

不同等級階段的車輛,需要採集的資料量也呈現幾何級成長。以目前常見的L3階段為例,隨著4K超高清攝影機、128線雷射雷達等感測器引入,每天8小時資料擷取系統所記錄的資料量高達30TB。這麼說吧,英偉達公司的自動駕駛技術測試也顯示車輛學習資料收集系統在幾小時內就能夠充滿TB級的固態儲存硬碟(SSD)。

眾所周知,汽車自動化分為五級。自動化程度越高,所需的資料儲存量就越大。舉個例子,例如二級自動駕駛汽車需要全程人為操作,但有附加的自動化系統,如變換車道輔助、盲點偵測或自動停車功能。鮑曼認為,二級自動駕駛汽車需要4到10PB的數據。

然而,三級自動駕駛汽車需要50到100PB的數據存儲,五級自動駕駛汽車則需要3EB以上的存儲空間。鮑曼說:「三級自動駕駛系統意味著汽車可以實現自動駕駛。而五級自動駕駛汽車可以實現完全自動駕駛」「。
儘管自動駕駛汽車所需的資料儲存量是巨大的,但挑戰並非源自於儲存階段,而是傳輸階段。鮑曼說,例如,讓車輛上路去記錄來自當攝影機、雷射掃描器和雷達的資料時,每輛車每天能產生80TB的資料。
他說:「然後,你必須透過數據線連接車輛,將資料從汽車系統傳輸到資料中心,接著將資料從研發中心複製到資料中心。通常,我們的客戶在每個洲都有一個集中的資料庫,資料傳輸就可以透過加速檔案傳輸方法或物理方式實現」。
介紹一些資料管理的具體研究:
#由於邊緣節點能夠為一定範圍內的多個使用者(車輛)同時提供服務,因此資源調配以及用戶任務競爭問題是影響性能的主要因素。某文獻將車輛任務卸載過程中的競爭衝突問題轉化為多用戶博弈問題,證明該問題的納許均衡的存在性,並實現了一個分佈式的計算卸載演算法。
更進一步的上述文獻,針對任務卸載過程中的通訊速率、可靠性、延遲三方面進行最佳化分析,提出了一個支援服務品質感知的無線網路資源管理框架,將資源分配問題拆分為車輛集群的分塊、集群之間的資源塊池分配、集群內的資源分配3個子問題,並實現了一個基於圖理論的優化方法:
針對車輛高移動性導致的邊緣節點頻繁切換的問題,上述文獻認為車輛與節點之間的連接在維持較短時間後便遺失,將造成處理時間及能耗開銷增長,提出了任務接替演算法,按照計算出的接替時間,將處理任務從原有節點卸載至下一個可行的目標節點,繼續任務的運行。
同時,該研究者沒有局限於單一完整的任務卸載,實現了一系列任務的部分卸載策略。
對於整個卸載過程而言,車端的性能與邊緣服務節點端的性能均需要認真對待。DDORV演算法能夠根據當前系統狀況(例如通道品質、流量負載)對車端與節點端的兩個相互耦合且包含大量狀態資訊、控制變數的隨機最佳化問題同時進行考慮。#
具體而言,該演算法基於Lyapunov演算法將雙邊隨機優化問題解耦為兩個獨立的按幀優化問題:對於車輛,卸載策略透過比較本地處理成本與任務卸載成本進行選擇,CPU調整頻率透過提出的目標函數計算得出;對於邊緣節點端,首先提出一個輕量的資源供給演算法,之後基於對無線資源與能耗的共同優化的迭代式演算法,提出持續鬆弛方法以及Lagrange雙解耦算法。
