


À l'ère de la conduite intelligente, les automobiles transforment le nouvel avenir. Les logiciels et matériels automobiles, l’architecture interne, le modèle de concurrence industrielle et la répartition de la valeur dans la chaîne industrielle subiront également de profonds changements. Dans le cadre de cette vague de changement, nous pensons que la conduite intelligente passera successivement par trois étapes : une utilisation accrue de la conduite assistée, des solutions de conduite autonome matures et une écologie de conduite autonome améliorée, et apportera trois vagues d'opportunités pour le matériel, les systèmes logiciels et commerciaux. opérations respectivement.
Parmi eux, HD Map (carte haute définition), en tant que facteur clé de la navigation et du positionnement, subira également des changements de conception majeurs. Cela se reflète principalement dans les aspects importants suivants :
La carte de navigation fournit la longueur d'une voie et les conditions routières approximatives de la distance concernée. La carte de haute précision fournit des conditions routières très détaillées. Tels que la signalisation routière, la pente, les lignes de voie et l'emplacement des lignes de voie. Ceux-ci seront marqués sur la carte HD. Sur la carte de haute précision, même l'emplacement d'un certain feu de circulation est marqué par des données GPS de haute précision. Par conséquent, lorsqu'un véhicule sans pilote circule sur la route, tant qu'il dispose des chemins tracés dans la planification globale des chemins, puis convertit ces chemins en chemins au niveau de la ligne de voie, le véhicule sans pilote peut suivre chaque chemin marqué sur le haut. -carte de définition. Conduite sur la ligne médiane de chaque voie.
La carte de haute précision est connectée à d'autres modules de véhicules sans pilote, notamment le positionnement, la prédiction, la perception, la planification, la sécurité, la simulation, le contrôle , Interaction homme-machine, tout cela nécessite l’aide de cartes de haute précision. Ce n'est pas que certains modules ne peuvent pas mettre en œuvre ces fonctions sans cartes de haute précision, mais avec l'aide de cartes de haute précision, ils peuvent obtenir des informations plus précises et prendre des décisions plus adaptées aux conditions de circulation du moment. Je ne m'étendrai pas ici sur les aspects techniques plus détaillés, juste une explication de leurs idées générales
Le rôle principal des cartes de haute précision dans le positionnement est qu'il fournit Recevoir les informations des objets statiques qui ont été déterminés. Le véhicule sans pilote peut alors à son tour trouver sa position relative sur l’ensemble de la carte sur la base des informations de ces objets statiques. Si ces objets statiques ont leurs propres coordonnées de latitude et de longitude de haute précision, le véhicule sans pilote peut trouver inversement ses propres coordonnées de latitude et de longitude en fonction de ces coordonnées de latitude et de longitude, réalisant ainsi une fusion de capteurs basée sur des cartes de haute précision et un positionnement de caméras lidar. méthode. De cette façon, vous pouvez vous débarrasser des données GPS. Parce que les données GPS ont un bruit très fort lorsque les données sont bloquées. Bien entendu, à ce stade, la précision de la méthode de positionnement basée sur la fusion des capteurs radar et vision n'est pas aussi précise que les données fournies par le GPS différentiel, mais il s'agit toujours d'une méthode de positionnement. Après tout, lorsqu'il n'y a pas de signal GPS, le véhicule ne peut pas conduire sans ses propres informations de positionnement. Pour le moment, il ne peut s'appuyer que sur d'autres méthodes de positionnement.
La relation entre la carte haute précision et le module de prise de décision est encore plus simple. Car si le véhicule connaît l'itinéraire qu'il souhaite emprunter dans le futur ainsi que les panneaux de signalisation, les feux de circulation et les informations routières liées à l'itinéraire qu'il souhaite emprunter, le module de prise de décision peut prendre des décisions qui correspondent mieux aux conditions routières actuelles. Cela équivaut à si nous savons ce qui se passera dans le futur, nous pouvons ajuster notre comportement actuel à temps pour faire face à ce qui se passera dans le futur.
La relation entre la carte HD et le module de simulation est plus facile à comprendre car il suffit de positionner le véhicule ou d'utiliser d'autres algorithmes sur une carte aux normes de carte HD Si vérifié , les informations obtenues par le véhicule dans les applications réelles sont les mêmes que les informations que nous obtenons en simulation. En d’autres termes, le code que nous construisons dans l’environnement de simulation peut également être utilisé dans une large mesure dans l’environnement réel.
