10000 contenu connexe trouvé
Comment développer des programmes de contrôle de robots efficaces via C++ ?
Présentation de l'article:Comment développer des programmes de contrôle de robot efficaces via C++ Introduction : Avec le développement continu de l'intelligence artificielle et de la technologie robotique, le développement de programmes de contrôle de robot est devenu de plus en plus important. Cet article présentera comment utiliser le langage C++ pour développer des programmes de contrôle de robot efficaces et fournira quelques exemples de code. 1. Comprendre les principes de contrôle des robots. Avant de commencer à développer un programme de contrôle de robot, vous devez d'abord comprendre les principes de contrôle des robots. Le contrôle du robot comprend généralement les aspects suivants : 1. Collecte de données de capteurs : le robot obtient des informations environnementales grâce à divers capteurs.
2023-08-25
commentaire 0
2099

Comment implémenter le contrôle et la navigation des robots en C++ ?
Présentation de l'article:Comment implémenter le contrôle et la navigation des robots en C++ ? Le contrôle et la navigation des robots sont des éléments très importants de la technologie robotique. Dans le langage de programmation C++, nous pouvons utiliser diverses bibliothèques et frameworks pour implémenter le contrôle et la navigation des robots. Cet article explique comment utiliser C++ pour écrire des exemples de code permettant de contrôler des robots et d'implémenter des fonctions de navigation. 1. Contrôle du robot En C++, nous pouvons utiliser la communication série ou la communication réseau pour réaliser le contrôle du robot. Voici un exemple de code qui utilise la communication série pour contrôler le mouvement du robot : inclu
2023-08-25
commentaire 0
1529
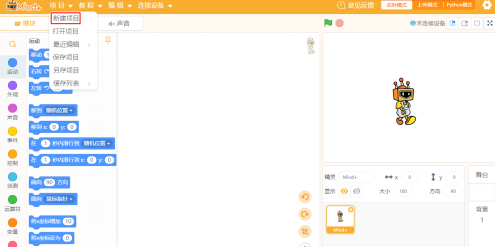
Comment fabriquer un robot marcheur avec la programmation Mind+ - Comment fabriquer un robot marcheur avec la programmation Mind+
Présentation de l'article:Je pense que tout le monde connaît la programmation Mind+, mais savez-vous comment utiliser la programmation Mind+ pour créer un robot ambulant ? L'article suivant vous présente la méthode de fonctionnement pour utiliser la programmation Mind+ pour créer un robot ambulant ? ci-dessous. Open Mind+, cliquez avec le bouton gauche sur [Projet]-[Nouveau projet], créez un nouvel elfe et changez le nom de l'elfe en [Walking Robot] ; cliquez sur [Événement], faites glisser [Petit drapeau vert] vers l'interface de programmation ; ], épissez [Tournez à droite (15) degrés] sous le [petit drapeau vert] ; cliquez sur [Opérateur], faites glisser et déposez [Obtenir un nombre aléatoire entre (1) et (10)] vers l'interface de programmation, puis insérez dans [Tourner à droite (15) degrés] ; cliquez sur [Mouvement] et définissez [Définir la méthode de rotation sur
2024-03-06
commentaire 0
1075
Comment implémenter le contrôle des robots à l'aide de Java
Présentation de l'article:Ces dernières années, la technologie robotique a été largement utilisée, ce qui montre son importance dans le domaine de la science et de la technologie. Le contrôle des robots est également l’un des éléments essentiels du développement des robots. L'utilisation du langage Java pour réaliser le contrôle des robots peut permettre un contrôle rapide des robots et fournir un soutien solide pour le développement ultérieur des robots. Java est un langage de haut niveau qui est devenu un langage de programmation largement utilisé en raison de sa bonne multiplateforme, de son efficacité et de sa sécurité. Il fournit également un bon support pour la mise en œuvre du contrôle du robot. Tout d'abord, vous devez comprendre le contrôle du robot
2023-06-16
commentaire 0
1923

L'ingénierie robotique et la robotique industrielle sont-elles la même spécialité ? Quelle est la différence ?
Présentation de l'article:« Majeure en génie robotique » et « Majeure en robotique industrielle » ne sont généralement pas exactement la même majeure, mais elles peuvent se chevaucher à certains égards. Jetons un coup d'œil aux différences entre eux : 1. Majeure en ingénierie robotique : Il s'agit d'un domaine plus large qui couvre différents types de robotique, notamment les robots industriels, les robots de service, les robots médicaux, les robots agricoles, etc. Le contenu du cours de la majeure en ingénierie robotique peut impliquer la conception mécanique, l'ingénierie électronique, le contrôle d'automatisation, la programmation informatique, l'intelligence artificielle et d'autres aspects, visant à développer les compétences des étudiants dans divers domaines d'application robotique. 2. Majeure en robotique industrielle : elle est davantage axée sur la technologie robotique dans les applications manufacturières et industrielles. Professionnel des robots industriels
2023-09-13
commentaire 0
1541

