

本篇文章主要介绍了详解pytorch批训练及优化器比较,详细的介绍了什么是pytorch批训练和pytorch的optimizer优化器,非常具有实用价值,需要的朋友可以参考下
一、PyTorch批训练
1. 概述
PyTorch提供了一种将数据包装起来进行批训练的工具——DataLoader。使用的时候,只需要将我们的数据首先转换为torch的tensor形式,再转换成torch可以识别的Dataset格式,然后将Dataset放入DataLoader中就可以啦。
import torch
import torch.utils.data as Data
torch.manual_seed(1) # 设定随机数种子
BATCH_SIZE = 5
x = torch.linspace(1, 10, 10)
y = torch.linspace(0.5, 5, 10)
# 将数据转换为torch的dataset格式
torch_dataset = Data.TensorDataset(data_tensor=x, target_tensor=y)
# 将torch_dataset置入Dataloader中
loader = Data.DataLoader(
dataset=torch_dataset,
batch_size=BATCH_SIZE, # 批大小
# 若dataset中的样本数不能被batch_size整除的话,最后剩余多少就使用多少
shuffle=True, # 是否随机打乱顺序
num_workers=2, # 多线程读取数据的线程数
)
for epoch in range(3):
for step, (batch_x, batch_y) in enumerate(loader):
print('Epoch:', epoch, '|Step:', step, '|batch_x:',
batch_x.numpy(), '|batch_y', batch_y.numpy())
'''''
shuffle=True
Epoch: 0 |Step: 0 |batch_x: [ 6. 7. 2. 3. 1.] |batch_y [ 3. 3.5 1. 1.5 0.5]
Epoch: 0 |Step: 1 |batch_x: [ 9. 10. 4. 8. 5.] |batch_y [ 4.5 5. 2. 4. 2.5]
Epoch: 1 |Step: 0 |batch_x: [ 3. 4. 2. 9. 10.] |batch_y [ 1.5 2. 1. 4.5 5. ]
Epoch: 1 |Step: 1 |batch_x: [ 1. 7. 8. 5. 6.] |batch_y [ 0.5 3.5 4. 2.5 3. ]
Epoch: 2 |Step: 0 |batch_x: [ 3. 9. 2. 6. 7.] |batch_y [ 1.5 4.5 1. 3. 3.5]
Epoch: 2 |Step: 1 |batch_x: [ 10. 4. 8. 1. 5.] |batch_y [ 5. 2. 4. 0.5 2.5]
shuffle=False
Epoch: 0 |Step: 0 |batch_x: [ 1. 2. 3. 4. 5.] |batch_y [ 0.5 1. 1.5 2. 2.5]
Epoch: 0 |Step: 1 |batch_x: [ 6. 7. 8. 9. 10.] |batch_y [ 3. 3.5 4. 4.5 5. ]
Epoch: 1 |Step: 0 |batch_x: [ 1. 2. 3. 4. 5.] |batch_y [ 0.5 1. 1.5 2. 2.5]
Epoch: 1 |Step: 1 |batch_x: [ 6. 7. 8. 9. 10.] |batch_y [ 3. 3.5 4. 4.5 5. ]
Epoch: 2 |Step: 0 |batch_x: [ 1. 2. 3. 4. 5.] |batch_y [ 0.5 1. 1.5 2. 2.5]
Epoch: 2 |Step: 1 |batch_x: [ 6. 7. 8. 9. 10.] |batch_y [ 3. 3.5 4. 4.5 5. ]
'''2. TensorDataset
classtorch.utils.data.TensorDataset(data_tensor, target_tensor)
TensorDataset类用来将样本及其标签打包成torch的Dataset,data_tensor,和target_tensor都是tensor。
3. DataLoader
复制代码 代码如下:
classtorch.utils.data.DataLoader(dataset, batch_size=1, shuffle=False, sampler=None,num_workers=0, collate_fn=
dataset就是Torch的Dataset格式的对象;batch_size即每批训练的样本数量,默认为;shuffle表示是否需要随机取样本;num_workers表示读取样本的线程数。
二、PyTorch的Optimizer优化器
本实验中,首先构造一组数据集,转换格式并置于DataLoader中,备用。定义一个固定结构的默认神经网络,然后为每个优化器构建一个神经网络,每个神经网络的区别仅仅是优化器不同。通过记录训练过程中的loss值,最后在图像上呈现得到各个优化器的优化过程。
代码实现:
import torch
import torch.utils.data as Data
import torch.nn.functional as F
from torch.autograd import Variable
import matplotlib.pyplot as plt
