產業會出現一些顛覆性的產品出來!
以上是2024年自動駕駛標註產業是否會被世界模式所顛覆?的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















