

根據OpenHarmony官方公眾號訊息,樂聚旗下的"誇父"機器人今日宣布透過OpenHarmony 3.2 Release版本的兼容性測評
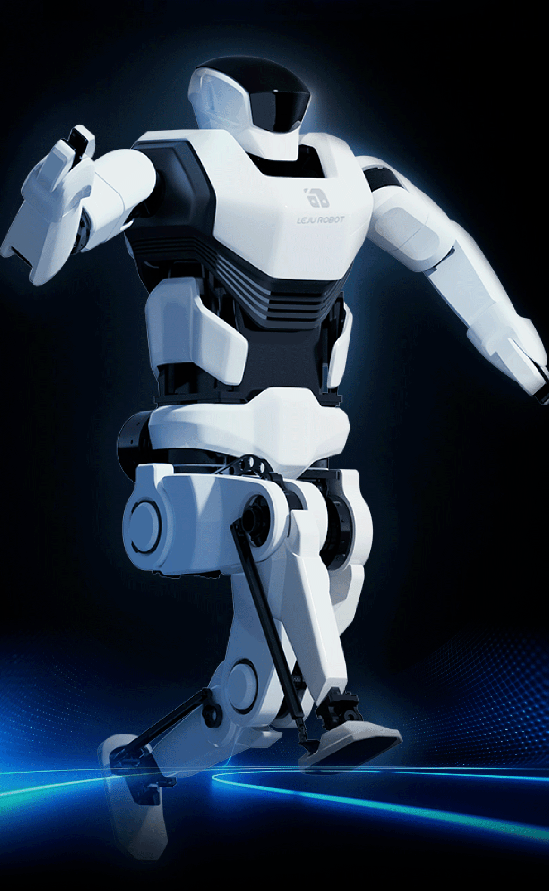
據報道,誇父機器人是由深圳開鴻聯合樂聚機器人技術有限公司(簡稱“樂聚”)共同開發的,被稱為是“國內首款具備跳躍和適應多種地形行走能力的開源鴻蒙人形機器人”
▲ 圖片來源 樂聚官網(下同)
IT之家從訊息中了解到,該機器人搭載了深開鴻基於開源鴻蒙研發的KaihongOS作業系統,採用了全端開源設計,並且運動控制器完全開源。該機器人可以連接軌跡規劃、反饋控制、狀態估計等模組,而且其步態演算法聲稱可以適應各種地形,包括沙地、草地和障礙物等,並且可以跳躍高度達到20厘米