Contrôle des robots et ses applications en PHP
Présentation de l'article:Avec le développement continu de la technologie de l’intelligence artificielle, les robots sont devenus un élément indispensable de la société moderne. La technologie de contrôle des robots en PHP est également constamment développée et appliquée. Elle peut nous aider à résoudre divers problèmes et à améliorer l'efficacité. Cet article présentera le contrôle des robots et ses applications en PHP. 1. Qu’est-ce que la technologie de contrôle des robots ? La technologie de contrôle des robots fait référence au fonctionnement et au contrôle précis des robots via des ordinateurs ou d'autres appareils électroniques, afin que le robot puisse effectuer diverses tâches selon des programmes prédéfinis. La technologie de contrôle des robots comprend principalement les robots
2023-06-23
commentaire 0
927

L'importance de la 5G pour les robots de fabrication
Présentation de l'article:L’utilisation de robots est souvent associée à la recherche d’efficacité et de productivité. Selon l'Administration du commerce international, une augmentation de 1 % de la densité des robots augmente la productivité de 0,8 % dans tous les secteurs. Aujourd’hui, la robotique dans le secteur manufacturier est le point culminant de cette histoire en cours. Les robots sont désormais utilisés à chaque étape du processus de fabrication dans toutes les industries. Même si la robotique n’est pas nouvelle dans le secteur manufacturier, l’utilisation de ces technologies a explosé ces dernières années. Aux débuts de la robotique, ce sont principalement les grands constructeurs tels que les constructeurs automobiles qui utilisaient des robots mobiles et des robots de peinture pour des tâches telles que la peinture. Cependant, l’évolution rapide de l’environnement commercial a conduit à une augmentation spectaculaire de l’adoption de la robotique dans le secteur manufacturier par les entreprises de toutes tailles. Degré d’adoption de la robotique dans le secteur manufacturier
2024-05-08
commentaire 0
948
Comment développer le contrôle et l'automatisation de robots en PHP ?
Présentation de l'article:En tant que langage de programmation largement utilisé dans le développement Web, PHP présente également une valeur applicative importante dans les domaines du contrôle des robots et du développement de l'automatisation. Cet article expliquera comment réaliser le développement du contrôle et de l'automatisation des robots en PHP. 1. Qu'est-ce que le contrôle du robot ? Les robots font référence à des appareils intelligents basés sur la technologie de l’intelligence artificielle qui peuvent simuler le comportement humain et accomplir une série de tâches de manière autonome. Le contrôle des robots fait référence au processus de traitement de l'information, de transmission d'instructions et de surveillance des robots via des ordinateurs. 2. Comment contrôler des robots avec PHP
2023-05-21
commentaire 0
1531
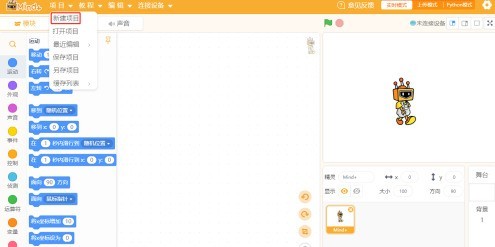
Comment utiliser la programmation Mind+ pour créer un robot ambulant.
Présentation de l'article:Open Mind+, cliquez sur [Projet]-[Nouveau projet] avec le bouton gauche de la souris, créez un nouvel elfe et changez le nom de l'elfe en [Walking Robot]. Cliquez sur [Événement] et faites glisser le [Petit drapeau vert] vers l'interface de programmation. Cliquez sur [Mouvement] et collez [Tourner à droite (15) degrés] sous le [Petit drapeau vert]. Cliquez sur [Opérateur], faites glisser [Obtenir un nombre aléatoire entre (1) et (10)] vers l'interface de programmation, puis insérez-le dans [Tourner à droite (15) degrés]. Cliquez sur [Mouvement] et collez [Définissez la méthode de rotation pour retourner à gauche et à droite] ci-dessous [Tournez à droite et prenez un nombre aléatoire de degrés entre (1) et (10)]. Cliquez sur [Contrôle] et collez [Exécution de boucle] sous [Définir le mode de rotation pour retourner à gauche et à droite]. Cliquez sur [Mouvement] et raccordez [Déplacer (10) pas] à [Boucle]
2024-06-03
commentaire 0
646