Le module de perception en conduite sans conducteur est un module relativement complexe. Parce que cela implique de très nombreux problèmes réels. Mais en réalité, beaucoup de choses dans la plupart des environnements que nous percevons sont statiques. Ainsi, dans cet environnement statique, nous n’avons pas besoin d’utiliser une puissance de calcul supplémentaire pour calculer à l’avance les éléments pouvant être stockés dans la base de données. Par exemple, si un certain bâtiment se trouve à un certain endroit, quel que soit le nombre de fois où le véhicule se rend à cet endroit, le bâtiment qu'il voit à chaque fois se trouve à ce point. Quelle que soit la méthode de perception, la position du bâtiment ne changera pas avec la perception du véhicule. Ensuite, l'emplacement spécifique de ce genre de chose peut être collecté par un véhicule de collecte de cartes de haute précision, puis les données peuvent être stockées sur le disque dur local du véhicule sans pilote. Ensuite, le véhicule sans pilote peut utiliser cette base de données pour savoir qu'il y a un bâtiment à chaque fois qu'il se dirige vers ce bâtiment sans l'identifier. Tout comme le module de positionnement, si nous connaissons les coordonnées de haute précision de ce bâtiment, nous pouvons inversement trouver notre propre position en fonction de ces coordonnées. De plus, la puissance de calcul peut être concentrée pour identifier des objets dynamiques autres que ce bâtiment en fonction de la forme du bâtiment et de ses caractéristiques physiques préparées à l'avance.
Le contenu spécifique du contrôle est très détaillé, et je ne suis pas très clair à ce sujet. Mais s'il s'agit de contrôler l'angle de braquage, les données de la ligne médiane de la ligne de voie fournies par la carte de haute précision sont essentielles. Car même si la ligne de voie sera identifiée sur la base de la caméra, la position de la ligne médiane sera alors identifiée sur la base de cette ligne de voie. Mais ces éléments ne sont toujours pas aussi précis que les données fournies par les cartes de haute précision. Après tout, la reconnaissance des lignes de voie par caméra est en temps réel et entraînera certainement des erreurs de temps en temps. Ou lorsque les lignes de voie deviennent floues parce qu'elles n'ont pas été maintenues pendant une longue période, la caméra ne peut pas reconnaître les informations correspondantes sur les lignes de voie. Dans ce cas, des cartes de haute précision sont nécessaires. Les lignes de voie sont une donnée très importante dans la conduite humaine, c'est pourquoi la conduite autonome actuelle basée sur une caméra ne peut être mise en œuvre que sur les autoroutes. Car seules les lignes de voie sur l’autoroute sont dans un meilleur état d’entretien. Peut être identifié relativement facilement. En revanche, les lignes de voies en milieu urbain ne sont pas bien entretenues. Par conséquent, la conduite autonome basée sur une caméra sur les routes urbaines n’est pas encore recommandée.
