


Un utilisateur a posté une vidéo de Tesla FSD v12 sur Internet, et quelqu'un l'a déplacée vers le site b :
https://www.bilibili.com/video/BV1Z6421M797www.bilibili.com/video/BV1Z6421M797
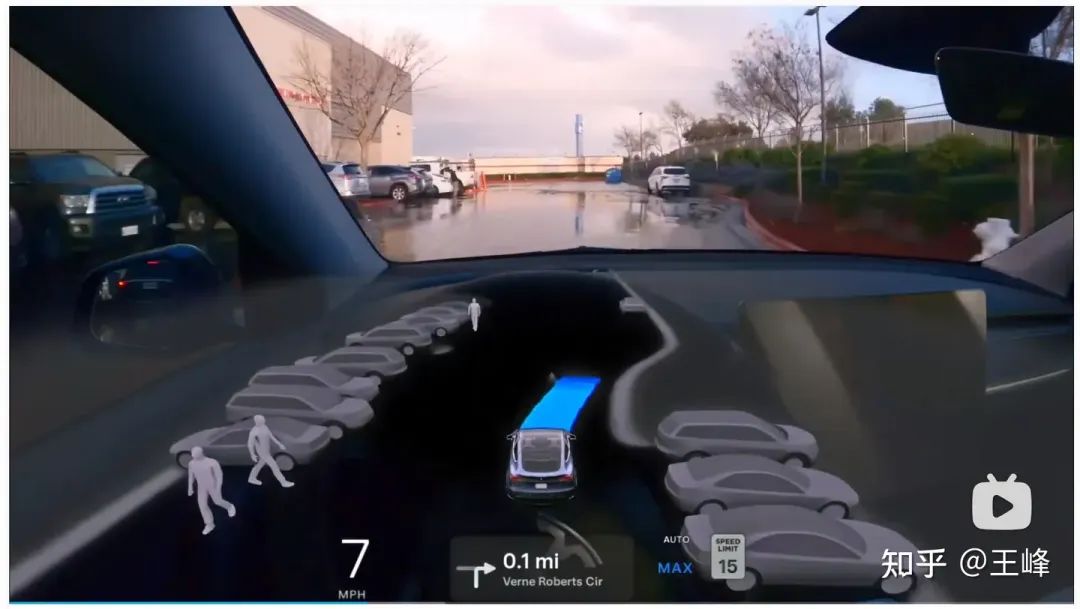
Cette fois il s'agit d'une scène purement visuellement complexe : il pleut et il y a de l'eau sur le sol, et divers motifs se reflètent sur l'eau, ce qui peut produire des effets visuels étranges. Tesla n'a pas organisé d'événement AI Day l'année dernière, prétendument parce que les concurrents provoquaient souvent leurs glissades, et l'ont donc simplement annulé. En l’absence de détails, regarder la vidéo donne un aperçu de certaines fonctionnalités de bout en bout. Ensuite, analysons quelques-uns des points intéressants.
01:57, a détecté par erreur que la portière de la voiture était ouverte, et a fait un grand détour :

Ce n'est pas un gros problème ici, il y a un espace relativement grand sur le côté gauche, donc ce n'est pas grave si vous faites le tour un peu plus longtemps.
02:09, une erreur de détection d'occ a provoqué quasiment un arrêt :

Les piétons sont partis, nous pouvons commencer à avancer. Cependant, il y avait beaucoup d'eau stagnante au sol, reflétant l'image de l'objet, ce qui pouvait conduire à de fausses détections, nous nous sommes donc arrêtés et avons attendu un moment avant de repartir.
04:40, le véhicule d'intervention en marche arrière à courte portée a été manqué


Le véhicule d'intervention en marche arrière à très courte portée sur le côté gauche a été manqué, mais la planification ne semble pas donner l'intention de le démarrage, qui reflète la fin. Un avantage majeur du bout en bout : les résultats des erreurs en amont n'entraînent pas nécessairement un mauvais comportement de conduite. Nous verrons d'autres exemples similaires plus tard.
05:37 Erreur de détection d'occ

Cela peut aussi être un occ provoqué par une accumulation d'eau au sol J'ai accepté ce résultat bout à bout et j'ai tourné le volant à gauche et à droite, parfois vers la gauche. et parfois à droite.
05:48, erreur de détection d'OCC à bout portant à gauche et à droite

Il y a eu une erreur de détection d'OCC à une position très rapprochée à gauche et à droite. Si vous suivez toujours les règles, vous devrez peut-être le signaler. c'est pour prendre le relais (pas forcément, après tout, ce n'est pas rouler) Sur piste), ici j'ignore directement ces deux OCC de bout en bout et continue de rouler.
06:57, Erreur de détection d'un piéton à bout portant devant vous

