


Kecerdasan buatan sekali lagi mengalahkan juara dunia manusia, kali ini dalam perlumbaan dron.
Pencapaian besar ini diterbitkan dalam majalah "Nature" dan "Science Robotics" oleh pasukan jurutera dari Universiti Zurich di Switzerland. Selepas perlumbaan pertama menentang dron AI pada 2011, tiada dron autonomi boleh mengalahkan juruterbang manusia sehingga Swift datang. Swift menewaskan pemain manusia juara dunia, termasuk Juara Dunia Drone Racing League 2019 Alex Vanover, Juara Terbuka Antarabangsa MultiGP dua kali Thomas Bitmatta, dan Juara Kebangsaan Switzerland tiga kali Marvin Schaepper
Di alam maya, kecerdasan buatan telah mengalahkan manusia dalam permainan seperti catur, dam, Go dan StarCraft. Kini, buat pertama kalinya, ia juga berjaya mengalahkan manusia dalam cabaran fizikal
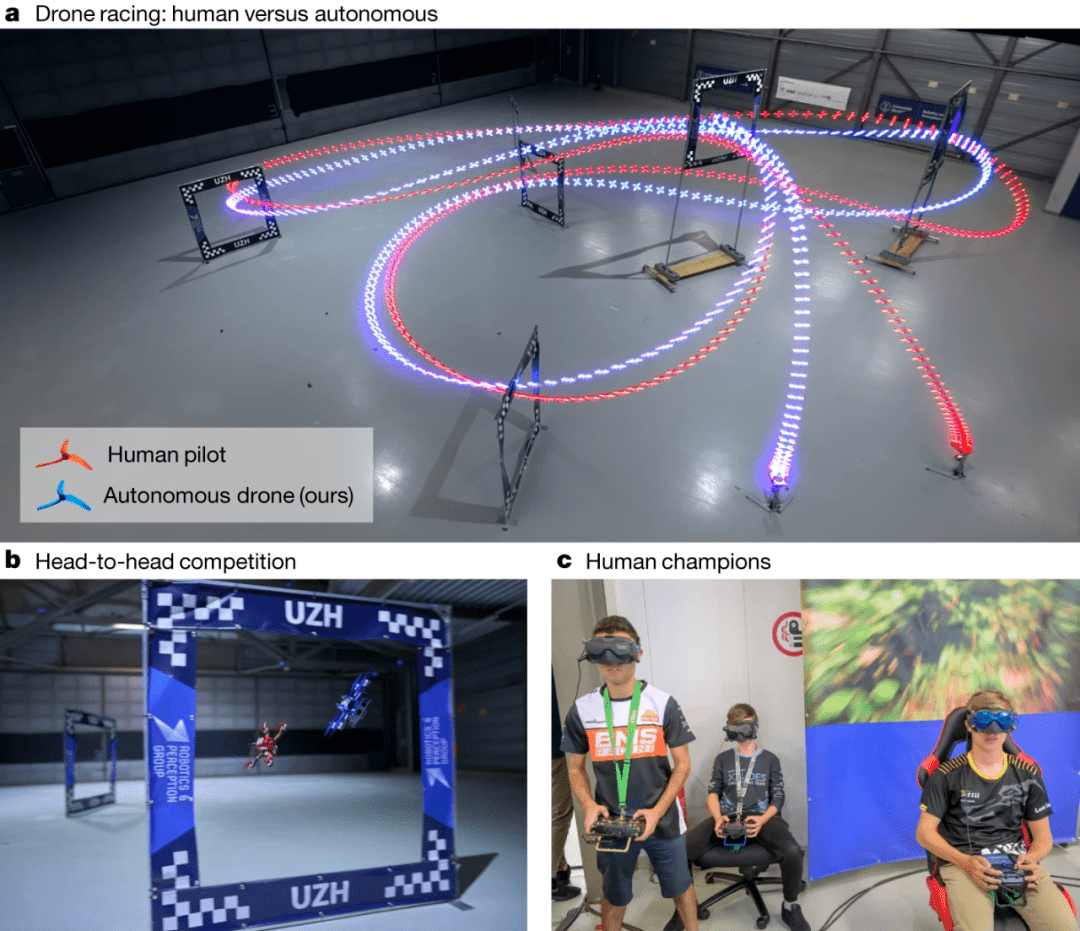
Perenggan ini telah ditulis semula seperti berikut: Permainan ini dikendalikan oleh dron "First Person View" (FPV) yang dilengkapi dengan kamera resolusi tinggi. Satu artikel telah diterbitkan dalam majalah Science Robotics yang memperincikan kemenangan bersejarah yang dicapai oleh pasukan pembangunan dron Swift. Dalam persaingan sengit dengan tiga pesaing dron, dron ini memenangi 15 daripada 25 cabaran. Orang yang bertanggungjawab bagi projek itu berkata, "Hasil kami menandakan kali pertama robot dipacu AI telah mengalahkan manusia dalam acara pengalaman kehidupan sebenar yang direka untuk manusia dan dipimpin oleh manusia