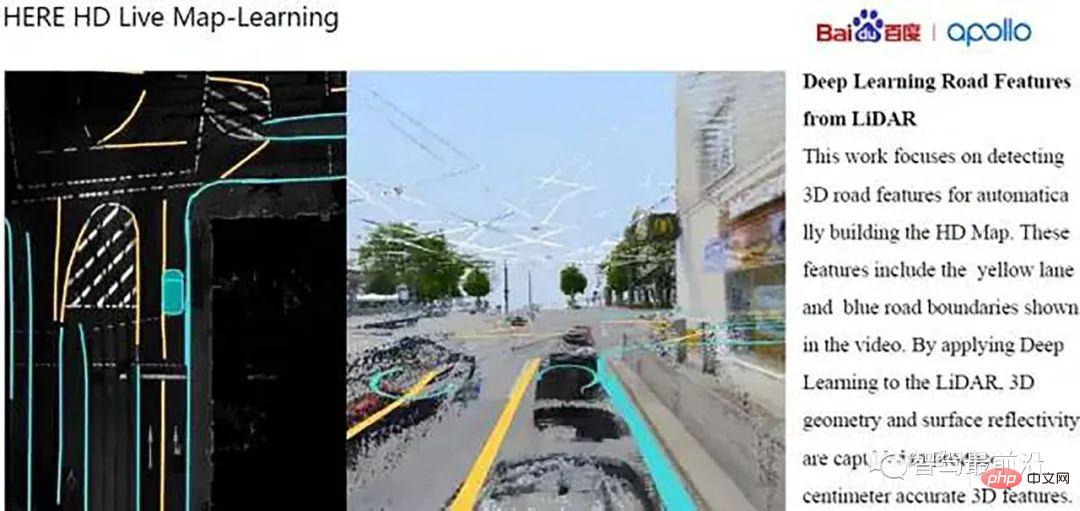
Pour être honnête, je n'en ai pas parlé ici, mais je l'ai entendu du professeur. Des cartes haute définition sont d'abord utilisées pour balayer les rues par des véhicules équipés de divers capteurs. Une fois que ce type de véhicule a scanné chaque rue, il peut obtenir des informations pertinentes sur les nuages de points, des informations sur la caméra et d'autres informations de haute précision sur la longitude et la latitude. Le personnel les modifiera ensuite hors ligne sur la base de ces informations. Il s’agit ici de l’épissage des nuages de points, des informations routières reconnues par les caméras, telles que les lignes de voie, les passages piétons et les feux de circulation. Ces objets statiques doivent être confirmés et marqués par le personnel. Bien que la caméra du véhicule d'acquisition effectue une reconnaissance préliminaire des caractéristiques pour extraire ces caractéristiques liées à la route. Mais après tout, il est basé sur la vision par ordinateur, et les informations extraites ne sont pas correctes à 100 %. Il se peut qu'elles soient fausses, ou que certaines annotations ne soient pas bien marquées. Par conséquent, la dernière étape nécessite toujours que le personnel procède à la confirmation et à la notation finales.
Le développement futur de la conduite autonome s'orientera principalement vers les deux directions de l'intelligence et de la mise en réseau, l'accent étant mis sur Du côté du véhicule, l'intelligence évolue progressivement vers une intelligence de bout en bout et même basée sur le cloud. Pour le déploiement de cartes de haute précision, les points les plus importants sont la série de mises à niveau et de changements intervenus du côté du cloud, du bord de la route et du côté des véhicules. Parmi eux, les changements dans le cloud concernent principalement les services de cartographie de haute précision, l'agrégation de données fragmentées, les limites de données et le partage de données. Le côté routier implique principalement plusieurs aspects tels que la mise à jour participative des cartes fragmentées, la gestion des versions de cartes, la sous-traitance de cartes, l'optimisation des informations dynamiques en bord de route et les services de messages cartographiques. Lorsqu'elle est appliquée à la voiture, elle nécessite une fusion de données sous-traitée, une restauration de scènes V2X et des moteurs de cartographie de haute précision qui doivent être mis à jour en conséquence.

