


Parkour ialah sukan lasak Ia merupakan satu cabaran besar untuk robot, terutamanya anjing robot berkaki empat, yang perlu cepat mengatasi pelbagai halangan dalam persekitaran yang kompleks. Sesetengah kajian telah cuba menggunakan data haiwan rujukan atau ganjaran yang kompleks, tetapi pendekatan ini menjana kemahiran parkour yang sama ada pelbagai tetapi buta, atau berasaskan penglihatan tetapi khusus adegan. Walau bagaimanapun, parkour autonomi memerlukan robot untuk mempelajari kemahiran am berasaskan penglihatan dan pelbagai untuk melihat pelbagai senario dan bertindak balas dengan cepat.
Baru-baru ini, video parkour anjing robot menjadi viral Anjing robot dalam video itu dengan pantas mengatasi pelbagai halangan dalam pelbagai senario. Sebagai contoh, melalui celah di bawah plat besi, panjat kotak kayu, dan kemudian lompat ke kotak kayu yang lain Satu siri pergerakan lancar dan lancar:
#🎜🎜. # # 🎜🎜#
# 🎜🎜#

#🎜 Ia juga mempunyai kemahiran istimewa: Mampu memerah melalui celah sempit pada sudut

 #🎜 Jika anjing robot itu gagal melepasi halangan, ia akan mencuba beberapa kali lagi:
#🎜 Jika anjing robot itu gagal melepasi halangan, ia akan mencuba beberapa kali lagi:
Kandungan ini telah ditulis semula ke dalam bahasa Cina: Anjing robot ini berdasarkan rangka kerja pembelajaran kemahiran "parkour" yang dibangunkan untuk robot kos rendah. Rangka kerja itu dicadangkan bersama oleh penyelidik dari Institut Penyelidikan Qizhi Shanghai, Universiti Stanford, Universiti ShanghaiTech, CMU dan Universiti Tsinghua, dan kertas penyelidikannya telah dipilih untuk CoRL 2023 (Lisan). Projek penyelidikan ini telah menjadi sumber terbuka
