


Anggaran pose objek memainkan peranan penting dalam banyak aplikasi praktikal, seperti dalam bidang seperti kecerdasan yang terkandung, operasi robot dan realiti tambahan.
Dalam medan ini, tugas yang mula-mula menarik perhatian ialah Anggaran pose 6D peringkat contoh, yang memerlukan data beranotasi tentang objek sasaran untuk latihan model, menjadikan objek model dalam khusus dan tidak dapat dipindahkan ke objek baharu. atasan. Kemudian, tumpuan penyelidikan bertukar secara beransur-ansur kepada anggaran pose 6D peringkat kategori, yang digunakan untuk memproses objek ghaib, tetapi memerlukan objek itu tergolong dalam kategori minat yang diketahui.
Dan Anggaran pose 6D tangkapan sifar ialah tetapan tugas yang lebih umum, diberikan model CAD bagi mana-mana objek, bertujuan untuk mengesan objek sasaran dalam adegan dan menganggarkan pose 6Dnya. Walaupun kepentingannya, tetapan tugasan sifar ini menghadapi cabaran yang ketara dalam kedua-dua pengesanan objek dan anggaran pose.

tugas anggaran
Baru-baru ini, pembahagian semua model SAM [1] telah menarik perhatian ramai, dan keupayaan pembahagian sampel sifar yang sangat baik adalah menarik perhatian. SAM mencapai pembahagian ketepatan tinggi melalui pelbagai isyarat, seperti piksel, kotak sempadan, teks dan topeng, dsb., yang turut menyediakan sokongan yang boleh dipercayai untuk tugas anggaran pose objek 6D sampel sifar, yang menunjukkan potensinya yang menjanjikan.
Oleh itu, rangka kerja anggaran pose objek 6D sifar sampel baharu SAM-6D telah dicadangkan oleh penyelidik dari Kepintaran Merentas Dimensi, Universiti China Hong Kong (Shenzhen) dan Universiti Teknologi China Selatan. Penyelidikan ini telah diiktiraf oleh CVPR 2024.
Pautan kertas: https://arxiv.org/pdf/2311.15707.pdf
Pautan kod: https://github.com/JiehongLin/SAM-6D
, untuk mencapai sasaran daripada imej pemandangan RGB-D, di mana, Pengambilan ISM SAM sebagai titik permulaan yang sangat baik, digabungkan dengan skor pemadanan objek yang direka dengan teliti untuk mencapai pembahagian contoh objek arbitrari, PEM menyelesaikan masalah pose objek melalui proses pemadanan set titik dua peringkat tempatan ke tempatan. Gambaran keseluruhan SAM-6D ditunjukkan dalam Rajah 2.
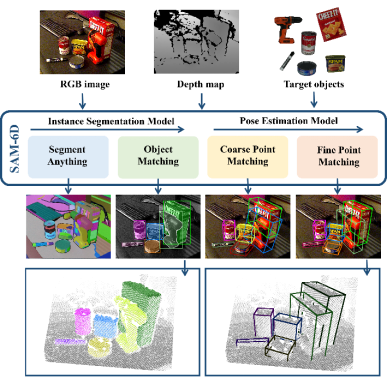
... rangka kerja , dengan diberikan model CAD bagi sebarang objek, ia mencapai pembahagian contoh dan menganggarkan objek sasaran daripada imej RGB-D, dan berprestasi cemerlang pada tujuh set data teras BOP [2]. SAM-6D memanfaatkan keupayaan pembahagian pukulan sifar model Semua Segmen untuk menjana semua calon yang mungkin dan mereka bentuk skor pemadanan objek baharu untuk mengenal pasti calon yang sepadan dengan objek sasaran.
Memandangkan pemandangan berantakan yang diwakili oleh imej RGB, ISM memanfaatkan keupayaan pemindahan tangkapan sifar Model Semua Segmentasi (SAM) untuk menjana semua calon yang mungkin. Bagi setiap objek calon, ISM mengira skor padanan objek untuk menganggar sejauh mana ia sepadan dengan objek sasaran dari segi semantik, rupa dan geometri. Akhir sekali, dengan hanya menetapkan ambang yang sepadan, contoh yang sepadan dengan objek sasaran boleh dikenal pasti.
Istilah padanan semantik - Untuk objek sasaran, ISM memaparkan templat objek daripada pelbagai perspektif dan menggunakan DINOv2 [3] untuk pra-latihan Model ViT mengekstrak ciri semantik objek calon dan templat objek, dan mengira skor korelasi antara mereka. Skor padanan semantik diperoleh dengan purata skor tertinggi K teratas, dan templat objek yang sepadan dengan skor korelasi tertinggi dianggap sebagai templat padanan terbaik.
Padanan rupa - Untuk templat padanan terbaik, model ViT digunakan untuk mengekstrak ciri blok imej dan mengira perkaitan antaranya dan ciri blok objek calon untuk mendapatkan skor padanan penampilan, yang digunakan untuk membezakan persamaan semantik tetapi item yang sepadan dengan penampilan.
Padanan Geometri - Mengambil kira faktor seperti perbezaan bentuk dan saiz objek yang berbeza, ISM turut mereka bentuk skor padanan geometri. Purata putaran yang sepadan dengan templat padanan terbaik dan awan titik objek calon boleh memberikan pose objek kasar, dan kotak sempadan boleh diperolehi dengan mengubah dan menayang model CAD objek menggunakan pose ini secara tegar. Mengira nisbah intersection-over-union (IoU) antara kotak sempadan dan kotak sempadan calon boleh memperoleh skor padanan geometri.
Model Anggaran Pose (PEM)
Untuk setiap objek calon yang sepadan dengan objek sasaran, SAM-6D menggunakan Model Anggaran Pose (PEM) untuk meramalkan pose 6Dnya berbanding model CAD objek. . C mewakili Bilangan saluran ciri. Matlamat PEM adalah untuk mendapatkan matriks tugasan yang mewakili surat-menyurat setempat-ke-tempatan daripada P_m ke P_o disebabkan oleh oklusi, P_o hanya padanan sebahagiannya P_m dan disebabkan oleh ketidaktepatan segmentasi dan hingar penderia, P_m hanya padanan separa DAN padanan. P_o.
Untuk menyelesaikan masalah menetapkan titik tidak bertindih dalam dua set titik, ISM melengkapkannya dengan Token Latar Belakang, yang dilambangkan sebagai  dan
dan  , yang boleh mewujudkan surat-menyurat tempatan-ke-tempatan secara berkesan berdasarkan persamaan ciri. Secara khusus, matriks perhatian boleh dikira terlebih dahulu seperti berikut:
, yang boleh mewujudkan surat-menyurat tempatan-ke-tempatan secara berkesan berdasarkan persamaan ciri. Secara khusus, matriks perhatian boleh dikira terlebih dahulu seperti berikut: 
 Kemudian matriks taburan
Kemudian matriks taburan 