Le processus de mise à jour itérative de la carte ci-dessus peut être appliqué pour réaliser des fonctions de conduite autonome L4/L5 et générer des modes de contrôle de robot pertinents. Il peut également être utilisé dans la réalisation de véhicules utilitaires pour finalement parvenir à une conduite autonome et même à une conduite à distance.
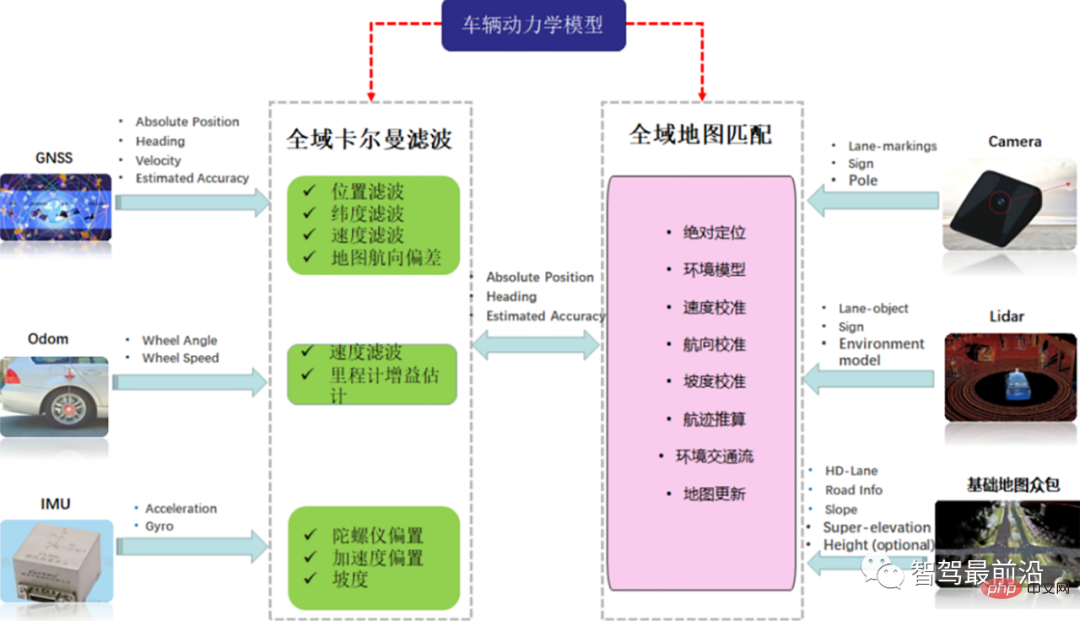
De toute évidence, pour que les cartes de haute précision obtiennent un positionnement précis et s'étendent continuellement vers l'avant pour améliorer leurs performances fonctionnelles, elles doivent être obtenues en optimisant continuellement leur propre positionnement par fusion. solution. Ce processus implique deux algorithmes logiciels principaux. La première consiste à effectuer une estimation dynamique optimale de la pose du véhicule grâce à un filtrage de Kalman étendu à l'état complet ; la seconde consiste à utiliser des capteurs visuels pour obtenir des informations sémantiques sur l'environnement routier et obtenir des positions précises grâce à des algorithmes de correspondance de cartes précis. En outre, il est nécessaire d’améliorer l’économie, l’ajustement et les performances globales. En choisissant de configurer un terminal RTK de qualité industrielle monté sur véhicule : en utilisant un processeur 32 bits de qualité industrielle haute performance, une carte RTK de haute précision intégrée ; Au serveur différentiel et recevoir des signaux différentiels en même temps. Après avoir reçu les informations, les informations de localisation précises sont émises via RS232.
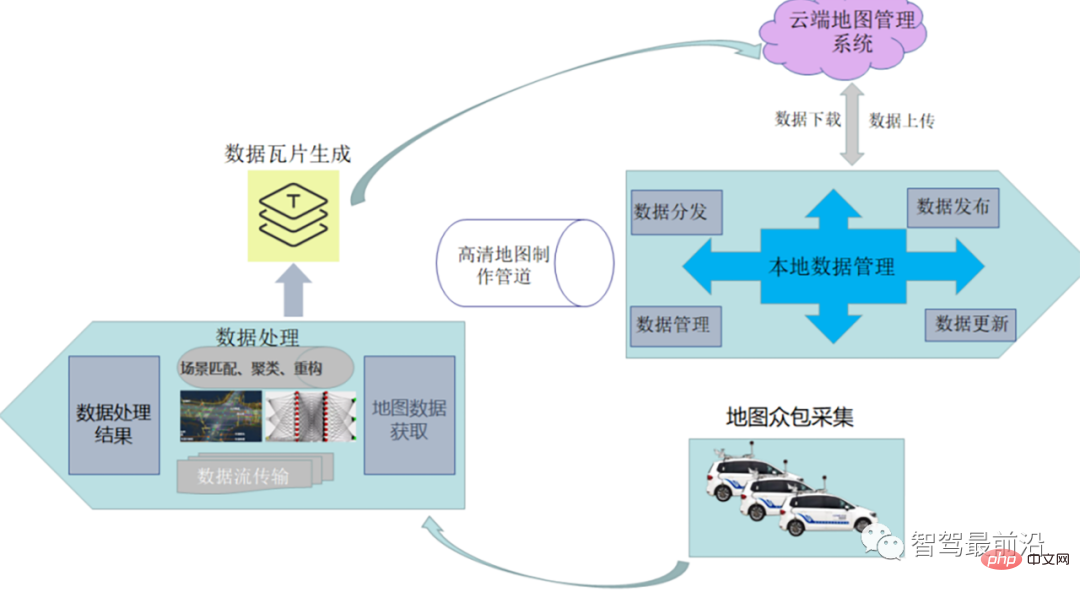
Le processus le plus important de cartographie de haute précision est la collecte et la distribution de cartes en crowdsourcing. Concernant la collecte de données cartographiques participatives, on peut en fait comprendre que les données routières collectées par les utilisateurs via les propres capteurs du véhicule autonome ou d'autres matériels de capteurs à faible coût sont transmises au cloud pour la fusion des données, et les données sont améliorées grâce à agrégation des données pour compléter la production de cartes de haute précision. L'ensemble du processus de crowdsourcing comprend en fait le reporting des capteurs physiques, la mise en correspondance des scènes cartographiques, le regroupement de scènes, la détection des changements et la mise à jour.