C'est vraiment cool, un piéton apparaît sur le visage, toutes les commandes basées sur des règles freineront définitivement + alarme à ce moment, mais la fin Le modèle final ne reconnaît pas les résultats en amont et continue de fonctionner comme d'habitude.
14 points : Je tournais dans un parking privé et je n'arrivais pas à sortir
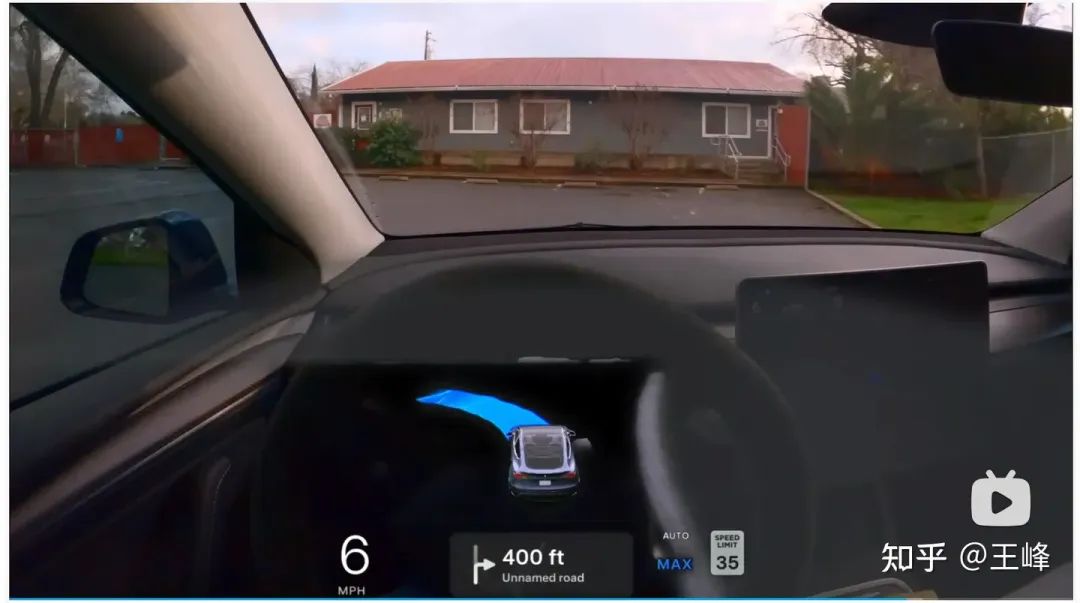
C'est peut-être un problème avec la distance de détection insuffisante du BEV. Je n'arrivais pas à trouver la sortie et je tournais dans un parking. . .
Les autres clips concernent la conduite sur route principale, les performances du FSD v12 sont très fluides, il n'y a pas de gros problème, surtout la détection des lignes de voie la nuit est également très stable, mais je pense la plupart des fabricants peuvent également atteindre ce niveau, je n'en parlerai pas beaucoup.
En regardant uniquement la section du parking, si vous ne regardez pas les résultats en amont, à l'exception de l'erreur de détection de l'OCC avant qui a fait tourner le volant à gauche et à droite, la trajectoire du FSD v12 est encore relativement fluide, et même s'il y a des erreurs, il n'y a aucune situation où il reste bloqué. Dans une telle scène avec des piétons, des obstacles en mouvement irrégulier (chariots) et de l'eau au sol, la performance est effectivement correcte.
Tesla utilise toujours le multitâche de bout en bout avec une supervision de module intermédiaire, de sorte que le front-end peut toujours afficher les résultats de obj det et occ. Cependant, la réglementation de bout en bout n'accepte pas nécessairement les résultats en amont. Une détection manquée à courte distance n'entraîne pas nécessairement un démarrage et un accident, et une détection erronée à courte distance ne provoque pas nécessairement l'arrêt du véhicule. . Tous les résultats sont entrés dans le PNC pour un jugement complet. C’est effectivement un point intéressant. Ce qui est sûr, c’est que Musk ne ment pas. Il s’agit bien de la performance d’un système de bout en bout.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 méthode de sauvegarde des données MySQL
méthode de sauvegarde des données MySQL
 Windows ne trouve pas la solution au certificat
Windows ne trouve pas la solution au certificat
 Comment activer le serveur TFTP
Comment activer le serveur TFTP
 Comment vérifier l'adresse IP d'un ordinateur
Comment vérifier l'adresse IP d'un ordinateur
 Raisons pour lesquelles l'imprimante Windows n'imprime pas
Raisons pour lesquelles l'imprimante Windows n'imprime pas
 méthode js pour générer des nombres aléatoires
méthode js pour générer des nombres aléatoires
 Comment désactiver la protection en temps réel dans le Centre de sécurité Windows
Comment désactiver la protection en temps réel dans le Centre de sécurité Windows
 Comment commenter le code en HTML
Comment commenter le code en HTML








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



