


LimX Dynamics, une société de robots à pieds généralistes, a officiellement lancé son premier produit entièrement auto-développé "Four-wheeled Foot Robot W1". Ce produit est développé sur la base de la « Motion Intelligence » de Zhuji Dynamics. Il est équipé des meilleurs algorithmes de perception et de contrôle de mouvement au monde, intégrant les avantages des structures de jambes et de roues. Dans le même temps, il est également équipé d'une variété d'articulations haute performance auto-développées, permettant une puissante perception du terrain en temps réel et des capacités de mobilité tout-terrain, améliorant considérablement les capacités opérationnelles du robot à pieds. Grâce à ce robot à quatre roues W1, Zhuji Dynamics Company a ciblé l'énorme marché potentiel des ébauches de la Chine et a saisi l'opportunité d'avoir un impact direct sur les clients B-end tels que les inspections industrielles, la logistique et la distribution, les opérations spéciales, la recherche scientifique et l'éducation, etc. Expérience d'application des points douloureux. Zhuji Dynamics W1 commencera à accepter les précommandes au quatrième trimestre de cette année

Zhuji Dynamics lance le premier robot à quatre roues W1
Le robot à quatre roues W1 a une technologie et des capacités de produit révolutionnaires
Destiné à usage général Le robot à pieds possède toutes les articulations haute performance auto-développées par Zhuji Dynamics, permettant à W1 de maximiser la capacité composite de combiner quatre jambes et quatre roues, réalisant un mouvement hautement dynamique et des capacités de dépassement d'obstacles tout-terrain, ce qui est mieux qu'un robot simple à quatre pattes. Plus efficace, agile et plus adapté à la plupart des scénarios d'application pratiques.
Équipé d'algorithmes de base tels que le contrôle de mouvement basé sur la perception de Zhuji Dynamics, W1 a réussi à conquérir des terrains discrets extrêmement difficiles tels que des escaliers et peut couvrir la plupart des scènes complexes sans roues. Il s'agit du premier jeu chinois basé sur la perception autonome du terrain. -planification et contrôle de la marche du temps pour réaliser un produit à quatre roues qui monte et descend les escaliers.
Grâce à ses avantages naturels de forme et à ses capacités logicielles et matérielles de première classe, W1 présente une excellente efficacité mobile, une excellente capacité de charge et une excellente autonomie, répondant véritablement aux exigences d'utilisation réelles des clients.