L'architecture cartographique de haute précision actuelle du système de conduite autonome est toujours orientée vers une approche distribuée. Ses éléments clés incluent la collecte participative de cartes, l'analyse des informations originales de la carte de haute précision par la boîte à cartes et comment la carte fusionne les autres données d'entrée du capteur, etc. Notons ici que la future architecture des systèmes de conduite autonome continuera d’évoluer de méthodes de développement distribuées vers des méthodes centralisées. L'approche centralisée peut être considérée comme trois ou deux étapes :
C'est-à-dire que les systèmes ADS de conduite intelligente et AVP de stationnement intelligent sont entièrement contrôlés de manière centralisée, à l'aide d'un préréglage central. Le dispositif de traitement intègre, prédit, planifie et autres méthodes de traitement des informations à traiter dans les deux principaux systèmes. Les méthodes de traitement de toutes les unités de détection et de données liées à la conduite intelligente et au stationnement intelligent (cartes de haute précision, lidar, caméras entièrement distribuées, radar à ondes millimétriques, etc.) seront intégrées en conséquence dans l'unité centrale de contrôle du domaine.
Cette méthode est la deuxième étape pour obtenir une méthode de distribution entièrement centralisée, qui consiste à développer toutes les fonctions couvertes par le contrôleur de domaine de conduite intelligente (telles que conduite autonome, stationnement automatique) et le développement de toutes les fonctions couvertes par le domaine du cockpit intelligent (y compris le DMS de surveillance du conducteur, le système de divertissement audiovisuel iHU et le système d'affichage des instruments IP) sont intégrés et couverts.
Il s'agit d'une méthode de contrôle entièrement intégrée qui comprend les domaines de conduite intelligente, de cockpit intelligent et de châssis intelligent. Autrement dit, les trois fonctions principales sont intégrées dans l'unité de commande centrale du véhicule et le traitement ultérieur de ces données créera davantage d'exigences de performances (puissance de calcul, bande passante, stockage, etc.) pour le contrôleur de domaine.
Le développement du positionnement cartographique de haute précision qui nous préoccupe ici sera davantage orienté vers des méthodes de conception centralisées à l'avenir. Nous allons développer cela.
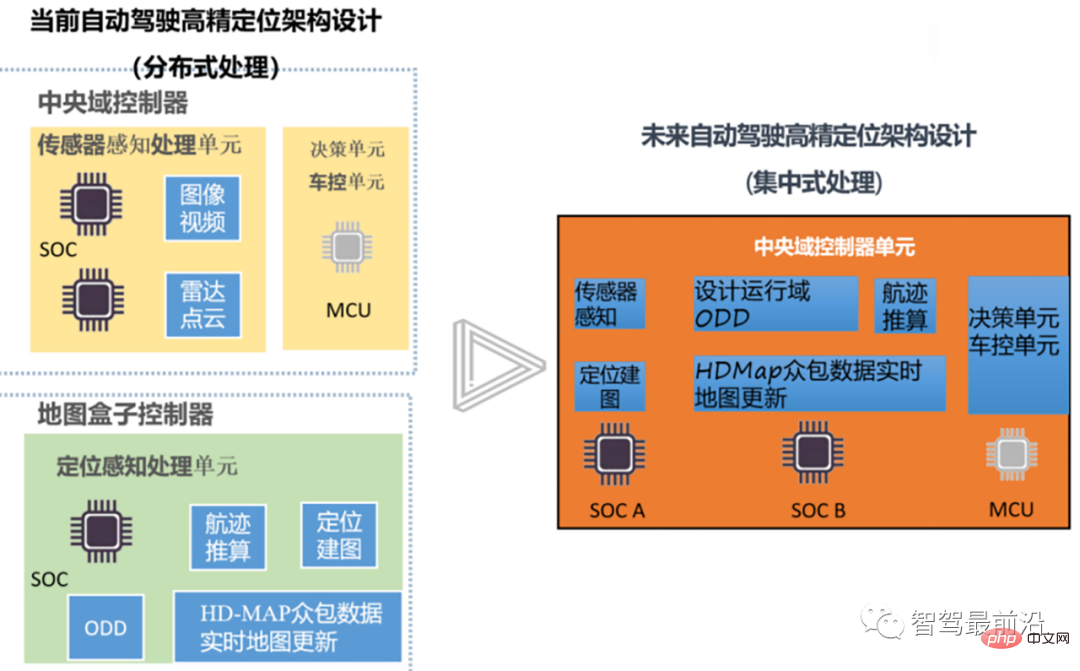
La figure ci-dessus montre la tendance du développement architectural des cartes de haute précision dans le futur contrôle des systèmes de conduite autonome. À l’avenir, les systèmes de conduite autonome s’efforceront d’intégrer l’unité de détection, l’unité de prise de décision et l’unité de positionnement cartographique dans l’unité centrale de contrôle du domaine, dans le but de réduire de bas en haut la dépendance à l’égard des boîtes cartographiques de haute précision. La conception de son contrôleur de domaine prend pleinement en compte l'intégration complète du SOC de la puce informatique AI, de la puce informatique logique MCU et du boîtier de cartographie de haute précision.
