


Menurut media asing Tech Xplore, Institut Max Planck untuk Sistem Pintar (MPI-IS) di Stuttgart, Jerman, mencipta Morti, seekor anjing robot kecil berkaki empat yang boleh menyesuaikan postur berjalannya selepas setiap jatuh berjalan sendiri.
Kertas kerja "Pembelajaran Padanan Plastik Robot Dinamik dalam Penjana Corak Pusat Gelung Tertutup" yang menggambarkan teknologi ini diterbitkan pada 18 Julai dalam " Diterbitkan dalam jurnal Nature Machine Intelligence, pengarang pertama kertas kerja itu ialah Felix Ruppert .
Rupert berkata: "Anjing robot Morti yang kami kaji mempunyai refleks yang sama seperti haiwan dan boleh belajar cara berjalan secara bebas daripada kegagalan." anjing robot
1. Bangun selepas jatuh, Morti boleh meniru haiwan dan belajar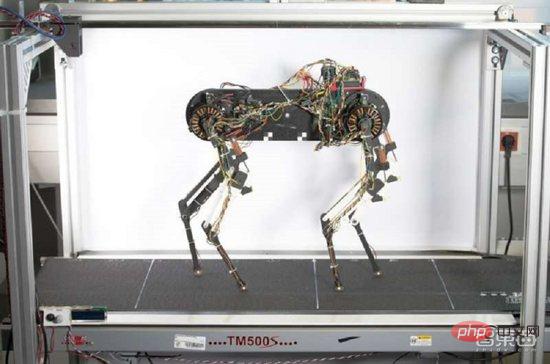
▲Morti mengoptimumkan berjalan berdasarkan data maklum balas
Morti meniru proses haiwan kecil belajar berjalan. Mereka hanya mencari cara yang paling berkesan selepas jatuh secara berterusan. Cara menggunakan otot dan belajar berjalan. Rupert berkata bahawa pada mulanya, Morti akan jatuh, tetapi selepas kira-kira sejam, algoritma itu akan membantu Morti mencari cara terbaik untuk berjalan. Rupert juga berkata: "Pada masa ini pasukan saya menambah lebih banyak penderia pada Morti untuk mengembangkan julat pergerakan Mortimer. Kami mahu menjadikan Morti lebih seperti haiwan 
▲Morti berjalan di atas treadmill
Dhireesha Kudithipudi, seorang profesor di Universiti Texas di San Antonio berkata: "Secara umumnya, kecerdasan buatan boleh belajar tugas tertentu dengan sangat baik, tetapi kecerdasan buatan tidak boleh menentukur semula apabila persekitaran berubah secara autonomi. Morti boleh melaraskan corak pergerakannya sendiri berdasarkan maklum balas data, dan mungkin untuk menentukur semula persekitaran."
Atas ialah kandungan terperinci Bolehkah anjing robot belajar berjalan dalam satu jam? Meniru naluri haiwan, penyelidikan yang diterbitkan dalam sub-jurnal Alam. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Algoritma penggantian halaman
Algoritma penggantian halaman
 Bagaimana untuk menyelesaikan masalah pelayan dns tidak bertindak balas
Bagaimana untuk menyelesaikan masalah pelayan dns tidak bertindak balas
 Bagaimana untuk membuka fail vcf
Bagaimana untuk membuka fail vcf
 Cara menggunakan anotasi notnull
Cara menggunakan anotasi notnull
 Kecacatan maut pelayan bilah
Kecacatan maut pelayan bilah
 Masa paparan foto
Masa paparan foto
 Adakah inskripsi Bitcoin akan hilang?
Adakah inskripsi Bitcoin akan hilang?
 Apakah perbezaan antara paparan pangkalan data dan jadual
Apakah perbezaan antara paparan pangkalan data dan jadual








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