torch.manual_seed(1) # 设定随机数种子
# 定义超参数
LR = 0.01 # 学习率
BATCH_SIZE = 32 # 批大小
EPOCH = 12 # 迭代次数
x = torch.unsqueeze(torch.linspace(-1, 1, 1000), dim=1)
y = x.pow(2) + 0.1*torch.normal(torch.zeros(*x.size()))
#plt.scatter(x.numpy(), y.numpy())
#plt.show()
# 将数据转换为torch的dataset格式
torch_dataset = Data.TensorDataset(data_tensor=x, target_tensor=y)
# 将torch_dataset置入Dataloader中
loader = Data.DataLoader(dataset=torch_dataset, batch_size=BATCH_SIZE,
shuffle=True, num_workers=2)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.hidden = torch.nn.Linear(1, 20)
self.predict = torch.nn.Linear(20, 1)
def forward(self, x):
x = F.relu(self.hidden(x))
x = self.predict(x)
return x
# 为每个优化器创建一个Net
net_SGD = Net()
net_Momentum = Net()
net_RMSprop = Net()
net_Adam = Net()
nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam]
# 初始化优化器
opt_SGD = torch.optim.SGD(net_SGD.parameters(), lr=LR)
opt_Momentum = torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8)
opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9)
opt_Adam = torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9, 0.99))
optimizers = [opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam]
# 定义损失函数
loss_function = torch.nn.MSELoss()
losses_history = [[], [], [], []] # 记录training时不同神经网络的loss值
for epoch in range(EPOCH):
print('Epoch:', epoch + 1, 'Training...')
for step, (batch_x, batch_y) in enumerate(loader):
b_x = Variable(batch_x)
b_y = Variable(batch_y)
for net, opt, l_his in zip(nets, optimizers, losses_history):
output = net(b_x)
loss = loss_function(output, b_y)
opt.zero_grad()
loss.backward()
opt.step()
l_his.append(loss.data[0])
labels = ['SGD', 'Momentum', 'RMSprop', 'Adam']
for i, l_his in enumerate(losses_history):
plt.plot(l_his, label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0, 0.2))
plt.show()实验结果:
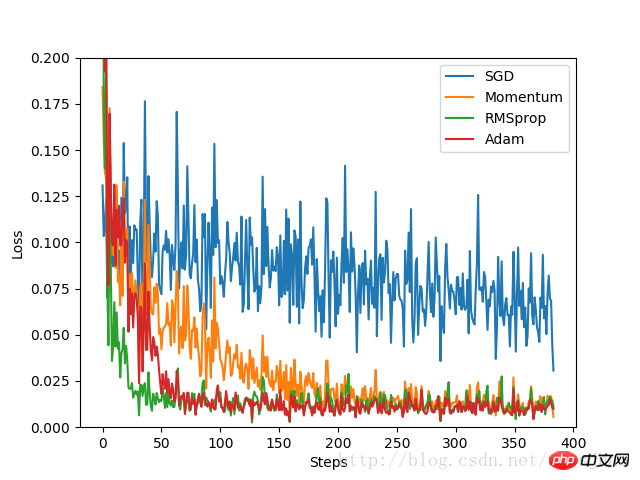
由实验结果可见,SGD的优化效果是最差的,速度很慢;作为SGD的改良版本,Momentum表现就好许多;相比RMSprop和Adam的优化速度就非常好。实验中,针对不同的优化问题,比较各个优化器的效果再来决定使用哪个。
三、其他补充
1. Python的zip函数
zip函数接受任意多个(包括0个和1个)序列作为参数,返回一个tuple列表。
x = [1, 2, 3] y = [4, 5, 6] z = [7, 8, 9] xyz = zip(x, y, z) print xyz [(1, 4, 7), (2, 5, 8), (3, 6, 9)] x = [1, 2, 3] x = zip(x) print x [(1,), (2,), (3,)] x = [1, 2, 3] y = [4, 5, 6, 7] xy = zip(x, y) print xy [(1, 4), (2, 5), (3, 6)]
相关推荐:
以上就是详解PyTorch批训练及优化器比较的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

Copyright 2014-2025 //m.sbmmt.com/ All Rights Reserved | php.cn | 湘ICP备2023035733号




 104
104


