Alamat kertas: https://arxiv.org/abs/2309.05665 🎜🎜 #
 Alamat projek: https://github.com/ZiwenZhuang/parkour
Alamat projek: https://github.com/ZiwenZhuang/parkour
#🎜hod🎜 Introduction🎜 ## 🎜🎜#
Penyelidikan ini memperkenalkan sistem sumber terbuka baharu untuk mempelajari strategi parkour berasaskan penglihatan hujung ke hujung untuk mempelajari pelbagai kemahiran parkour menggunakan ganjaran mudah tanpa memerlukan Sebarang data pergerakan rujukan.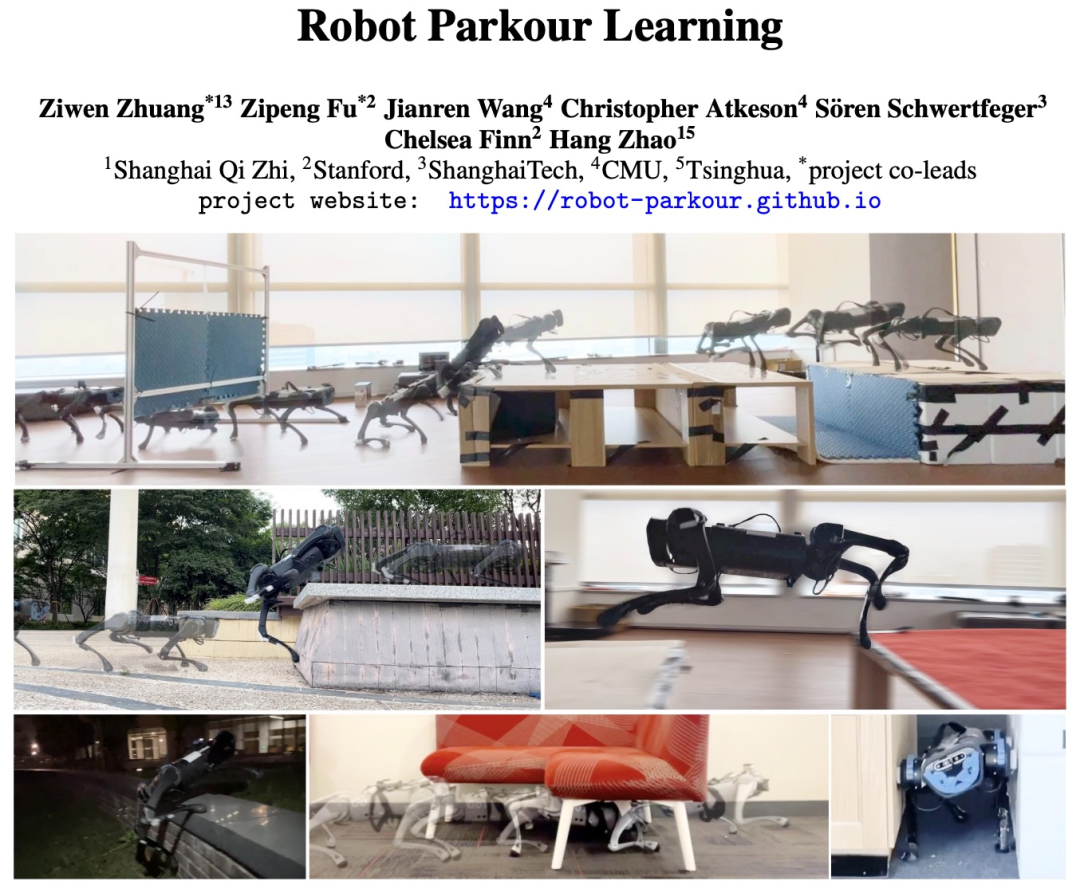
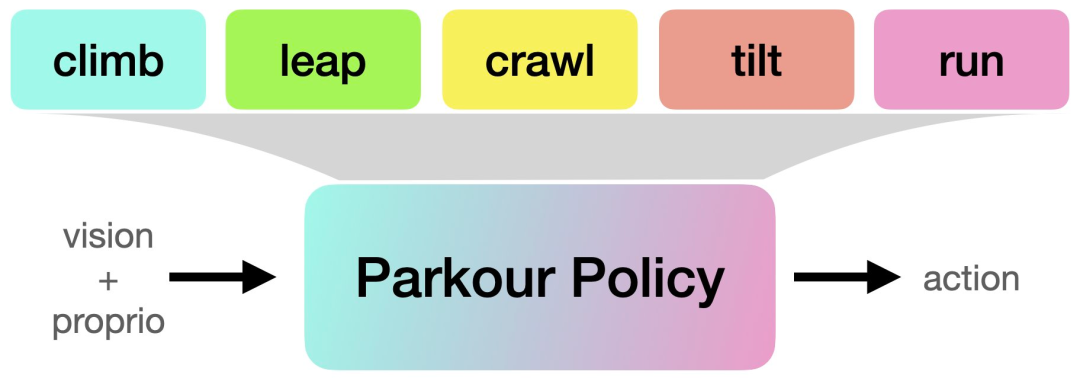
Secara khusus, penyelidikan ini mencadangkan kaedah pembelajaran pengukuhan yang direka untuk membolehkan robot belajar memanjat halangan yang tinggi, melompat melepasi jurang yang besar, dan mengemudi di bawah halangan yang rendah seperti merangkak, merempit melalui celah sempit, dan berlari, dan menukar kemahiran ini menjadi strategi parkour berdasarkan satu penglihatan. Pada masa yang sama, kemahiran ini dipindahkan kepada robot berkaki empat dengan menggunakan kamera kedalaman egosentrik untuk hanya menggunakan pengkomputeran atas kapal (Nvidia Jetson), kamera kedalaman atas kapal (Intel Realsense) dan kuasa atas kapal tanpa memerlukan tangkapan gerakan, lidar, pelbagai kamera kedalaman dan banyak pengkomputeran #🎜🎜 #
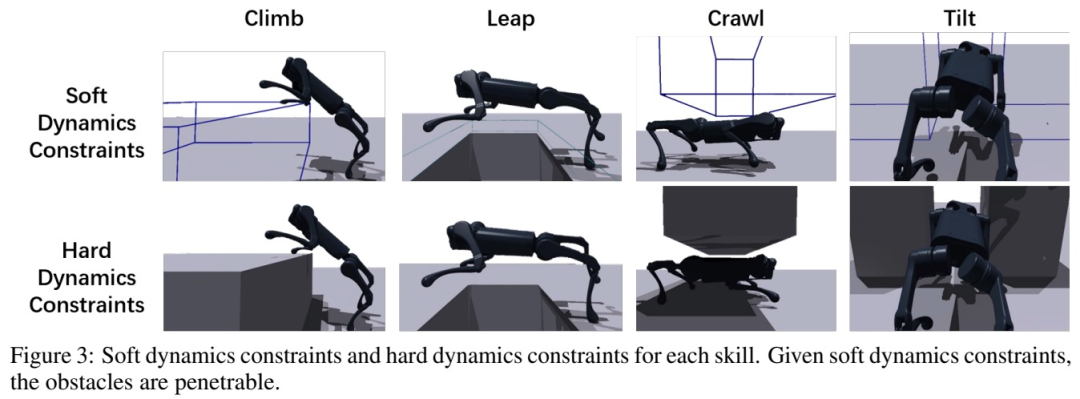
