

머신 하트 리포트
편집자: Xiaozhou, Ziwen
두 걸음 가세요. 할 일 없으면 두 걸음 가세요.
로봇 분야에서 Tesla의 휴머노이드 로봇은 항상 많은 관심을 받아왔습니다.
2021년 '테슬라 AI 데이'에서 머스크는 테슬라의 만능 로봇 계획을 발표하고 사진을 활용해 휴머노이드 로봇 테슬라봇의 전체적인 모습을 보여줬다.
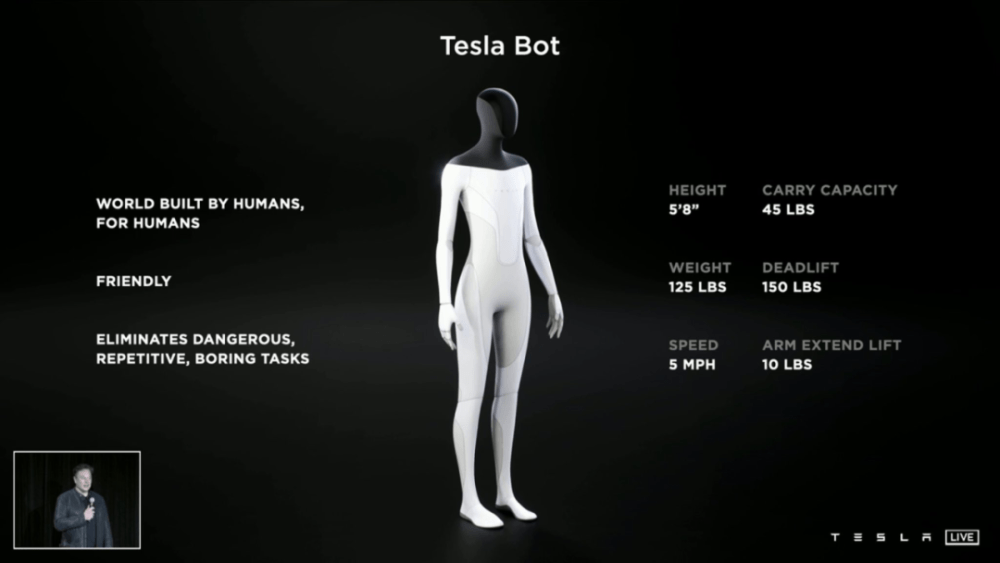
머스크는 2021년 '테슬라 AI 데이'에서 테슬라봇의 전체적인 모습을 선보였습니다.
하지만 당시 테슬라봇은 그저 컨셉일 뿐이었고, 액션 디스플레이 부분은 스태프들이 특수 타이트한 의상을 입고 로봇 흉내를 내며 춤을 추는 것으로 구성됐다. 1년 뒤인 2022년 '테슬라 AI 데이'에서는 휴머노이드 로봇 옵티머스가 실물 모습을 드러낸 뒤 천천히 걸어나와 관객들에게 인사를 건넸다.
옵티머스는 2022년 '테슬라 AI 데이'에서 공개될 예정이다.
데뷔한 옵티머스는 연결이나 백업 없이도 간단한 몇 걸음만 걸을 수 있었습니다. 최근 Tesla 주주총회에서 머스크는 Tesla Bot의 최신 진행 상황을 선보였습니다. 이제 Tesla Bot이 원활하게 걸을 수 있습니다:
여러 로봇이 함께 앞으로 걸어가도록 할 수도 있습니다:
Tesla의 휴머노이드 로봇은 걷기 외에도 물체를 유연하게 잡고 내려놓을 수 있습니다.
콘셉트부터 걷고, 물건을 잡는 기본 능력까지, 지난 2년간 테슬라가 어떤 기술적 발전을 이루었는지 살펴보겠습니다.
기술적 방법
Tesla가 공개한 최신 영상에서 Tesla는 모터 토크 제어, 환경 발견 및 기억, 인간 시연을 기반으로 한 훈련 로봇 등 휴머노이드 로봇의 움직임과 제어를 개선하기 위해 몇 가지 기술적 방법을 사용한 것을 확인할 수 있습니다.
모터 토크 제어
먼저 연구팀은 모터 토크 제어를 사용해 휴머노이드 로봇의 다리 움직임을 제어해 로봇의 '발'을 부드럽게 유지했습니다.

이 영상은 이 제어 방식을 사용하면 로봇의 움직임이 계란도 깨지지 않는다는 것을 보여주며, 이는 로봇의 "걸음이 매우 가볍다"는 것을 보여줍니다:
환경 발견과 기억
로봇에게는 주변 환경을 관찰하거나 인지하는 것이 매우 중요합니다. 테슬라는 휴머노이드 로봇에 환경 발견과 기억 능력을 추가했다. 이제 휴머노이드 로봇은 주변 환경을 대략적으로 모델링할 수 있습니다.

인간의 시연을 바탕으로 로봇을 훈련하세요
테슬라의 휴머노이드 로봇은 인간과 유사한 신체 구조를 가지고 있습니다. Tesla 연구팀은 로봇에게 인간과 같은 물체 파악 능력을 제공하기 위해 광범위한 인간 시연, 특히 손 움직임을 사용하여 로봇을 훈련시켰습니다.
쉽게 잡을 수 있는 물체 표시:
현재 테슬라는 걷기, 물건 잡기 등 휴머노이드 로봇의 기본 기능을 시연해왔습니다. 회사는 로봇에 대한 기술적인 개선을 더욱 강화할 예정이며 가까운 시일 내에 대량 생산에 들어갈 것으로 예상됩니다.
참조 링크:
https://www.theverge.com/2023/5/16/23726139/tesla-robot-update-video-shareholder-meeting
https://www.youtube.com/watch?v=XiQkeWOFwmk
위 내용은 Tesla의 휴머노이드 로봇은 두 단계를 거쳐 물건을 잡을 수 있습니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!






























![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