Qui a proposé le principe du contrôle des programmes stockés ?
Présentation de l'article:La personne qui a proposé le principe du contrôle par programme stocké était "Von Neumann". Le célèbre mathématicien américain d'origine hongroise von Neumann a résumé l'expérience du processus de développement d'ENIAC et a proposé le principe du contrôle par programme stocké. Les points clés du contrôle des programmes stockés sont les suivants : le système numérique des ordinateurs numériques utilise le binaire ; l'ordinateur doit s'exécuter conformément à la séquence du programme.
2021-05-07
commentaire 0
22004

Le moteur de contrôle de robot de nouvelle génération de Peitian, ReaLink-Motion, ouvre une nouvelle ère d'IA pour les systèmes de contrôle de robot
Présentation de l'article:Avec le développement des moteurs physiques, des environnements de simulation et d'autres technologies connexes, le comportement des robots ainsi que les coûts d'apprentissage et de formation diminuent rapidement, et les nouvelles technologies de contrôle des robots devraient réaliser des percées. Par rapport au contrôle par algorithme déterministe traditionnel actuel, le mouvement du robot sera transformé en une méthode de contrôle probabiliste et de contrôle d'intelligence artificielle (IA) basée sur les données. Le moteur de contrôle de robot de nouvelle génération de Peitian Robot, ReaLink-Motion, espère utiliser la technologie de l'IA pour atteindre le nec plus ultra en matière de coordination œil-main, en transformant les instructions étape par étape sur la façon de fabriquer un robot en lui indiquant simplement ce qu'il doit faire. On espère que dans un environnement en évolution rapide, les robots pourront s'adapter et maintenir un travail rapide, précis et fluide comme les humains. La nouvelle génération de technologies de l'information et de la communication représentée par le cloud computing, le big data, l'intelligence artificielle, la 5G, etc. .
2023-09-19
commentaire 0
1384
Notes d'étude PHP : robots intelligents et contrôle d'automatisation
Présentation de l'article:Notes d'étude PHP : Robots intelligents et contrôle d'automatisation, des exemples de code spécifiques sont nécessaires Introduction : À l'ère d'une technologie moderne de plus en plus développée, les robots intelligents sont de plus en plus largement utilisés. En tant que langage de script puissant, PHP peut également être utilisé pour développer des systèmes robotiques intelligents. Cet article présentera en détail comment utiliser PHP pour réaliser un contrôle automatique de robots intelligents. Nous fournirons des exemples de code spécifiques pour aider les lecteurs à mieux comprendre et appliquer cette technologie. 1. Concepts de base des robots intelligents Un robot intelligent est un robot capable de simuler la pensée humaine et
2023-10-10
commentaire 0
876

Nouvelle solution de polissage intégrée : robot + contrôle de force, pour une grande flexibilité, une haute précision et un haut rendement !
Présentation de l'article:À l’heure actuelle, la méthode traditionnelle de polissage manuel est inefficace, le contrôle qualité est difficile à assurer et la qualité des produits est inégale. Basé sur les avantages d'une technologie de base indépendante et d'une chaîne écologique de production complète, Estun a lancé une solution complète pour le polissage robotisé avec un contrôle flexible, une haute précision et un fonctionnement pratique. La méthode de meulage traditionnelle est inefficace. 1. La cohérence des matériaux entrants ne peut être garantie : le soudage, le moulage et d'autres processus de production industrielle provoqueront une déformation du produit. 2. Les scènes de contact ont des exigences de réponse extrêmement élevées : meulage rigide, collision se produit « en un instant ». 3. Le processus de meulage est extrêmement complexe : il existe de nombreux types d'outils et d'abrasifs, il n'existe pas de normes concernant les exigences de meulage et les données de processus reposent sur l'expérience. Une nouvelle génération de technologie de polissage : le processus de polissage intégré des robots et le contrôle de la force imposent des exigences plus élevées en matière de précision de contact et de vitesse de réponse du robot, ce qui ne teste pas seulement la machine.
2023-09-16
commentaire 0
1647
PHP réalise une technologie de contrôle de robot en temps réel
Présentation de l'article:Avec le développement de la technologie informatique, la technologie robotique a été largement utilisée et développée. Le contrôle des robots est un élément extrêmement important de la technologie robotique, et le contrôle des robots en temps réel en est un élément clé. Cet article présentera la méthode d'implémentation de la technologie de contrôle de robot en temps réel en PHP. 1. Introduction à la technologie de contrôle des robots La technologie de contrôle des robots est l'une des technologies de base des robots. Elle fait référence à l'utilisation d'ordinateurs et d'autres technologies de contrôle pour atteindre des objectifs et des tâches spécifiques en manipulant diverses actions, mouvements et postures du robot. Master en technologie de contrôle de robot
2023-06-28
commentaire 0
868
Certains internautes se demandent si Microsoft construit Skynet, car ChatGPT peut déjà contrôler les robots et les ingénieurs n'ont pas besoin d'écrire du code.
Présentation de l'article:Alors que je me vantais encore de ChatGPT, quelqu'un l'utilisait déjà pour contrôler un robot. Ce n’est autre que Microsoft, le bailleur de fonds d’OpenAI, qui a récemment « réinventé le moteur de recherche » avec ChatGPT. Jusqu'à présent, le seuil technique permettant aux développeurs de former des robots est non seulement élevé, mais aussi long et difficile : les ingénieurs doivent constamment écrire manuellement de nouveaux codes et spécifications dans la boucle de flux de travail pour corriger le comportement des robots, en plus de différents langages de programmation ; peut être nécessaire pour contrôler différents robots et environnements. Avec l'aide de ChatGPT, les ingénieurs n'ont même pas besoin d'écrire du code à la main : ils décrivent directement ce qu'ils veulent faire avec des mots humains, et l'IA peut le traduire automatiquement en langage machine. Cela signifie que d'une part, l'efficacité de l'interaction entre les professionnels et les robots a décollé, et d'autre part, le seuil technique a été dépassé ;
2023-05-08
commentaire 0
1381
Le marché des robots de contrôle mobiles atteindra 19 milliards de dollars d'ici 2028
Présentation de l'article:Dans le paysage dynamique de la robotique, les robots de contrôle mobiles redéfiniront l’efficacité, la polyvalence et l’innovation dans tous les secteurs. La taille du marché des robots de contrôle mobiles devrait passer de 10,17 milliards de dollars américains en 2023 à 19,81 milliards de dollars américains en 2028, avec un taux de croissance annuel composé de 14,26 % au cours de la période de prévision. Cette tendance de croissance rapide est soutenue par de multiples facteurs qui déterminent l’application et le développement de robots de contrôle mobiles. Les robots de contrôle mobiles sont largement utilisés dans diverses industries telles que l'industrie manufacturière, l'agriculture, la santé et bien d'autres encore. Ils peuvent se déplacer librement dans différents environnements et accomplir diverses tâches, et se caractérisent par leur flexibilité et leur intelligence. La fabrication est un domaine d’application important pour les robots de commande mobiles. Les robots de contrôle mobiles peuvent effectuer différentes tâches sur les lignes de production
2024-04-08
commentaire 0
687

