



L'article explique principalement pourquoi le modèle de réseau neuronal surparamétré peut avoir de bonnes performances de généralisation ? Autrement dit, il ne mémorise pas simplement l'ensemble de formation, mais résume une règle générale de l'ensemble de formation, afin qu'elle puisse être adaptée à l'ensemble de test (capacité de généralisation).
Prenons l'exemple du modèle d'arbre de décision classique. Lorsque le modèle d'arbre apprend les règles générales de l'ensemble de données : une bonne situation est que si l'arbre divise d'abord le nœud, il peut simplement bien distinguer les échantillons avec des étiquettes différentes. . , la profondeur est très faible et le nombre correspondant d'échantillons sur chaque feuille est suffisant (c'est-à-dire que la quantité de données basées sur des règles statistiques est également relativement importante), alors les règles obtenues sont plus susceptibles d'être généralisées à d'autres données. . (c'est-à-dire : bon ajustement et capacité de généralisation).
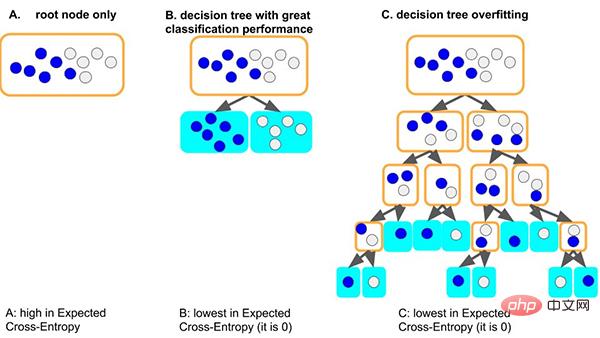
Une autre situation pire est que si l'arbre ne peut pas apprendre certaines règles générales, afin d'apprendre cet ensemble de données, l'arbre deviendra de plus en plus profond, et chaque nœud feuille peut correspondre à un petit nombre d'échantillons (moins le les informations statistiques apportées par les données peuvent n'être que du bruit), et enfin, mémoriser toutes les données par cœur (c'est-à-dire : surapprentissage et aucune capacité de généralisation). Nous pouvons voir que les modèles d’arbres trop profonds peuvent facilement être surajustés.
Alors, comment un réseau de neurones surparamétré peut-il parvenir à une bonne généralisation ?
Cet article explique d'un point de vue simple et général - en explorant les raisons de la capacité de généralisation dans le processus d'optimisation de la descente de gradient des réseaux de neurones :
Nous avons résumé la théorie de la cohérence du gradient : Les gradients des différents échantillons produisent de la cohérence, c'est pourquoi les réseaux de neurones peuvent avoir de bonnes capacités de généralisation. Lorsque les gradients des différents échantillons sont bien alignés pendant l’entraînement, c’est-à-dire lorsqu’ils sont cohérents, la descente de gradient est stable, peut converger rapidement et le modèle résultant peut bien se généraliser. Sinon, si les échantillons sont trop peu nombreux ou si le temps de formation est trop long, cela risque de ne pas se généraliser.

Sur la base de cette théorie, nous pouvons faire l'explication suivante.
Les modèles de réseaux de neurones plus larges ont de bonnes capacités de généralisation. En effet, les réseaux plus larges comportent plus de sous-réseaux et sont plus susceptibles de produire une cohérence de gradient que les réseaux plus petits, ce qui entraîne une meilleure généralisation. En d’autres termes, la descente de gradient est un sélecteur de fonctionnalités qui donne la priorité aux gradients de généralisation (cohérence), et des réseaux plus larges peuvent avoir de meilleures fonctionnalités simplement parce qu’ils ont plus de fonctionnalités.
Mais personnellement, je pense qu'il faut encore distinguer la largeur de la couche d'entrée réseau/couche cachée. Surtout pour la couche d'entrée des tâches d'exploration de données, étant donné que les entités d'entrée sont généralement conçues manuellement, vous devez envisager la sélection des entités (c'est-à-dire réduire la largeur de la couche d'entrée, sinon l'entrée directe du bruit des entités interférera avec la cohérence du dégradé). .
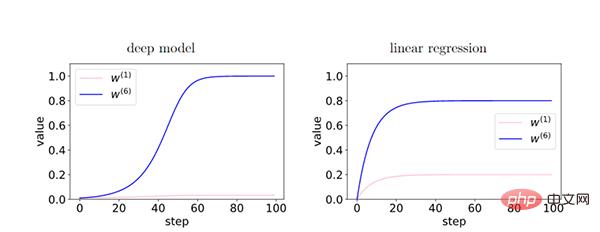
Plus le réseau est profond, le phénomène de cohérence du gradient est amplifié et a une meilleure capacité de généralisation.