dan
mewakili operasi softmax di sepanjang baris dan lajur masing-masing mewakili pemalar, dan. Nilai setiap baris dalam  (kecuali baris pertama) mewakili kebarangkalian padanan setiap titik P_m dalam set titik P_m dengan latar belakang dan titik tengah P_o Dengan mencari indeks skor maksimum, titik sepadan dengan P_m (termasuk latar belakang) boleh didapati ).
(kecuali baris pertama) mewakili kebarangkalian padanan setiap titik P_m dalam set titik P_m dengan latar belakang dan titik tengah P_o Dengan mencari indeks skor maksimum, titik sepadan dengan P_m (termasuk latar belakang) boleh didapati ).
Setelah  dikira, semua pasangan mata padanan {(P_m,P_o)} dan markah padanan mereka boleh dikumpulkan, dan akhirnya SVD berwajaran digunakan untuk mengira pose objek.
dikira, semua pasangan mata padanan {(P_m,P_o)} dan markah padanan mereka boleh dikumpulkan, dan akhirnya SVD berwajaran digunakan untuk mengira pose objek. 



Menggunakan strategi di atas berdasarkan Token Latar Belakang, dua peringkat padanan set titik direka bentuk dalam PEM Struktur model ditunjukkan dalam Rajah 3, yang merangkumi pengekstrakan ciri, padanan set titik kasar dan padanan set titik halustiga modul.
Modul padanan set titik kasar melaksanakan surat-menyurat jarang untuk mengira pose objek awal, dan kemudian menggunakan pose ini untuk mengubah set titik objek calon untuk mencapai pembelajaran pengekodan kedudukan.
Modul padanan set titik halus menggabungkan pengekodan kedudukan set titik pensampelan objek calon dan objek sasaran, dengan itu menyuntik surat-menyurat kasar pada peringkat pertama dan seterusnya mewujudkan surat-menyurat padat untuk mendapatkan pose objek yang lebih tepat. Untuk mempelajari interaksi padat secara berkesan pada peringkat ini, PEM memperkenalkan pengubah set titik jarang ke padat novel, yang melaksanakan interaksi pada versi jarang ciri padat, dan menggunakan Pengubah Linear [5] untuk mengubah ciri jarang dipertingkatkan kepada Diffusion back. menjadi ciri padat.
Hasil eksperimen
Untuk dua sub-model SAM-6D, model segmentasi instance (ISM) dibina berdasarkan SAM tanpa memerlukan latihan semula rangkaian dan finetune, manakala model anggaran pose (PEM) menggunakan MegaPose [4] menyediakan set data sintetik ShapeNet-Objects dan Google-Scanned-Objects untuk latihan.