Rahsia kejayaan dron "Swift" terletak pada rangkaian neural buatannya yang berkuasa, yang boleh mengoptimumkan laluan dan kelajuan dron. Ia mengumpul butiran alam sekitar dalam masa nyata melalui kamera atas kapal untuk memberikan panduan tepat untuk dron, manakala juruterbang manusia bergantung pada isyarat video yang dihantar ke fon kepala untuk mengalami "perspektif orang pertama."
Dalam perlumbaan dron ini, pengendali manusia mengawal dron melalui trek 3D melalui kamera onboard. Inovasi sistem Swift ialah keupayaan untuk memetakan status dron kepada arahan untuk melaraskan kadar tujahan dan putaran. Pencapaian ini merupakan satu kejayaan dalam bidang robotik mudah alih dan kecerdasan mesin.

Pengenalan teknologi pantas
Swift ialah quadcopter yang dikawal secara autonomi hanya menggunakan penderia dan pengkomputeran onboard. Pesawat itu terdiri daripada dua modul utama:
Antaranya, strategi kawalan diwakili oleh rangkaian neural suapan dan dilatih menggunakan pembelajaran tetulang mendalam (RL) atas dasar tanpa model
Memandangkan perbezaan dalam penderiaan dan dinamik antara simulasi dan dunia sebenar, mengoptimumkan strategi hanya dalam simulasi akan menghasilkan prestasi sebenar dron yang lebih lemah. Oleh itu, pasukan penyelidik memutuskan untuk menganggarkan model hingar empirikal bukan parametrik menggunakan data yang dikumpul daripada sistem fizikal
Hasil penyelidikan menunjukkan bahawa model hingar empirikal ini memainkan peranan positif dalam berjaya memindahkan strategi kawalan daripada simulasi kepada realiti
Secara khusus, Swift menukar bacaan penderia pada pesawat kepada arahan kawalan Proses penukaran ini merangkumi dua bahagian:
(1) Strategi pemerhatian untuk memperhalusi maklumat visual dan inersia berdimensi tinggi menjadi pengekodan dimensi rendah khusus tugas
(2) Strategi kawalan, tukar pengekodan kepada arahan dron.
Daripada 10 kekalahan yang direkodkan oleh Swift, 40% disebabkan oleh perlanggaran dengan pihak lawan, 40% disebabkan oleh perlanggaran dengan pintu persaingan, dan 20% disebabkan oleh lebih perlahan daripada dron yang dikawal oleh manusia. Secara keseluruhannya, Swift memenangi paling banyak perlumbaan menentang dron dikawal manusia, dan ia juga mencatatkan rekod perlumbaan terpantas, mengalahkan masa terbaik dron dikawal manusia (A. Vanover) sebanyak setengah dozen Second.
Walaupun Swift lebih pantas daripada semua dron yang dikawal manusia secara keseluruhan, ia tidak lebih laju pada setiap segmen trek.
Analisis teliti oleh pasukan penyelidik mendapati bahawa: apabila berlepas, Swift mempunyai masa tindak balas yang lebih pendek dan berlepas 120 milisaat lebih awal daripada juruterbang manusia secara purata Swift juga memecut lebih pantas dan memasuki gerbang pertandingan pertama pada kelajuan yang lebih tinggi. Dalam selekoh yang ketat, pergerakan Swift lebih ketat.
Pasukan penyelidik juga mencadangkan hipotesis bahawa Swift mengoptimumkan trajektori pada skala masa yang lebih lama daripada pengendali manusia. Adalah diketahui bahawa pembelajaran peneguhan tanpa model boleh dicapai dengan mengoptimumkan ganjaran jangka panjang. Sebaliknya, pengendali manusia mempunyai skala masa yang lebih pendek untuk merancang pergerakan dan hanya boleh meramalkan satu pintu persaingan pada masa hadapan
Atas ialah kandungan terperinci Drone Swift menggunakan teknologi AI untuk mengalahkan pemain manusia terkemuka dalam acara FPV. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