同時,研究者選用電視機空白頻段(TV white space)進行車輛與邊緣節點之間的無線數據傳輸,彌補了傳統蜂窩、Wi-Fi等技術的弊端,提高了通訊效率。
同時,對於一定區域內的多個用戶,通常具有多個節點提供選擇。 JSCO演算法將多節點、多用戶背景下的負載平衡與任務卸載決策問題轉化為混合整數非線性規劃問題,並且能夠針對節點選擇、計算資源最佳化、卸載方案決策3個問題以低複雜度進行計算,在保證延遲限制的條件下最大化系統利用率。
#有專業人士表示,5G對於自動駕駛汽車的研發和生產至關重要,尤其是在未來5到10年,屆時將有更多的技術整合到汽車中。他說:「如今的汽車就是路上的移動資料中心。因此,必須對車輛中的資料進行預處理,例如,識別值得透過5G傳輸到資料中心的有價值的資料」 。
他也說,自動駕駛汽車需要儲存邊緣數據,也就是在車內儲存資料。 「你需要計算邊緣存儲,特別是在沒有5G覆蓋的地方。這是另一個問題,因為你必須在車輛中緩存數據,以便在有5G信號後發送數據」。
與5G相關的另一個問題是上傳速度。有專業人士說:「5G是為高速下載串流數據設計的,所以上傳速度沒有那麼快。因此,你不可能真正透過5G上傳大量數據,它是為從數據中心向最終用戶傳輸數據而不是從車輛到資料中心而設計的。但5G的優勢在於其低延遲」。
網路信函辦公室在去年5月12日發布的《汽車資料安全管理若干規定(徵求意見稿) 》(簡稱《意見稿》)在引起了一陣小波動後,似乎很快就沉入“潭底”,被跨界造車等汽車界的熱鬧事給掩蓋了。但汽車企業心裡很清楚,這不僅是特斯拉爭議帶來的資料安全風控方案,更深層次,採集用戶資料的「緊箍咒」預警已經拉響。 「如果這個法規最終落地時,嚴格規定數據只能留在車內,而車企不啟動新的合法的數據獲取通道,那國內的自動駕駛技術發展,可能真的要延緩幾年,」某位不願透露姓名的業內權威人士稱。
但並非所有車企都選擇靜觀其變,使用者在真實道路上的行駛資料是車企自動駕駛技術迭代升級和完善的重要支援。為此,已有企業開始打造資料取得的新商業模式。今年4月,上汽智己基於其CSOP(Cus-tomerShareOptionPlan)用戶資料權益平台,發布了用戶數位資產「原石」的開採方式。其希望透過該平台,實現與用戶之間的數據交易。具體的操作辦法為:智己汽車拿出4.9%的創始輪股權用於CSOP計劃,並推出3億枚“原石”,其中70%的原石需要車主透過日常駕駛車輛產生數據來兌換獲得。用戶取得原石後,則可以進行軟硬體的產品升級以及相對應的資料權益。
智己是目前國內唯一一家提出與用戶進行數據交易的車企,雖然其平台推出的時間在新規意見稿發布之前,但這被認為有望成為法規趨嚴下的一種解決方案。 「我覺得挺有意思,是一種模式創新。」百度阿波羅資安負責人劉健皓對經濟觀察報記者表示。上述權威人士也認為該模式具有突破性。在此之前,車企對車輛大部分數據都是預設收集的,從未實現平等交易。但也有專家認為,由於存在許多不確定性,這種模式可能只是車企網路思維下的一種嘗試,執行順不順利還不好說。