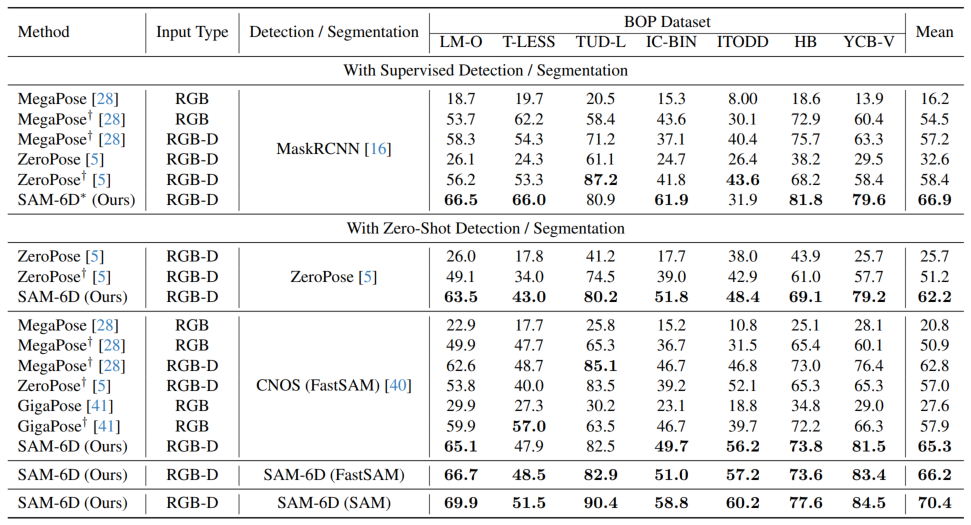
Untuk mengesahkan keupayaan sampel sifarnya, SAM-6D telah diuji pada tujuh set data teras BOP [2], termasuk LM-O, T-LESS, TUD-L, IC-BIN, ITODD, HB dan YCB-V . Jadual 1 dan 2 menunjukkan perbandingan pembahagian contoh dan keputusan anggaran pose kaedah berbeza pada tujuh set data ini, masing-masing. Berbanding dengan kaedah lain, SAM-6D berprestasi sangat baik pada kedua-dua kaedah, menunjukkan sepenuhnya keupayaan generalisasi yang kuat. B Jadual 1. Contoh hasil segmentasi kaedah berbeza pada tujuh set data teras BOP
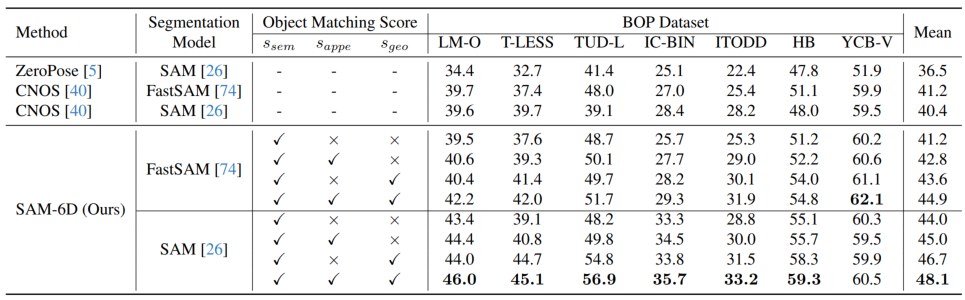
Jadual 2. Kaedah berbeza mengenai sikap kaedah berbeza pada tujuh set data teras BOP Perbandingan keputusan
Untuk butiran pelaksanaan lanjut SAM-6D, dialu-alukan untuk membaca kertas asal.
Rujukan:
[1] Alexander Kirillov et
[2] Martin Sundermeyer et., "Bop challenge 2022 tentang pengesanan, pembahagian dan anggaran pose objek tegar tertentu." Ciri visual yang teguh tanpa pengawasan."[4] Yann Labbe et. al., "Megapose: Anggaran pose 6d objek novel melalui render & compare."
Katharopoulos Angelolos[5] . . al., "Transformer ialah rnns: Autoregresif pantas
transformer dengan perhatian linear."
Atas ialah kandungan terperinci CVPR 2024 |. Rangka kerja anggaran pose objek 6D sifar SAM-6D, selangkah lebih dekat dengan kecerdasan yang terkandung. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 paging mysql
paging mysql
 Apakah kekunci pintasan untuk menukar pengguna?
Apakah kekunci pintasan untuk menukar pengguna?
 Bagaimana untuk menyelesaikan masalah bahawa folder Win10 tidak boleh dipadamkan
Bagaimana untuk menyelesaikan masalah bahawa folder Win10 tidak boleh dipadamkan
 Bagaimana untuk membuka ramdisk
Bagaimana untuk membuka ramdisk
 Perkara yang perlu dilakukan jika alamat IP anda diserang
Perkara yang perlu dilakukan jika alamat IP anda diserang
 Bagaimana untuk memotong gambar panjang pada telefon bimbit Huawei
Bagaimana untuk memotong gambar panjang pada telefon bimbit Huawei
 mybatis cache tahap pertama dan cache tahap kedua
mybatis cache tahap pertama dan cache tahap kedua
 Penggunaan fungsi get dalam bahasa c
Penggunaan fungsi get dalam bahasa c








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