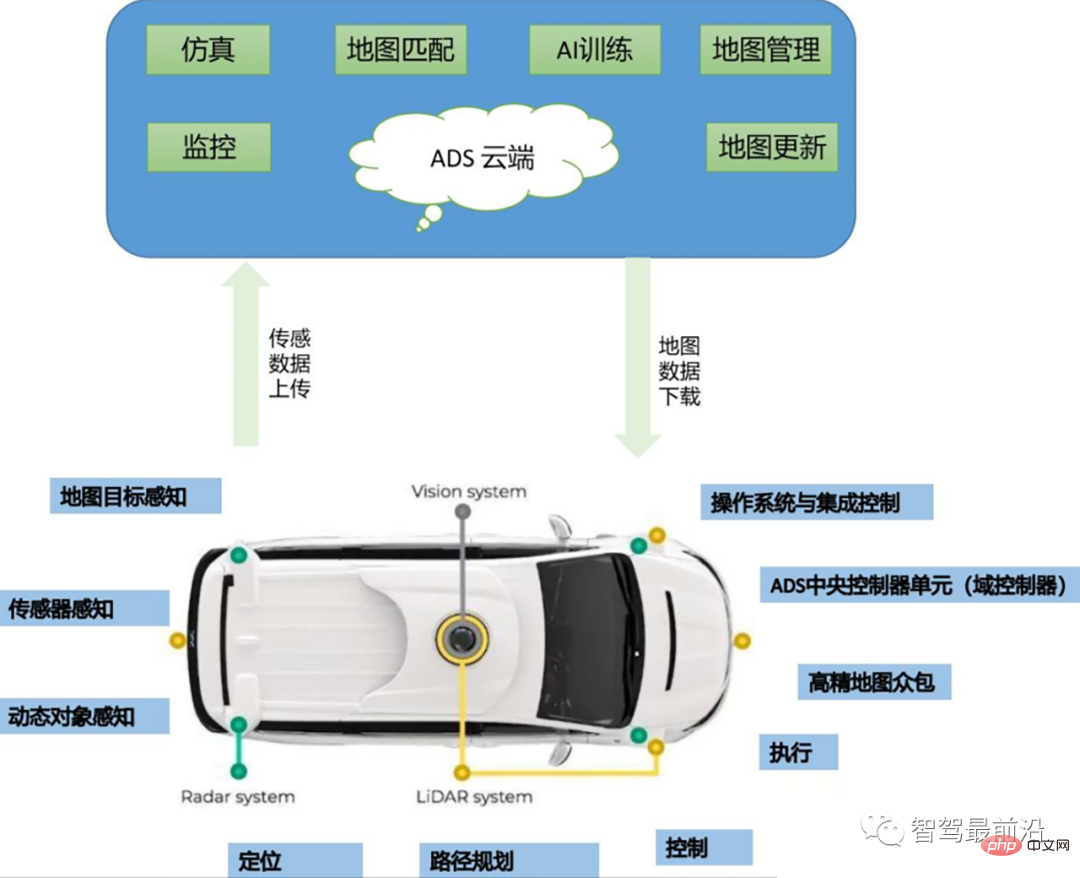
La figure ci-dessus montre la collecte de données de capteurs cartographiques de haute précision, l'apprentissage des données, la formation à l'IA, les services de cartographie de haute précision, la simulation et d'autres services correspondants dans toute la logique de contrôle du cloud en même temps, pendant le mouvement. et processus de vérification du véhicule Les données cartographiques seront continuellement mises à jour grâce à la détection physique, à la détection de données dynamiques, à la détection de cibles cartographiques, au positionnement, à la planification de chemin et à d'autres contenus, et l'OTA sera téléchargée sur le cloud pour mettre à jour l'ensemble des données participatives.
