

1、將擷取的彩色車牌影像轉換成灰階圖
2、灰階化的影像利用高斯平滑處理後,再對其進行中直濾波
3、使用Sobel算子對影像進行邊緣偵測
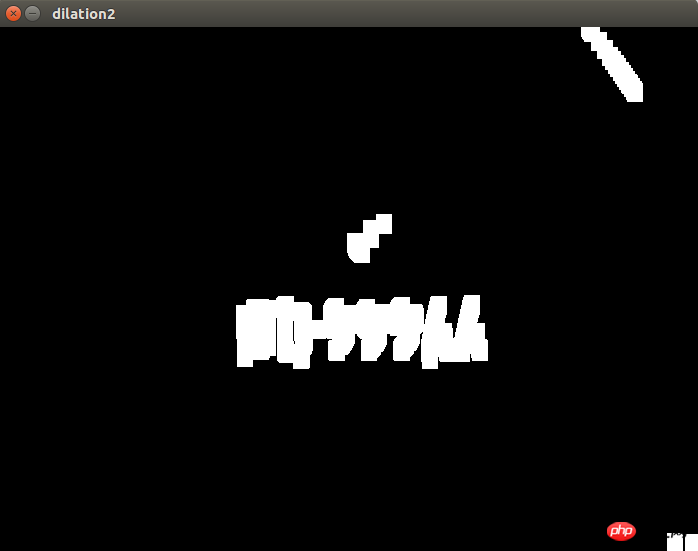
4、對二值化的影像進行腐蝕,膨脹,開運算,閉運算的形態學組合變換
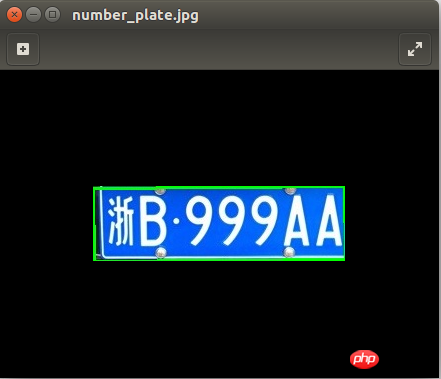
5、對形態學變換後的影像進行輪廓查找,根據車牌的長寬比提取車牌
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gaussian = cv2.GaussianBlur(gray, (3, 3), 0, 0, cv2.BORDER_DEFAULT) median = cv2.medianBlur(gaussian, 5)


sobel = cv2.Sobel(median, cv2.CV_8U, 1, 0, ksize = 3)

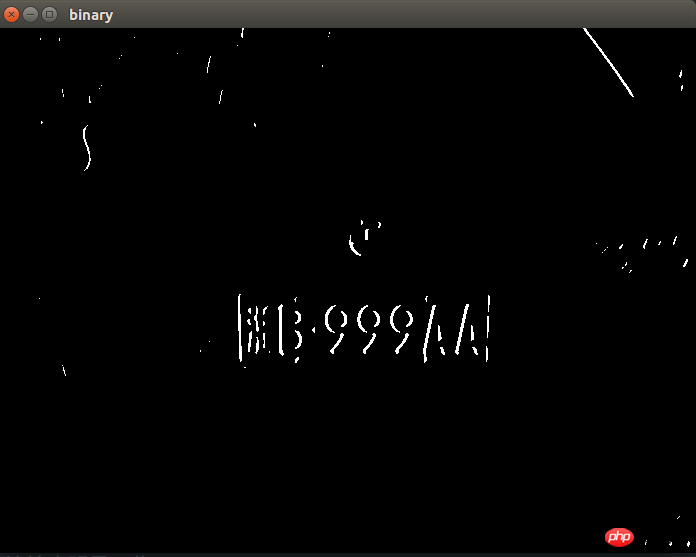

#二值化
ret, binary = cv2.threshold(sobel, 170, 255, cv2.THRESH_BINARY)
# 膨胀和腐蚀操作的核函数 element1 = cv2.getStructuringElement(cv2.MORPH_RECT, (9, 1)) element2 = cv2.getStructuringElement(cv2.MORPH_RECT, (8, 6)) # 膨胀一次,让轮廓突出 dilation = cv2.dilate(binary, element2, iterations = 1) # 腐蚀一次,去掉细节 erosion = cv2.erode(dilation, element1, iterations = 1) # 再次膨胀,让轮廓明显一些 dilation2 = cv2.dilate(erosion, element2,iterations = 3)
def findPlateNumberRegion(img):
region = []
# 查找轮廓
contours,hierarchy = cv2.findContours(img, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 筛选面积小的
for i in range(len(contours)):
cnt = contours[i]
# 计算该轮廓的面积
area = cv2.contourArea(cnt)
# 面积小的都筛选掉
if (area < 2000):
continue
# 轮廓近似,作用很小
epsilon = 0.001 * cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
# 找到最小的矩形,该矩形可能有方向
rect = cv2.minAreaRect(cnt)
print "rect is: "
print rect
# box是四个点的坐标
box = cv2.cv.BoxPoints(rect)
box = np.int0(box)
# 计算高和宽
height = abs(box[0][1] - box[2][1])
width = abs(box[0][0] - box[2][0])
# 车牌正常情况下长高比在2.7-5之间
ratio =float(width) / float(height)
if (ratio > 5 or ratio < 2):
continue
region.append(box)
return region# 用绿线画出这些找到的轮廓 for box in region: cv2.drawContours(img, [box], 0, (0, 255, 0), 2) ys = [box[0, 1], box[1, 1], box[2, 1], box[3, 1]] xs = [box[0, 0], box[1, 0], box[2, 0], box[3, 0]] ys_sorted_index = np.argsort(ys) xs_sorted_index = np.argsort(xs) x1 = box[xs_sorted_index[0], 0] x2 = box[xs_sorted_index[3], 0] y1 = box[ys_sorted_index[0], 1] y2 = box[ys_sorted_index[3], 1] img_org2 = img.copy() img_plate = img_org2[y1:y2, x1:x2]
以上是Python實現車牌定位及分割的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















