

오픈하모니 공식 계정에 따르면, 오늘 레쥬의 '쿠아푸' 로봇이 오픈하모니 3.2 릴리스 버전의 호환성 평가를 통과했다고 발표했습니다
보도에 따르면 Kuafu Robot은 Shenzhen Kaihong과 Leju Robot Technology Co., Ltd.(줄여서 "Leju")가 공동 개발했으며 "도약하고 걷기에 적응하는 능력을 갖춘 국내 최초의 오픈 소스 Hongmeng"이라고 불립니다. 다양한 지형" 휴머노이드 로봇"
▲ 사진 출처 레주 공식홈페이지 (아래동일)
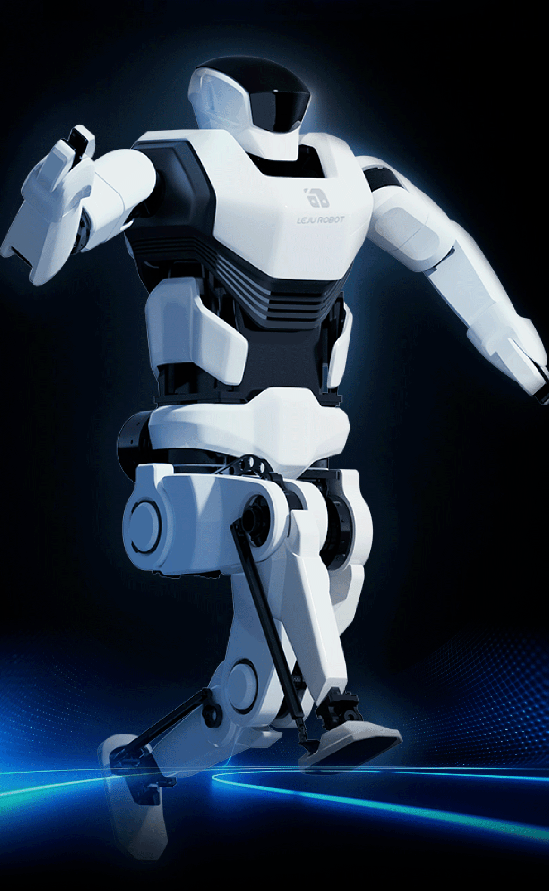
IT Home은 오픈 소스 Hongmeng을 기반으로 Shenzhen Kaihong이 개발한 KaihongOS 운영 체제가 로봇에 탑재되어 있다는 소식을 접했습니다. 이는 풀 스택 오픈 소스 디자인을 채택하고 모션 컨트롤러는 완전히 오픈 소스입니다. 로봇은 궤적 계획, 피드백 제어, 상태 추정 등의 모듈과 연결할 수 있으며, 보행 알고리즘은 모래, 잔디, 장애물 등 다양한 지형에 적응할 수 있으며 최대 20cm까지 점프할 수 있다고 합니다
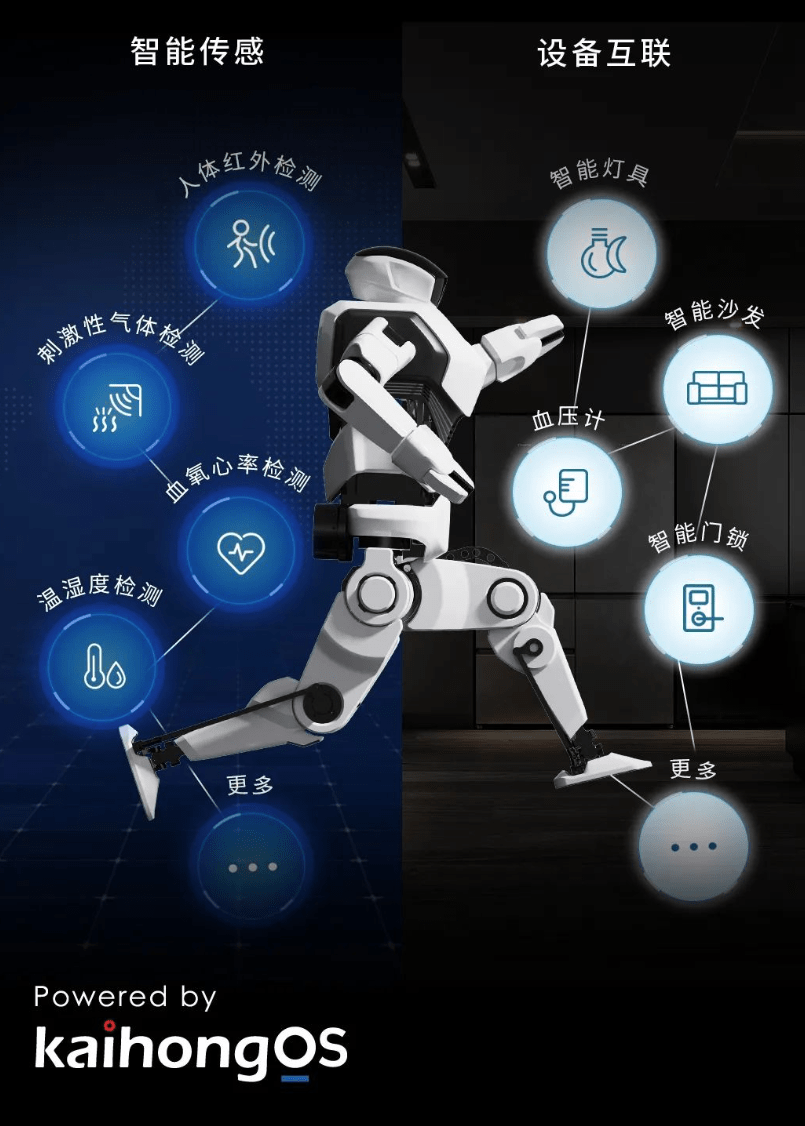
인식 측면에서 이 로봇은 다양한 카이홍 센서를 장착할 수 있으며 깊이 카메라가 장착되어 있습니다. 2차 개발을 위한 다양한 엔드 액세서리와 함께 사용할 수도 있고, 주류 대형 모델과도 연결할 수 있습니다
위 내용은 레주 휴머노이드 로봇 '쿠아푸' 오픈하모니 3.2 호환성 검증 통과의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