L'article précédent décrivait le processus par lequel les données cartographiques de haute précision génèrent des données pertinentes qui peuvent être traitées par le contrôleur de conduite autonome. Nous savons que les données originales traitées par les cartes de haute précision sont des données EHP. Les données contiennent en fait les principaux supports de données suivants :
1 : informations de localisation GPS externes reçues
2 : informations de localisation adaptées à la carte ; 4 : envoyer des données via CAN ;
5 : fusion d'une partie des données de navigation ;
Les données sont généralement traitées directement depuis l'extrémité de détection HDMap via Gigabit Ethernet, puis entrées dans la centrale cartographique de haute précision ; L'unité centrale de traitement est ce que nous appelons la « boîte à cartes de haute précision ». Grâce à un traitement ultérieur des données via la boîte cartographique (nous expliquerons ce processus de traitement réel en détail dans un article ultérieur), elles peuvent être converties en données DSE (en fait CanFD) qui peuvent être traitées par le contrôleur de conduite autonome.
Pour la prochaine génération de systèmes de conduite autonome, nous nous engageons à intégrer des informations cartographiques de haute précision dans le contrôleur de domaine de conduite autonome pour un traitement global. Ce processus signifie que notre contrôleur de domaine de conduite autonome doit se connecter à la boîte de carte. Pour tout travail d'analyse de données, nous devons nous concentrer sur les points suivants :
1) La puce IA du contrôleur de domaine de conduite autonome peut-elle gérer toutes les données de capteur requises pour les cartes de haute précision ?
2) L'unité d'opération logique de la carte de positionnement de haute précision dispose-t-elle de suffisamment de puissance de calcul pour effectuer la fusion des informations des données des capteurs ?
3) L'ensemble du système d'exploitation sous-jacent répond-il aux exigences de sécurité fonctionnelle ?
4) Quelle méthode de connexion est utilisée entre la puce AI et la puce logique pour assurer la fiabilité de la transmission des données, Ethernet ou CanFD ?
Afin de répondre aux questions ci-dessus, nous devons analyser la façon dont le contrôleur traite les données cartographiques de haute précision, comme le montre la figure ci-dessous.
est la puce IA du système de conduite autonome. Dans le futur traitement des données cartographiques de haute précision, elle est principalement responsable du traitement de base des données des capteurs, y compris les données de la caméra, les données lidar et les ondes millimétriques. données, etc En plus de la fusion et du clustering de nuages de points de données de base, les méthodes de traitement appliquées incluent également des algorithmes d'apprentissage en profondeur couramment utilisés, et les cœurs ARM sont généralement utilisés pour le traitement informatique central.