Untuk melatih strategi parkour, penyelidikan menjalankan tiga peringkat kerja berikut:Peringkat pertama: pembelajaran pengukuhan pra-Latihan, dengan kekangan dinamik lembut. Penyelidikan ini menggunakan kursus automatik untuk membolehkan robot belajar merentas halangan, menggalakkan robot belajar secara beransur-ansur untuk mengatasi halangan
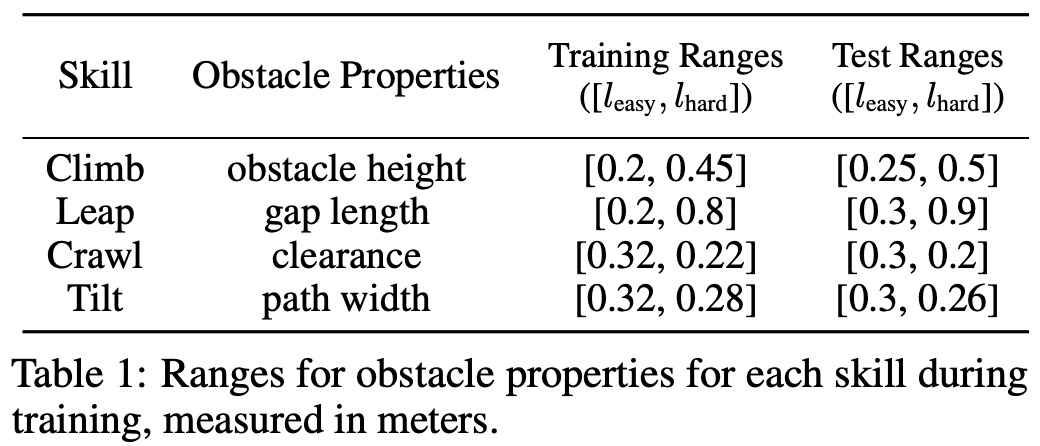
Peringkat ketiga: penyulingan. Selepas mempelajari setiap kemahiran parkour individu, kajian menggunakan DAgger untuk menyaringnya ke dalam dasar parkour berasaskan penglihatan (diparameterkan oleh RNN) yang boleh digunakan pada robot berkaki hanya menggunakan persepsi dan pengiraan atas kapal. Dalam latihan, kajian menetapkan saiz halangan yang sepadan untuk setiap kemahiran, seperti ditunjukkan dalam Jadual 1 di bawah:
Eksperimen dan keputusan
 tion dan nyata -eksperimen kehidupan telah dijalankan, dan keputusan menunjukkan bahawa strategi parkour membolehkan robot berkaki empat kos rendah memilih dan melaksanakan kemahiran parkour yang sesuai untuk melintasi hanya menggunakan pengkomputeran onboard, penderiaan visual onboard dan persekitaran yang mencabar di dunia terbuka, termasuk memanjat halangan sehingga 0.40m (1.53x ketinggian robot), melompat melepasi jurang besar sehingga 0.60m (1.5x panjang robot), dan melompat melepasi halangan serendah 0.2m (0.76x ketinggian robot) Ia boleh merangkak di bawah objek, memerah melalui celah sempit 0.28m (kurang daripada lebar robot) dengan mencondongkan, dan boleh terus berlari ke hadapan.