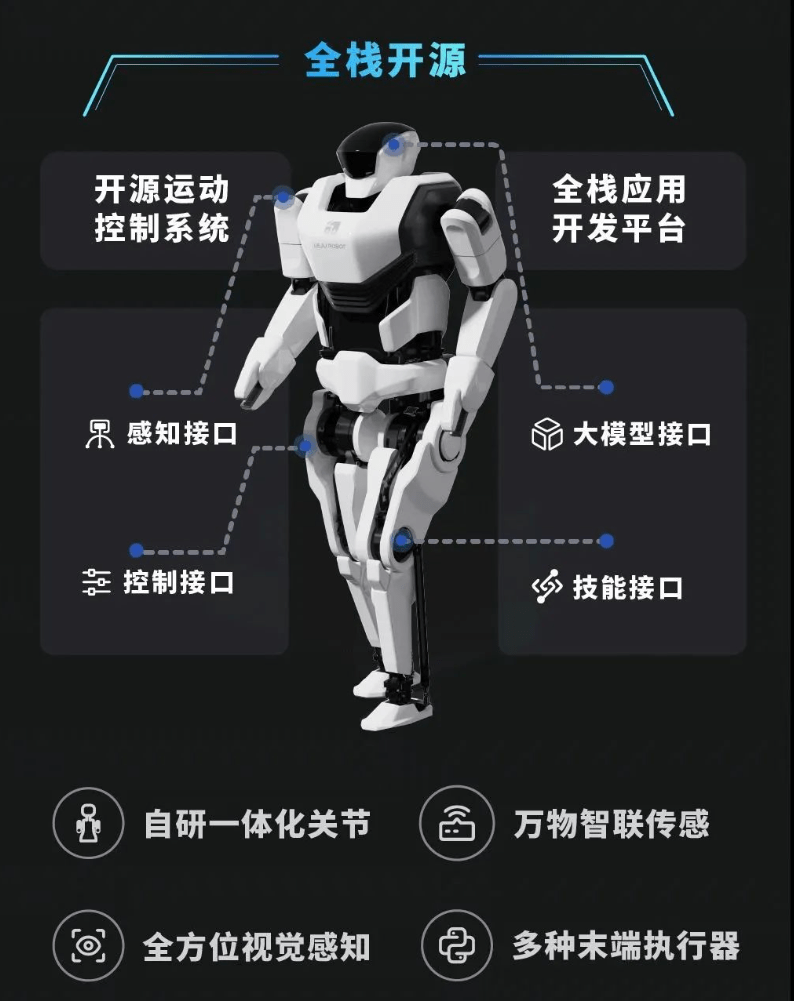
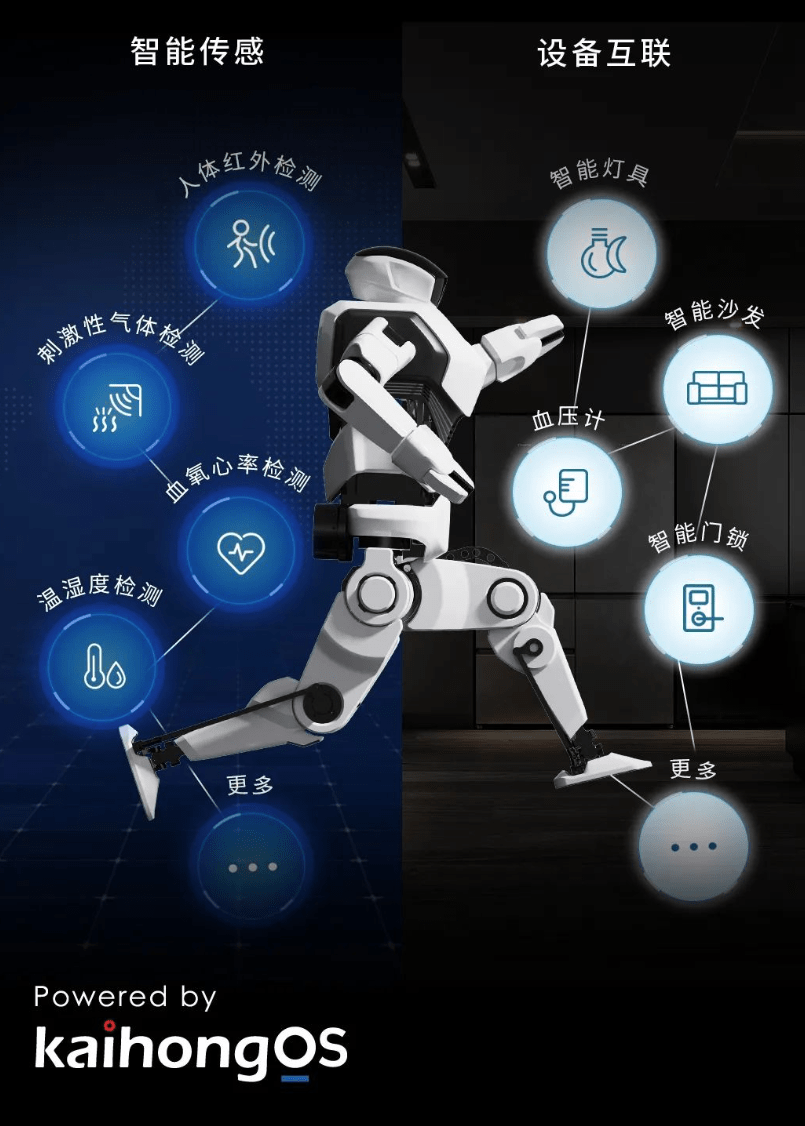
在感知方面,這款機器人可以搭載各種不同的開鴻感測器,並且配備了深度攝影機。它還可以搭配多種末端配件進行二次開發,並且可以與主流大模型進行對接
以上是樂聚人形機器人「誇父」透過 OpenHarmony 3.2 相容性驗證的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