W1 est un robot à quatre roues avec d'excellentes capacités de mouvement
À l'heure actuelle, le robot à quatre roues Zhuji Dynamics W1 a réussi la vérification des capacités de plusieurs scénarios d'application complexes et est entièrement préparé pour des applications pratiques.
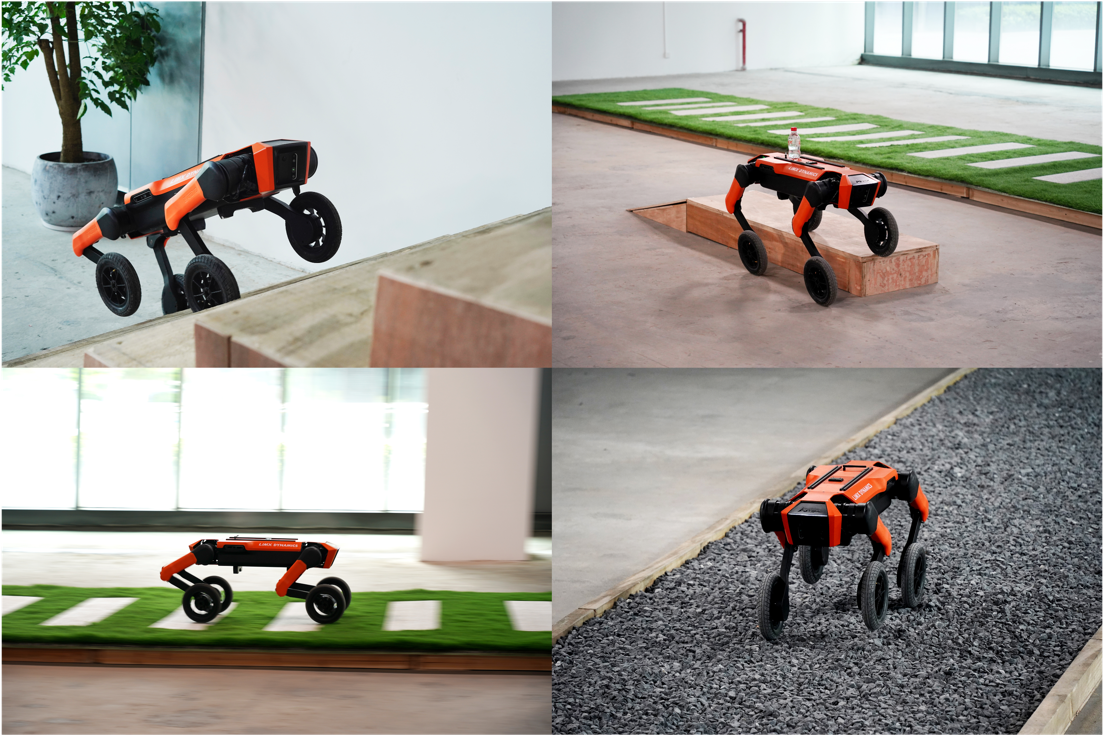
Robot à quatre roues W1 A réussi la vérification de capacité dans plusieurs scénarios d'application complexes
Un robot quadrupède doit avoir presque les mêmes capacités qu'un robot quadrupède, mais les défis d'interférence de perception, d'estimation d'état et de contrôle de mouvement apportés par l'hybride roue-pied ont augmenté de façon exponentielle. Il n'existe pas de solution mature au monde et c'est le cas. extrêmement difficile. Afin de tirer pleinement parti des avantages de la forme composite des pieds à roues, nous devons résoudre les problèmes à long terme auxquels sont confrontés le monde universitaire et l'industrie.
Zhuji Dynamics maîtrise parfaitement les technologies de base de l'intelligence du mouvement des robots à pieds, en utilisant la détection du terrain. , apprentissage par renforcement et corps multi-rigides Forts d'une expérience universitaire et en R&D dans les domaines de la dynamique, de la dynamique hybride, du contrôle prédictif de modèles et d'autres domaines, nous avons établi un cadre algorithmique de premier plan pour intégrer la perception et le contrôle afin d'obtenir une plus grande stabilité et des capacités de contrôle en temps réel plus fortes. .
Pour passer du prototype au produit, il est particulièrement essentiel de faire un bon travail d'interaction en temps réel entre le robot et l'environnement. Dès le début, Zhuji Dynamics a pris comme principe la combinaison des capacités de perception et du contrôle de mouvement. une technologie de base pour résoudre les problèmes clés et un matériel défini basé sur des algorithmes logiciels, toutes les articulations haute performance auto-développées permettent au robot à quatre roues de tirer pleinement parti de ses excellentes capacités de mouvement physique.
Le Dr Zhang Wei, fondateur de Zhuji Dynamics, a déclaré : « Les robots à pieds à usage général sont dans une période d'explosion technologique. L'intersection de la recherche fondamentale et de la commercialisation a émergé et continue de se développer. Nous avons choisi le robot à pieds à quatre roues W1. au bon moment. Le premier produit phare est de créer un châssis universel efficace avec une mobilité tout-terrain. Il s'agit d'un produit brise-glace qui ancre la prochaine meilleure intersection de la technologie, de l'application et du marché. résolu, permettant aux robots à pieds d'entrer véritablement dans l'industrie et de créer de la valeur.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Comment configurer WeChat pour qu'il exige mon consentement lorsque des personnes m'ajoutent à un groupe ?
Comment configurer WeChat pour qu'il exige mon consentement lorsque des personnes m'ajoutent à un groupe ?
 Solution à la réinitialisation de la connexion
Solution à la réinitialisation de la connexion
 Quels sont les serveurs exemptés d'enregistrement ?
Quels sont les serveurs exemptés d'enregistrement ?
 Raisons pour lesquelles l'accès au site Web provoque une erreur de serveur interne
Raisons pour lesquelles l'accès au site Web provoque une erreur de serveur interne
 Qu'est-ce que le trading de devises numériques
Qu'est-ce que le trading de devises numériques
 Utilisation de la classe de calendrier en Java
Utilisation de la classe de calendrier en Java
 Frais de location de serveur
Frais de location de serveur
 Service d'accélération CDN sans inscription
Service d'accélération CDN sans inscription








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