tion dan nyata -eksperimen kehidupan telah dijalankan, dan keputusan menunjukkan bahawa strategi parkour membolehkan robot berkaki empat kos rendah memilih dan melaksanakan kemahiran parkour yang sesuai untuk melintasi hanya menggunakan pengkomputeran onboard, penderiaan visual onboard dan persekitaran yang mencabar di dunia terbuka, termasuk memanjat halangan sehingga 0.40m (1.53x ketinggian robot), melompat melepasi jurang besar sehingga 0.60m (1.5x panjang robot), dan melompat melepasi halangan serendah 0.2m (0.76x ketinggian robot) Ia boleh merangkak di bawah objek, memerah melalui celah sempit 0.28m (kurang daripada lebar robot) dengan mencondongkan, dan boleh terus berlari ke hadapan. 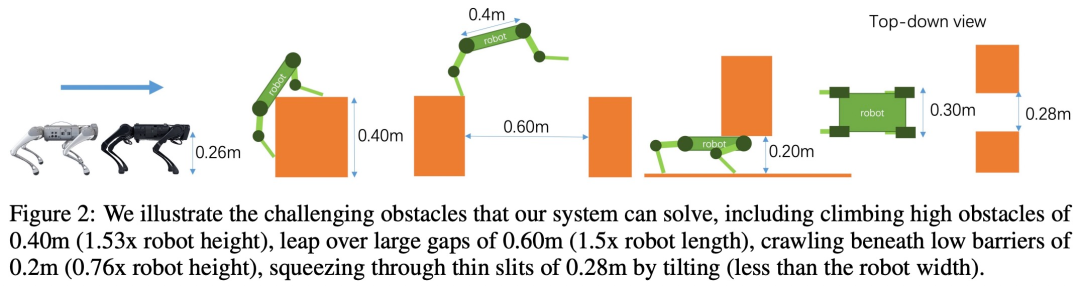
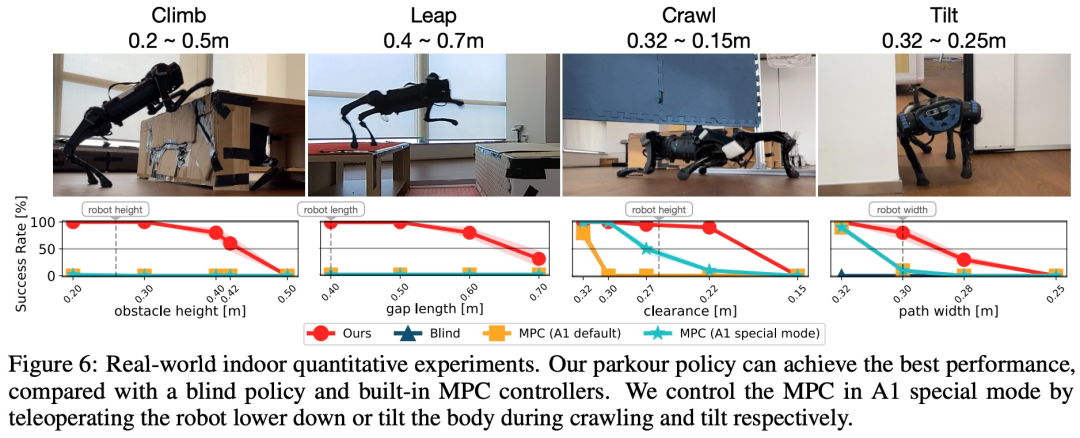 Selain itu, kajian juga membandingkan kaedah yang dicadangkan dengan beberapa kaedah asas dan menjalankan eksperimen ablasi dalam persekitaran simulasi. Keputusan khusus ditunjukkan dalam Jadual 2:
Selain itu, kajian juga membandingkan kaedah yang dicadangkan dengan beberapa kaedah asas dan menjalankan eksperimen ablasi dalam persekitaran simulasi. Keputusan khusus ditunjukkan dalam Jadual 2: 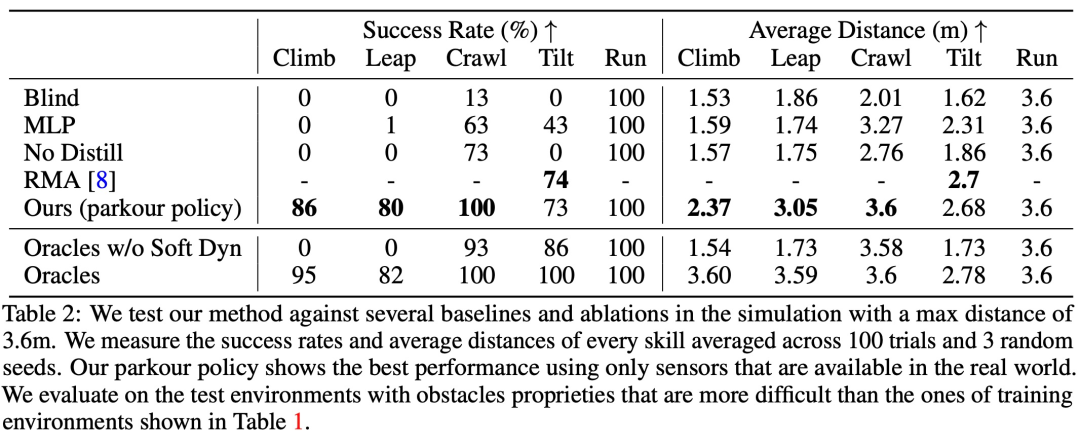 Pembaca yang berminat boleh membaca kertas asal untuk mengetahui lebih lanjut tentang kandungan penyelidikan
Pembaca yang berminat boleh membaca kertas asal untuk mengetahui lebih lanjut tentang kandungan penyelidikan
Atas ialah kandungan terperinci Memanjat, melompat, dan melintasi celah sempit, strategi pembelajaran pengukuhan sumber terbuka membolehkan anjing robot untuk parkour. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Penggunaan fungsi sqrt dalam Java
Penggunaan fungsi sqrt dalam Java
 Bagaimana untuk mengukur kelajuan rangkaian pada komputer
Bagaimana untuk mengukur kelajuan rangkaian pada komputer
 Penyelesaian kepada masalah bahawa input tidak disokong apabila komputer dimulakan
Penyelesaian kepada masalah bahawa input tidak disokong apabila komputer dimulakan
 html editor dalam talian
html editor dalam talian
 Apakah maksud tambah dalam java?
Apakah maksud tambah dalam java?
 Ralat menyambung ke pelayan id apple
Ralat menyambung ke pelayan id apple
 Apakah platform Fengxiangjia?
Apakah platform Fengxiangjia?
 Apakah yang perlu saya lakukan jika eDonkey Search tidak dapat menyambung ke pelayan?
Apakah yang perlu saya lakukan jika eDonkey Search tidak dapat menyambung ke pelayan?








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