而對智己汽車數據交易模式探討的背後,映射出了車企和業界對於智慧汽車的用戶資料收集將會變得越來越難的危機感。根據《意見稿》,車企對用戶個人資訊和行駛重要數據“預設不採集”,或至少需要每次都獲得用戶的同意。這意味著數據收集的通道存在將被阻斷的可能,這對於當下如火如荼的自動駕駛應用將不可避免地產生影響。
在這種情況下,上汽智己的資料交易模式是否能成為產業趨勢?在使用者資料安全與智慧駕駛技術發展需求之間,是否有其他可行的資料共享模式?留給整個產業尋找解決方案的時間已經不多了。
在接受《經濟觀察報》記者採訪時,多位專家都對智己汽車與用戶進行數據交易的模式給予了一定肯定。汽車業資深分析師梅松林認為,此模式可加強車企數據採集的透明性,並讓車企與用戶互惠互利。賽迪顧問汽車產業研究中心總經理鹿文亮則表示,顯示車企開始採用類似網路公司「眾包」的模式,具有一定先進性。
但對於該模式是否會成為產業趨勢,業界有不同的看法。 「我覺得未來企業可能還會(像智己一樣)拿出一些好的玩法,來刺激用戶拿出數據。」劉健皓認為,採取這種模式不僅可以幫助車企拿到數據,還可以透過數據的累積大大促進智慧汽車的發展,「數據是行動網路時代的基礎要素,至關重要,智慧汽車也是如此。」劉健皓表示。劉健皓用手機產業的發展作了一個類比,「(以前)諾基亞本身沒什麼數據,隨著智慧型手機應用內容增多,直接迎來了一個行動網路時代。」劉健皓說。
但也有觀點認為,資料交易的模式仍有許多不確定性。一方面,由於是新的模式,數據交易和獎勵的額度比較難設置,「設置低了沒人參與,設置高了後面沒法兌現,會對品牌有損害。」鹿文亮說。同時,針對數據可能推進智慧汽車整體發展的看法,鹿文亮認為,利用「眾包」模式實現發展,首先應該是產品已經比較好,才能利用用戶的數據形成良性循環,半成品的情況下則會造成惡性循環,而當前智慧汽車還不能說已經發展完善,因此以智己汽車為代表的這種數據獲取新模式是否會成為趨勢還不好說,「很可能只是車企在互聯網思維下的一次嘗試。互聯網的營運模式很多,都嘗試一下,不行可以換。」
汽車資料安全管理新規徵求意見稿的發布,讓車企在資料收集方面變得越來越焦慮。 「現在車企對最新的數據採集要求都比較頭疼,對這個徵求意見稿,企業的反饋大部分集中在數據採集方式的改變上。」鹿文亮對經濟觀察報記者指出,如果該新規實施,必將會帶來不小的影響,「主要是以前資料收集得太多了,很多公司的商業模式就是未經授權進行資料收集。」
可以看到,汽車資料安全管理新規主要限制了兩類資料的收集—重要資料和個人資訊。其中重要數據包含“道路上車輛類型、車輛流量等數據”,而這被認為屬於自動駕駛對道路場景收集所需的重要數據。另外,個人資訊中的個人車內操作,也被認為是車企收集使用者習慣的重要管道。但新規卻認定對這些資訊“預設不收集”,即使採集,授權也“僅一次有效”,這可能將阻斷當前車企的資料收集通道。