Comment personnaliser le robot PHP Slack pour implémenter une fonction de réponse automatique personnalisée
Présentation de l'article:Comment personnaliser le bot PHPSlack pour obtenir une fonction de réponse automatique personnalisée Slack est une plate-forme de collaboration en équipe, et les robots sont l'une de ses fonctionnalités les plus distinctives. En personnalisant un bot PHPSlack, vous pouvez implémenter des fonctions de réponse automatique personnalisées, permettant au bot de vous offrir, à vous et à votre équipe, plus de commodité et de plaisir. Ce qui suit présente en détail comment personnaliser le robot PHPSlack, avec des exemples de code spécifiques pour référence. Veuillez noter que cet article suppose que vous avez déjà créé un
2023-09-13
commentaire 0
1536
Quelle est la relation entre les instructions machine et les microinstructions dans un contrôleur microprogrammé ?
Présentation de l'article:Dans un contrôleur microprogrammé, la relation entre les instructions machine et les micro-instructions est la suivante : « chaque instruction machine est interprétée et exécutée par un microprogramme programmé avec des micro-instructions ». L'instruction machine est la plus petite unité fournie à l'utilisateur pour la programmation, et la micro-instruction est un ensemble. of Une collection de microcommandes avec une fonction spécifique, généralement exprimée en codage binaire.
2020-09-29
commentaire 0
24759

Collèges et universités du Henan où vous pouvez postuler pour des spécialisations de premier cycle en ingénierie robotique
Présentation de l'article:Les écoles qui peuvent postuler pour la spécialisation en ingénierie robotique dans le Henan, du collège au premier cycle en 2023, comprennent : Henan Engineering College, Henan Institute of Technology, Nanyang Institute of Technology, Shangqiu College, Xinxiang College, Zhengzhou Institute of Industrial Application Technology, Zhengzhou University of. Science et technologie Majeure en ingénierie robotique Introduction à la majeure en ingénierie robotique est une discipline impliquant la conception, le développement et l'application de la robotique. Cette majeure forme les étudiants à maîtriser les principes, la structure et les méthodes de contrôle des robots, ainsi qu'à l'application des robots dans l'industrie, le traitement médical, l'agriculture et d'autres domaines. Les étudiants apprendront la structure mécanique, le contrôle électronique, la technologie des capteurs, l'intelligence artificielle et d'autres connaissances connexes sur les robots. En Génie Robotique, les étudiants reçoivent une formation alliant théorie et pratique. Ils apprendront les techniques de conception et de modélisation de robots, ainsi que les méthodes de programmation et de contrôle des robots.
2023-09-20
commentaire 0
1700