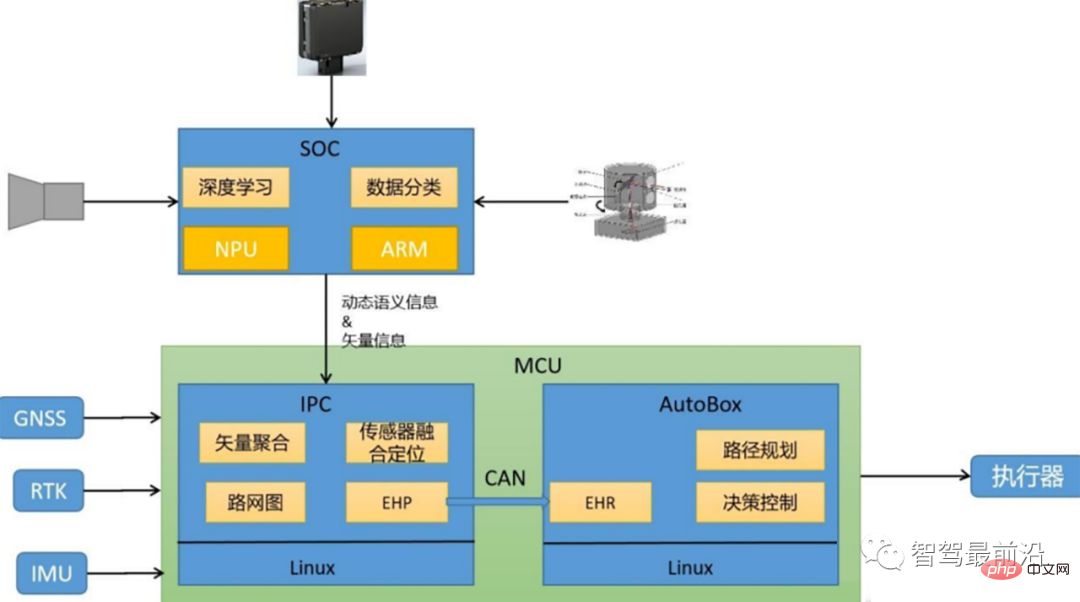 En tant qu'unité d'opération logique du contrôleur de domaine de conduite autonome, le MCU entreprendra ensuite tous les calculs logiques requis par la boîte de cartographie originale de haute précision. Y compris l'agrégation de vecteurs frontaux, le positionnement de fusion de capteurs, la création de cartes du réseau routier et, plus important encore, le remplacement de la fonction de boîte de carte d'origine pour convertir les informations EHP en signaux DSE (comment l'unité centrale de traitement MCU peut convertir efficacement les informations EHP en informations DSE Sera détaillé dans un article ultérieur) et effectuer une transmission efficace du signal via les lignes Can. Enfin, AutoBox, une unité d'opération logique, est utilisée pour la planification du trajet, le contrôle de la prise de décision et d'autres opérations.
En tant qu'unité d'opération logique du contrôleur de domaine de conduite autonome, le MCU entreprendra ensuite tous les calculs logiques requis par la boîte de cartographie originale de haute précision. Y compris l'agrégation de vecteurs frontaux, le positionnement de fusion de capteurs, la création de cartes du réseau routier et, plus important encore, le remplacement de la fonction de boîte de carte d'origine pour convertir les informations EHP en signaux DSE (comment l'unité centrale de traitement MCU peut convertir efficacement les informations EHP en informations DSE Sera détaillé dans un article ultérieur) et effectuer une transmission efficace du signal via les lignes Can. Enfin, AutoBox, une unité d'opération logique, est utilisée pour la planification du trajet, le contrôle de la prise de décision et d'autres opérations.
La future conduite autonome aura tendance à intégrer toutes les informations traitées par les cartes de haute précision depuis la boîte de cartes d'origine dans le contrôleur de domaine de conduite autonome, dans le but d'établir un véritable contrôle du domaine du véhicule. L'unité centrale est un fusion à grande échelle d'unités intégrées. Cette méthode peut non seulement économiser davantage de ressources informatiques, mais également permettre à l'algorithme de traitement des données de l'IA d'être mieux appliqué au positionnement de haute précision, garantissant ainsi la cohérence de la compréhension de l'environnement par les deux. Nous devons accorder plus d'attention à l'orientation importante de l'intégration des données de capteurs de haute précision à l'avenir et consacrer davantage d'efforts à la puissance de calcul des puces, à la conception des interfaces, à la conception de la bande passante et à la conception de la sécurité fonctionnelle.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Page d'erreur 404 de l'ordinateur
Page d'erreur 404 de l'ordinateur
 Solution à l'invite de table de partition non valide au démarrage de Windows 10
Solution à l'invite de table de partition non valide au démarrage de Windows 10
 Comment résoudre le problème de ssleay32.dll manquant
Comment résoudre le problème de ssleay32.dll manquant
 Comment définir l'IP
Comment définir l'IP
 Comment ouvrir le fichier d'état
Comment ouvrir le fichier d'état
 Pourquoi le disque dur mobile est-il si lent à s'ouvrir ?
Pourquoi le disque dur mobile est-il si lent à s'ouvrir ?
 Quelles sont les unités de base du langage C ?
Quelles sont les unités de base du langage C ?
 Quelle plateforme est Kuai Tuan Tuan ?
Quelle plateforme est Kuai Tuan Tuan ?








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