華為正式發表《華為核心網自動駕駛網路白皮書》,在業界率先提出了面向5G的核心網自動駕駛網路的理念、目標和架構,為5G核心網向自動駕駛網路演進提供了一條可衡量、可實踐的指導性路徑。
近年來,智慧駕駛汽車已成為汽車領域發展的新趨勢,越來越多的汽車採用了輔助駕駛系統(ADAS)和自動駕駛系統,這類系統利用車載的移動資料中心( MDC)和車載感測器,在行駛過程中智慧化探測障礙物、感知周圍環境並自動決策車輛的路徑並控制車輛的行駛狀態。智慧駕駛技術為汽車領域帶來了革命性地機會和挑戰,越來越多的廠商致力於透過智慧駕駛提升駕駛員在汽車行駛中的體驗。
除此之外,智慧駕駛汽車的安全性也引起了業界的廣泛關注,傳統人工駕駛汽車通常利用黑盒子設備記錄車輛在發生事故前後的引擎速度、車速、煞車、油門和安全帶的狀態,而黑盒子則是一類安裝在汽車上且抗損毀性能高的設備。當汽車發生劇烈碰撞時,黑盒子可以透過車身內與黑盒子設備連接的加速感測器提供的數據判斷車輛的加速度在短時間內是否超過預設閾值,進而收集並儲存車身數據。
但是,與傳統的人工駕駛車輛相比,智慧駕駛汽車在應用場景、駕駛員駕駛習慣和方式、智慧駕駛汽車內各個系統的工作方式以及與周圍設施和汽車的關係等方面都發生了巨大的變化,智慧駕駛汽車在安全方面也對黑盒子資料的管理方法提出了更高的要求,因此,如何提供一種適用於智慧駕駛汽車中更有效的黑盒子管理方法成為需要解決的技術問題。
為了解決這樣的問題,華為在19年8月7日申請了一項名為「智慧駕駛汽車中黑盒子資料的管理方法、裝置和設備」的發明專利(申請號碼:201910726567.X),申請人為華為技術有限公司。
根據該專利目前公開的資料,讓我們一起來看看這項黑盒子資料管理方法。
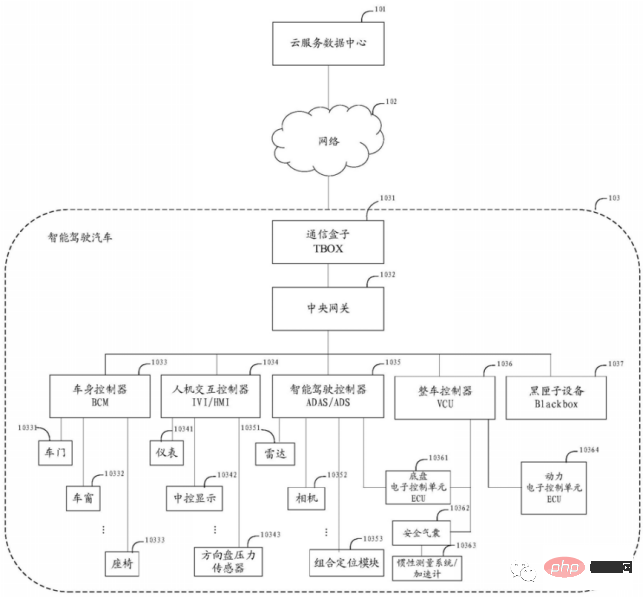
如上圖,為該專利發明的智慧駕駛車的黑盒子資料的管理系統的邏輯架構示意圖,該系統包括雲端資料中心101 、網路102和智慧駕駛103,雲端資料中心101和智慧駕駛103透過網路102進行通訊。
其中,雲端服務資料中心能夠提供用於儲存黑盒子資料的雲端服務的資料中心,包括私有雲、公有雲和混合雲類型的資料中心;網路是可以實現將智慧駕駛車中黑盒子資料傳送至雲端服務資料中心的媒介。
縱觀整個智慧駕駛車輛,其包括有通訊盒1031、中央網關1032、車身控制器(BCM)1033、人機互動控制器1034、智慧駕駛控制器1035 、整車控制器1036和黑盒子設備1037。通訊盒子用於實現智慧駕駛和雲端服務資料中心的通訊;人機互動控制器包括車載娛樂(IVI)和硬體監視器介面(HMI)等車載娛樂控制系統,負責人和車輛的交互,通常用於管理儀表、中控顯示以及方向盤壓力感測器等設備。