Dans le modèle profond, puisque le feedback entre les couches renforce le gradient cohérent, il existe une différence relative entre les caractéristiques du gradient cohérent (W6) et les caractéristiques du gradient incohérent (W1) pendant le processus d'entraînement. De manière exponentielle amplifié. Cela amène les réseaux plus profonds à préférer les gradients cohérents, ce qui se traduit par de meilleures capacités de généralisation.
En arrêtant tôt, nous pouvons réduire l'influence excessive des gradients incohérents et améliorer la généralisation.
Pendant l'entraînement, certains échantillons faciles s'ajustent plus tôt que d'autres échantillons (échantillons durs). Au début de la formation, le gradient de corrélation de ces échantillons faciles domine et est facile à ajuster. Au stade ultérieur de la formation, le gradient incohérent des échantillons difficiles domine le gradient moyen g(wt), ce qui entraîne une faible capacité de généralisation. À ce stade, il est nécessaire de s'arrêter tôt.

Nous avons constaté que la descente à gradient complet peut également avoir une bonne capacité de généralisation. En outre, des expériences minutieuses montrent que la descente de gradient stochastique ne conduit pas nécessairement à une meilleure généralisation, mais cela n'exclut pas la possibilité que les gradients stochastiques soient plus susceptibles de sortir des minima locaux, de jouer un rôle dans la régularisation, etc.
Nous pensons qu'un taux d'apprentissage inférieur ne peut pas réduire l'erreur de généralisation, car un taux d'apprentissage inférieur signifie plus de nombre d'itérations (à l'opposé d'arrêt anticipé).
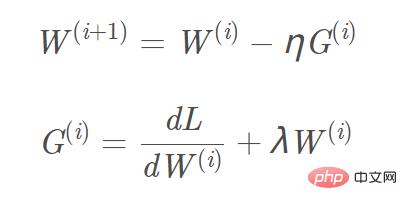
Ajoutez la régularisation L2 et L1 à la fonction objectif, et le calcul du gradient correspondant, le gradient qui doit être ajouté au terme de régularisation L1 est le signe ( w), et le gradient L2 est w. En prenant la régularisation L2 comme exemple, la formule de mise à jour du gradient W(i+1) correspondante est : Image
Nous pouvons considérer la « régularisation L2 (atténuation du poids) » comme une « force de fond », et chaque paramètre est poussé proche d'une valeur zéro indépendante des données (L1 est facile d'obtenir une solution clairsemée, et L2 est facile d'obtenir une solution lisse proche de 0) pour éliminer l'influence dans la direction du gradient faible. Ce n'est que dans le cas de directions de gradient cohérentes que les paramètres peuvent être relativement séparés de la « force de fond » et que la mise à jour du gradient peut être effectuée sur la base des données.

Momentum, Adam et autres algorithmes de descente de gradient, la direction de mise à jour du paramètre W est non seulement déterminée par le gradient actuel, mais également par le gradient précédemment accumulé. La direction du gradient est liée (c'est-à-dire que l'effet des gradients cohérents accumulés est préservé). Cela permet aux paramètres d'être mis à jour plus rapidement dans les dimensions où la direction du gradient change légèrement, et réduit l'amplitude de mise à jour dans les dimensions où la direction du gradient change de manière significative, ce qui a pour effet d'accélérer la convergence et de réduire l'oscillation.
Nous pouvons supprimer les mises à jour de gradient dans les directions de gradient faible en optimisant l'algorithme de descente de gradient par lots, améliorant ainsi les capacités de généralisation. Par exemple, nous pouvons utiliser la descente de gradient winsorisée pour exclure les valeurs aberrantes du gradient, puis prendre la moyenne. Ou prenez la médiane du gradient au lieu de la moyenne pour réduire l'impact des valeurs aberrantes du gradient.

Quelques mots à la fin de l'article Si vous êtes intéressé par la théorie de l'apprentissage profond, vous pouvez lire les recherches connexes mentionnées dans l'article.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 comment cacher l'adresse IP
comment cacher l'adresse IP
 La différence entre les fonctions fléchées et les fonctions ordinaires
La différence entre les fonctions fléchées et les fonctions ordinaires
 Comment activer la même fonction de ville sur Douyin
Comment activer la même fonction de ville sur Douyin
 Comment ouvrir l'autorisation de téléchargement de Douyin
Comment ouvrir l'autorisation de téléchargement de Douyin
 Comment supprimer des pages vierges dans Word
Comment supprimer des pages vierges dans Word
 Comment diffuser l'écran d'un téléphone mobile Huawei sur un téléviseur
Comment diffuser l'écran d'un téléphone mobile Huawei sur un téléviseur
 Comment résoudre le statut http 404
Comment résoudre le statut http 404
 Comment se connecter à la base de données en utilisant VB
Comment se connecter à la base de données en utilisant VB








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