整車控制器(VCU)通常與底盤電子控制單元、安全氣囊和動力電子控制單元相連,而安全氣囊通常與慣性測量單元相連,透過慣性測量單元的檢測,可以判斷智慧駕駛汽車是否處於緊急煞車狀態,若智慧駕駛汽車處於該狀態,則安全氣囊可以彈出以保護駕駛安全。
最後就是整輛車中最神秘的黑盒子,黑盒子設備用於在緊急情況下記錄智慧駕駛車的車身數據,這些數據包括:引擎速度、車輛速度、煞車力度、轉向角、油門板狀態、安全帶狀態等,以及這些資料產生時的時間戳記。在汽車失事時,這些數據往往是調查人員分析事故最主要的數據。
接下來,我們結合下圖詳細介紹專利中所提供的智慧駕駛汽車中黑盒子資料的管理方法,如圖所示。
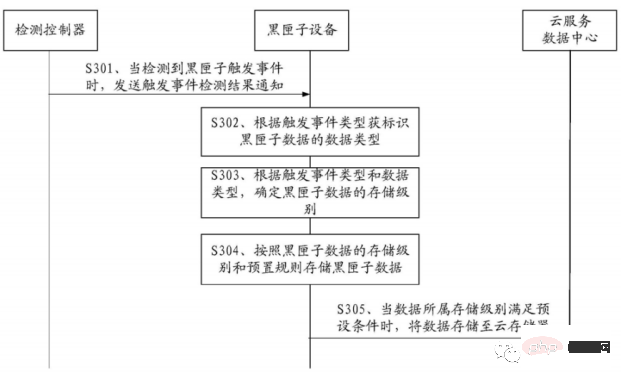
首先,當偵測控制器偵測到黑盒子觸發事件時,偵測控制器會向黑盒子裝置發送觸發事件通知。其次,黑盒子設備根據觸發事件類型來識別黑盒子資料的資料類型,偵測控制器能夠偵測的黑盒子觸發事件包括駕駛模式轉換事件和駕駛風險邊界事件兩類,其中,駕駛模式轉換事件又可以細分為以下兩種情況:
1)駕駛將智慧駕駛汽車的駕駛模式切換至智慧駕駛模式:當智慧駕駛為人工駕駛且智慧駕駛系統偵測符合智慧駕駛開啟條件,透過人機互動控制器通知駕駛者,由駕駛者透過按鈕觸發智慧駕駛切換為智慧駕駛模式,此時,由人機互動控制器通知黑盒子裝置存在黑盒子觸發事件。
2)駕駛者主動將智慧駕駛汽車的駕駛模式切換至非智慧駕駛模式:當智慧駕駛為智慧駕駛模式時,駕駛可以透過踩煞車、轉動方向盤、人機互動控制器模式切換的方式主動將智慧駕駛切換為非駕駛模式,此時,可以透過人機互動控制器偵測到黑盒子資料觸發事件,並通知黑盒子裝置存在黑盒子觸發事件。
接著,黑盒子裝置根據觸發事件類型和資料類型確定資料所屬儲存級別,並依照資料所屬儲存層級和預置規則儲存資料。當資料所屬儲存層級滿足預設條件時,黑盒子裝置將向雲端服務資料中心發送黑盒子資料。這樣,透過對於資料的儲存方式進行分級,最高級會將書就保存到雲端,從而保證了資料的安全性以及有效性。
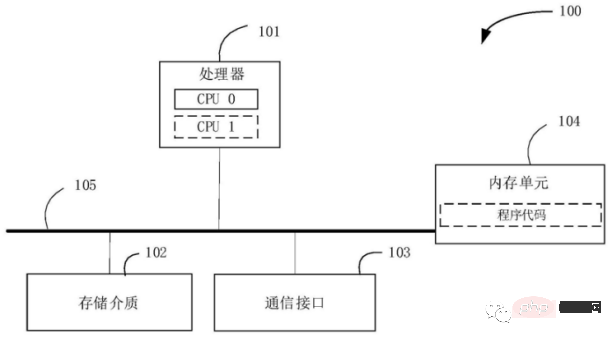
最後是這款智慧型駕駛車的黑盒子裝置的結構示意圖,可以看到,黑盒子裝置包括處理器101、儲存媒體102、通訊介面103和記憶體單元104。其中,處理器、儲存媒體、通訊介面、記憶體單元透過匯流排進行通訊。
以上就是華為發明的黑盒子資料管理方法,透過對於黑盒子中資料的管理方式進行升級、以及將黑盒子的資料同時儲存在本地和雲端記憶體中,並且對於黑盒子的數據進行分級存儲,從而有效的提升了智慧駕駛汽車中黑匣子數據的有效性以及安全性,同時也提升了整個智慧駕駛汽車的整體安全性。
以上是解析自動駕駛技術中的大數據管理的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















